You might also like
- ITP - CCTV System InstallationDocument6 pagesITP - CCTV System InstallationGultom Juliana LiliesNo ratings yet
- CHEMCAD user's guide CC-STEADY STATE and CC-BATCH tutorialDocument237 pagesCHEMCAD user's guide CC-STEADY STATE and CC-BATCH tutorialwashiloo7208No ratings yet
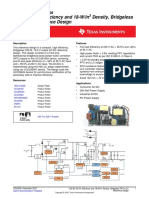
- Tiduef8 PDFDocument23 pagesTiduef8 PDFchethanNo ratings yet
- Tiduef8 PDFDocument23 pagesTiduef8 PDFchethanNo ratings yet
- Tiduef8 PDFDocument23 pagesTiduef8 PDFchethanNo ratings yet
- Scrivener User Manual For MacDocument516 pagesScrivener User Manual For MacisaakbabelNo ratings yet
- Acatech STUDIE Maturity Index Eng WEB PDFDocument60 pagesAcatech STUDIE Maturity Index Eng WEB PDFCarlos MolinaNo ratings yet
- Ms Word ProjectDocument1 pageMs Word Projectapi-27149177No ratings yet
- Correspondence Iso 20k 27k and 9kDocument4 pagesCorrespondence Iso 20k 27k and 9kabrahamNo ratings yet
- Self Organizing NetworkDocument20 pagesSelf Organizing NetworkguptadivyanshuNo ratings yet
- Adaptive Back Stepping Control For Linear Induction Motor Drive Using FPGADocument6 pagesAdaptive Back Stepping Control For Linear Induction Motor Drive Using FPGAchethanNo ratings yet
- An Efficient FPGA Based Real-Time Implementation Shunt Active Power Filter For Current Harmonic Elimination and Reactive Power CompensationDocument12 pagesAn Efficient FPGA Based Real-Time Implementation Shunt Active Power Filter For Current Harmonic Elimination and Reactive Power CompensationBouchaib EssoussiNo ratings yet
- Complex State-Space Modeling and Nonlinear Control of Active Front-End ConvertersDocument15 pagesComplex State-Space Modeling and Nonlinear Control of Active Front-End ConvertersMaikPortnoyNo ratings yet
- Resonant Frequency Control For The Pip-Ii Injector Test RFQ: Control Framework and Initial ResultsDocument4 pagesResonant Frequency Control For The Pip-Ii Injector Test RFQ: Control Framework and Initial ResultsAqsaNo ratings yet
- Single Input Fuzzy Logic Controller Boost ConverterDocument9 pagesSingle Input Fuzzy Logic Controller Boost ConverterTrình CôngNo ratings yet
- Adaptive Position Tracking Control of Permanent Magnet Synchronous MotorDocument8 pagesAdaptive Position Tracking Control of Permanent Magnet Synchronous MotorLê Đức ThịnhNo ratings yet
- Author 'S Accepted ManuscriptDocument36 pagesAuthor 'S Accepted ManuscriptPardha Saradhi JNo ratings yet
- Robotics 12 00105 v2Document16 pagesRobotics 12 00105 v2venkatesh allamNo ratings yet
- Self-Constructing Recurrent Fuzzy Neural Network For DSP-based Permanent-Magnet Linear-Synchronous-Motor ServodriveDocument11 pagesSelf-Constructing Recurrent Fuzzy Neural Network For DSP-based Permanent-Magnet Linear-Synchronous-Motor ServodriveJon JonNo ratings yet
- FPGA Design and Implementation Issues of Artificial Neural Network BasedDocument3 pagesFPGA Design and Implementation Issues of Artificial Neural Network Basedvigneshwaran50No ratings yet
- Electric Power Systems Research: SciencedirectDocument10 pagesElectric Power Systems Research: SciencedirectHamsa DeepikaNo ratings yet
- 1 s2.0 S1110016818301972 MainDocument12 pages1 s2.0 S1110016818301972 MainKaleeswari SaraswathiNo ratings yet
- Design and implementation of an efficient hardware architecture for EKF-SLAM's prediction stageDocument19 pagesDesign and implementation of an efficient hardware architecture for EKF-SLAM's prediction stageZAIDAN DIDINo ratings yet
- HTTPWWW Itl Waw Plczasopismajtit2011347Document10 pagesHTTPWWW Itl Waw Plczasopismajtit2011347Henry NguyenNo ratings yet
- Cascaded Multilevel InvertersDocument6 pagesCascaded Multilevel InvertersMinhaj NaimNo ratings yet
- Self Optimization Remote Eletrical-TiltDocument5 pagesSelf Optimization Remote Eletrical-TiltLêninho CarvalhoNo ratings yet
