Download as pdf or txt
You might also like
- Bolt Pocket ChartDocument2 pagesBolt Pocket ChartAlex Lara100% (1)
- Pc6 Building ManualDocument38 pagesPc6 Building Manualrogerkat100% (1)
- Ms660 Parts ListDocument46 pagesMs660 Parts ListVladut MariusNo ratings yet
- Xpag BoltsDocument9 pagesXpag BoltsNakkolopNo ratings yet
- Standard Stud SizeDocument4 pagesStandard Stud Sizeranjith_p7No ratings yet
- Protobot Tumbler Guide 0711Document53 pagesProtobot Tumbler Guide 0711Aris MedinaNo ratings yet
- WheelsDocument20 pagesWheelsneeshakothari31No ratings yet
- 06 632Document12 pages06 632Fernando Sabino100% (1)
- SN 128 Mar Apr - 2013Document57 pagesSN 128 Mar Apr - 2013Juan Luis Carr100% (4)
- Quick Start Guide For Building The Clawbot: 1 G. Tagaytay/BCPSSDocument24 pagesQuick Start Guide For Building The Clawbot: 1 G. Tagaytay/BCPSSHeliodoro avendañoNo ratings yet
- BenchDocument13 pagesBenchRonald OsorioNo ratings yet
- Grinding Wheels CatalougesDocument21 pagesGrinding Wheels Catalougestamson19071978No ratings yet
- C DodgeDocument42 pagesC DodgeDaniel BolivarNo ratings yet
- Flange Data: Bolt Reference Charts For ASME B16.5 FlangesDocument4 pagesFlange Data: Bolt Reference Charts For ASME B16.5 FlangesMilena Lemus FonsecaNo ratings yet
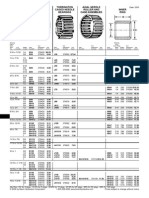
- Q36 Torrington Torrington Axial Needle Full Complement Caged Needle Roller and Inner Needle Bearings Bearings Cage Assemblies RingDocument1 pageQ36 Torrington Torrington Axial Needle Full Complement Caged Needle Roller and Inner Needle Bearings Bearings Cage Assemblies RingSteven HowellNo ratings yet
- Spare Parts & Tools: Wheels / Ruote / RouesDocument42 pagesSpare Parts & Tools: Wheels / Ruote / RouesjosskriptiNo ratings yet
- Cold Finish SteelDocument5 pagesCold Finish SteelMahdi DoroodchiNo ratings yet
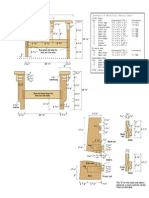
- Contoured Park Bench 2d DocumentationDocument1 pageContoured Park Bench 2d DocumentationDusan SupeljakovicNo ratings yet
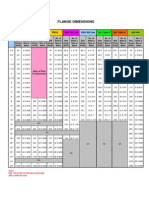
- Flange DimensionsDocument1 pageFlange Dimensionsian_radanke4481No ratings yet
- Dana Ford 35Document6 pagesDana Ford 35Kerry PeyattNo ratings yet
- Morris ChairDocument1 pageMorris ChairslavikpNo ratings yet
- KE Klappliste1712007Document40 pagesKE Klappliste1712007ways4successNo ratings yet
- 80cc (LT80 1996-2001) Suzuki ATV Parts ListDocument39 pages80cc (LT80 1996-2001) Suzuki ATV Parts ListMark100% (3)
- In Movi Liza DorDocument40 pagesIn Movi Liza DorBrad FrancNo ratings yet
- Dremel 2012AccessoryPosterDocument1 pageDremel 2012AccessoryPosterwdowiuueNo ratings yet
- Price Each Fits Ref# Other Bore STD .020 .030.040 .060 S/F WR NRDocument28 pagesPrice Each Fits Ref# Other Bore STD .020 .030.040 .060 S/F WR NRPrashanthKumarNo ratings yet
- Pocket Bolt Reference Chart: Sealing Global - Servicing LocalDocument2 pagesPocket Bolt Reference Chart: Sealing Global - Servicing Localgazwang478No ratings yet
- Numero de Partes de Todos Los YenkosDocument1 pageNumero de Partes de Todos Los YenkosJose Antonio AcostaNo ratings yet
- Pricing Subject To Change Without Notice MSI Item # General Description List Price Net EaDocument14 pagesPricing Subject To Change Without Notice MSI Item # General Description List Price Net EaconyterNo ratings yet