- 01 06Document6 pages01 06Vikas PatelNo ratings yet
- Takagi-Sugeno Fuzzy Logic Controller For DFIG OperatingDocument16 pagesTakagi-Sugeno Fuzzy Logic Controller For DFIG OperatingMohammed Saci ChabaniNo ratings yet
- Operation of Grid Connected PV-Battery-Wind Driven DFIG Based SystemDocument10 pagesOperation of Grid Connected PV-Battery-Wind Driven DFIG Based SystemnaveenNo ratings yet
- Adaptive Neural Network Sliding ModeDocument14 pagesAdaptive Neural Network Sliding Modedelima palwa sariNo ratings yet
- Fuzzy-Based MPPT Algorithm Implementation On FPGA Chip For Multi-Channel Photovoltaic SystemDocument10 pagesFuzzy-Based MPPT Algorithm Implementation On FPGA Chip For Multi-Channel Photovoltaic SystemIJRES teamNo ratings yet
- Digital Design and Implementation of An Overcurrent Relay On FPGADocument5 pagesDigital Design and Implementation of An Overcurrent Relay On FPGANandi ?No ratings yet
- Robust adaptive neural network backstepping control for PMSM drivesDocument22 pagesRobust adaptive neural network backstepping control for PMSM drivesMahmoud AminNo ratings yet
- Uplink Performance Optimization in Relay Enhanced LTE-Advanced NetworksDocument5 pagesUplink Performance Optimization in Relay Enhanced LTE-Advanced Networksgregor81wrocNo ratings yet
- Levitador IEEEDocument6 pagesLevitador IEEEOscar Lob GioNo ratings yet
- Development and Implementation of A New Adaptive Intelligent Speed Controller For IPMSM DriveDocument10 pagesDevelopment and Implementation of A New Adaptive Intelligent Speed Controller For IPMSM DriveJose Leonardo Simancas GarciaNo ratings yet
- Fpga Based Fuzzy Logic Controller For Electric VehicleDocument14 pagesFpga Based Fuzzy Logic Controller For Electric Vehiclekavicharan414No ratings yet
- TermpaperDocument30 pagesTermpaperMuzammil NaeemNo ratings yet
- Multi Verse Optimized Fractional Order PDPI Controller For Load Frequency ControlDocument15 pagesMulti Verse Optimized Fractional Order PDPI Controller For Load Frequency Controlsrinivasa rathnamNo ratings yet
- A Generalized Direct Approach For Designing FuzzyDocument28 pagesA Generalized Direct Approach For Designing Fuzzysaurabh puthalNo ratings yet
- Some TitleDocument8 pagesSome TitleMohammed ImranNo ratings yet
- An Energy-Efficient Reconfigurable Public-Key Cryptography ProcessorDocument13 pagesAn Energy-Efficient Reconfigurable Public-Key Cryptography ProcessorseanNo ratings yet
- An FPGA Based Control Algorithm For Cascaded Multilevel InvertersDocument5 pagesAn FPGA Based Control Algorithm For Cascaded Multilevel Inverterstham_psdcNo ratings yet
- 1 s2.0 S0142061517330727 MainDocument12 pages1 s2.0 S0142061517330727 MainIrfanAhmedNo ratings yet
- Integrated Controller For An Over ConstrDocument6 pagesIntegrated Controller For An Over ConstrVictor Duran MuñozNo ratings yet
- Fuzzy DC-Voltage Controller For A Vector Controlled Stand-Alone Induction GeneratorDocument10 pagesFuzzy DC-Voltage Controller For A Vector Controlled Stand-Alone Induction GeneratorLeroy Lionel SonfackNo ratings yet
- Research ArticleDocument14 pagesResearch ArticleMaria RitaNo ratings yet
- Variable Voltage - Variable Frequency Controller - VVVF - An FPGA ApproachDocument2 pagesVariable Voltage - Variable Frequency Controller - VVVF - An FPGA ApproachInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Tuning of Control Loops For Grid Connected Voltage Source ConvertersDocument6 pagesTuning of Control Loops For Grid Connected Voltage Source ConvertersThiago Moura GalvãoNo ratings yet
- Embedded Two Level Direct Adaptive Fuzzy Controller for DC Motor Speed ControlDocument11 pagesEmbedded Two Level Direct Adaptive Fuzzy Controller for DC Motor Speed ControlMohammed SelmanNo ratings yet
- Adaptive Neural Network Control of Robot Manipulators in Task SpaceDocument7 pagesAdaptive Neural Network Control of Robot Manipulators in Task Spacele duc huynhNo ratings yet
- IPMSM Model Predictive Control in Flux-Weakening Operation Using An Improved AlgorithmDocument10 pagesIPMSM Model Predictive Control in Flux-Weakening Operation Using An Improved Algorithmalaref elhajNo ratings yet
- Field Programmable Gate Array Based Speed Control of BLDC MotorDocument6 pagesField Programmable Gate Array Based Speed Control of BLDC MotorVidhya M PNo ratings yet
- FPGA Implementations of Feed Forward Neural Network by Using Floating Point Hardware AcceleratorsDocument10 pagesFPGA Implementations of Feed Forward Neural Network by Using Floating Point Hardware AcceleratorsCarlos Torres CasasNo ratings yet
- George 2021Document21 pagesGeorge 2021Praful YadavNo ratings yet
- Low Cost Fuzzy Logic Based Speed Control of BLDC Motor DrivesDocument6 pagesLow Cost Fuzzy Logic Based Speed Control of BLDC Motor DrivesAlex CastilloNo ratings yet
- Design Concept of FPGA-Based Chip Considerations of Flexible Functions Sliding Mode Strategy MotorDocument6 pagesDesign Concept of FPGA-Based Chip Considerations of Flexible Functions Sliding Mode Strategy MotorchethanNo ratings yet
- LFC v8 msc2013 Final PDFDocument7 pagesLFC v8 msc2013 Final PDFdimas sandiNo ratings yet
- SDR and NFV Extensions in The Ns-3 LTE Module For 5G Rapid PrototypingDocument6 pagesSDR and NFV Extensions in The Ns-3 LTE Module For 5G Rapid Prototypingamsaa zafranNo ratings yet
- 010220012Document11 pages010220012Mohammed KmailNo ratings yet
- Load Frequency Control Using Quasi-Oppositional Grey Wolf OptimizationDocument21 pagesLoad Frequency Control Using Quasi-Oppositional Grey Wolf Optimizationagus satyaNo ratings yet
- Project Titles For PG Students - June 2014: Department of Electrical Engineering COE PuneDocument13 pagesProject Titles For PG Students - June 2014: Department of Electrical Engineering COE PuneGrishma TantarpaleNo ratings yet
- Optimization of Load Frequency Control of Different Area System Based On Genetic AlgorithmDocument6 pagesOptimization of Load Frequency Control of Different Area System Based On Genetic AlgorithmInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- gpimentel2006Document8 pagesgpimentel2006kiranNo ratings yet
- A High-Efficiency Linear RF Power Amplifier With A Power-Tracking Dynamically Adaptive Buck-Boost SupplyDocument9 pagesA High-Efficiency Linear RF Power Amplifier With A Power-Tracking Dynamically Adaptive Buck-Boost SupplyashkanNo ratings yet
- ASIP Architecture Implementation of Channel Equalization Algorithms For MIMO Systems in WCDMA DownlinkDocument5 pagesASIP Architecture Implementation of Channel Equalization Algorithms For MIMO Systems in WCDMA DownlinkMunish JassiNo ratings yet
- 2018 Garcia-Saavedra Infocom FluidranDocument9 pages2018 Garcia-Saavedra Infocom FluidranPhelipe Alves de SouzaNo ratings yet
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- 3.operation When Feeding A Local Load, Synchronization & Grid FailureDocument19 pages3.operation When Feeding A Local Load, Synchronization & Grid FailurechethanNo ratings yet
- 3tee1111 L3BDocument9 pages3tee1111 L3BchethanNo ratings yet
- EE 111: Introduction to Synchronous MotorsDocument6 pagesEE 111: Introduction to Synchronous MotorschethanNo ratings yet
- 4.power Systems & Synchronous Motor Operation in IndiaDocument12 pages4.power Systems & Synchronous Motor Operation in IndiachethanNo ratings yet
- 3tee1111 L3aDocument16 pages3tee1111 L3achethanNo ratings yet
- Basic Electrical 11aDocument17 pagesBasic Electrical 11achethanNo ratings yet
- Basic Electrical 15Document17 pagesBasic Electrical 15chethanNo ratings yet
- 2.effect of Variation of Load P.F. On Synchronous MachineDocument13 pages2.effect of Variation of Load P.F. On Synchronous MachinechethanNo ratings yet