- Abs - MX15Document165 pagesAbs - MX15maiconmmendesNo ratings yet
- Transaxle Rear Axle PDFDocument2 pagesTransaxle Rear Axle PDFJORGE MONTESNo ratings yet
- Splined CouplingsDocument1 pageSplined CouplingsDark CenobiteNo ratings yet
- Tabla Blow by MotoresDocument1 pageTabla Blow by MotoresEricsson Via100% (1)
- Design of Anchor Bolts - Table ADocument1 pageDesign of Anchor Bolts - Table AnirgaNo ratings yet
- Cricri Materials ListDocument8 pagesCricri Materials ListAnubhav JoshiNo ratings yet
- Tech Specs KH 66 KH 82 enDocument1 pageTech Specs KH 66 KH 82 enlukaz_clNo ratings yet
- Mini Cut-Off Wheels: Available Wheel Size & Standard Packing QuantityDocument11 pagesMini Cut-Off Wheels: Available Wheel Size & Standard Packing Quantityherysyam1980No ratings yet
- Stihl ms-210 ms-230 Ms-250.iplDocument17 pagesStihl ms-210 ms-230 Ms-250.iplRosario SimbariNo ratings yet
- Flywheel Housing, 504BDT Engine PDFDocument3 pagesFlywheel Housing, 504BDT Engine PDFJhonny RodriguezNo ratings yet
- Pipping DataDocument273 pagesPipping DataidiazgNo ratings yet
- Material Takeoff ExampleDocument5 pagesMaterial Takeoff ExampleXOZININo ratings yet
- TSNA-G Seal For SNK Housings: TSNG Seal Can Fit Both Metric & Imperial ShaftDocument1 pageTSNA-G Seal For SNK Housings: TSNG Seal Can Fit Both Metric & Imperial ShaftfechaveNo ratings yet
- Engineering Keys and Pins Boksburg South AfricaDocument15 pagesEngineering Keys and Pins Boksburg South AfricaCorneNo ratings yet
- Titan Slide GateDocument1 pageTitan Slide GateJavier CharrezNo ratings yet
- Scythe DownloadsDocument2 pagesScythe Downloadsm03pppNo ratings yet
- Technical InfoDocument36 pagesTechnical InfoRuggeroSimonelliNo ratings yet
- AS Fase (1) REV #2 Acero Zapatas Z11 y Z3 Junto A GrúaDocument87 pagesAS Fase (1) REV #2 Acero Zapatas Z11 y Z3 Junto A GrúaFrancis Alberto Espinosa PerezNo ratings yet
- Catalog DisksDocument15 pagesCatalog Disksjanuar1983No ratings yet
- Repocision SistemaDocument10 pagesRepocision SistemaPamela VillarroelNo ratings yet
- Compatibilità Flange Compatibility FlangeDocument7 pagesCompatibilità Flange Compatibility FlangeRåttanihåletNo ratings yet
- Aluminum Zees Tees ExtrusionsDocument1 pageAluminum Zees Tees ExtrusionsRaj Kumar GiriNo ratings yet
- 2020 Annual Report Printed Version ERRATUM #2Document7 pages2020 Annual Report Printed Version ERRATUM #2JD2750No ratings yet
- Bearings & Bushings Chassis & Attachments: Slash 4X4 Platinum (Model 6804) Parts ListDocument3 pagesBearings & Bushings Chassis & Attachments: Slash 4X4 Platinum (Model 6804) Parts ListDoranNo ratings yet
- Game Mat 2024 JuniorDocument1 pageGame Mat 2024 Juniorroures76No ratings yet
- WRO 2024 RoboMission ElementaryDocument11 pagesWRO 2024 RoboMission Elementaryroures76No ratings yet
- RM Elementary Full Instructions 2024Document158 pagesRM Elementary Full Instructions 2024roures76No ratings yet
- PIC16F87X STK v3Document1 pagePIC16F87X STK v3roures76100% (1)
- En 71-1 2011 PDFDocument128 pagesEn 71-1 2011 PDFroures76No ratings yet
- Bases para Formar Un Fab LabDocument65 pagesBases para Formar Un Fab Labroures76No ratings yet