- 1.synchronous MachinesDocument13 pages1.synchronous MachineschethanNo ratings yet
- Basic Electrical 10aDocument20 pagesBasic Electrical 10achethanNo ratings yet
- Basic Electrical 13Document16 pagesBasic Electrical 13chethanNo ratings yet
- 3tee1111 L2BDocument14 pages3tee1111 L2BchethanNo ratings yet
- Baic Electrical 14Document18 pagesBaic Electrical 14chethanNo ratings yet
- Basic Electrical 12Document14 pagesBasic Electrical 12chethanNo ratings yet
- Basic Electrical 8thaDocument16 pagesBasic Electrical 8thachethanNo ratings yet
- Basic Electrical 7thbDocument12 pagesBasic Electrical 7thbchethanNo ratings yet
- DC Motor EmcDocument51 pagesDC Motor EmccalailNo ratings yet
- Basic Electrical Engineering 7thDocument14 pagesBasic Electrical Engineering 7thchethanNo ratings yet
- 3tee1111 L1aDocument23 pages3tee1111 L1achethanNo ratings yet
- 3tee1111 L2aDocument13 pages3tee1111 L2achethanNo ratings yet
- Radio Frequency DC-DC Power Conversion PDFDocument204 pagesRadio Frequency DC-DC Power Conversion PDFchethanNo ratings yet
- Basic Data Mining Techniques: AttributesDocument12 pagesBasic Data Mining Techniques: AttributeschethanNo ratings yet
- 55W - 29828 - 1 - Power Measurements On AC-DCDocument22 pages55W - 29828 - 1 - Power Measurements On AC-DCMansoor Abdul KhaderNo ratings yet
- Microgrid Battery StorageDocument129 pagesMicrogrid Battery StoragechethanNo ratings yet
- Project Report BANKING PROJECTDocument85 pagesProject Report BANKING PROJECTchethanNo ratings yet
- Final ProjectMANAGEMENT DEVELOPMENT PROGRAMMEDocument110 pagesFinal ProjectMANAGEMENT DEVELOPMENT PROGRAMMEchethanNo ratings yet
- Optimal Smart Home Energy Management PDFDocument9 pagesOptimal Smart Home Energy Management PDFchethanNo ratings yet
- Landmark Technology v. Bridgestone AmericasDocument18 pagesLandmark Technology v. Bridgestone AmericasPriorSmartNo ratings yet
- CitectSCADA 7.20 Service Pack 2 Release NotesDocument31 pagesCitectSCADA 7.20 Service Pack 2 Release Notesbasecamp cikarangNo ratings yet
- VDJ Default Keyboard ShortcutsDocument4 pagesVDJ Default Keyboard ShortcutsAnthoNugrahaNo ratings yet
- Introduction to Programming with PythonDocument57 pagesIntroduction to Programming with PythonChukwudi Eyeiwunmi ObiriNo ratings yet
- Sekilas Pandang Cyberpreneurship: M. Fakhrurrazi, Skom, MSCDocument31 pagesSekilas Pandang Cyberpreneurship: M. Fakhrurrazi, Skom, MSCApinNo ratings yet
- (LTE) - Default Bearer, Dedicated Bearer PDFDocument7 pages(LTE) - Default Bearer, Dedicated Bearer PDFABHISHEK AGARWALNo ratings yet
- Packet TracerDocument77 pagesPacket TracerTanveer ButtNo ratings yet
- Handbook of Coil WindingDocument8 pagesHandbook of Coil WindingSREENATH S.SNo ratings yet
- Mazda 3Document5 pagesMazda 3Jhony GranadosNo ratings yet
- BTS3900L-Quick Installation GuideDocument12 pagesBTS3900L-Quick Installation GuideimabadloserNo ratings yet
- Marzo 2023 Imprimir y Colorear - CalendarioDocument3 pagesMarzo 2023 Imprimir y Colorear - CalendarioGUADALUPE IVONNE TAPIA PACHECONo ratings yet
- inteliLIGHT® LoRa Data Sheet - FRE-220 ControllerDocument2 pagesinteliLIGHT® LoRa Data Sheet - FRE-220 ControllerSanela BeganovicNo ratings yet
- SVKM'S Nmims Mukesh Patel School of Technology Management & Engineering Computer Engineering DepartmentDocument10 pagesSVKM'S Nmims Mukesh Patel School of Technology Management & Engineering Computer Engineering DepartmentHemit ShahNo ratings yet
- Business Communication Process and Product 8th Edition Guffey Solutions ManualDocument23 pagesBusiness Communication Process and Product 8th Edition Guffey Solutions ManualDanielLopezfzio100% (51)
- CS 563-DeepLearning-SentimentApplication-April2022 (27403)Document124 pagesCS 563-DeepLearning-SentimentApplication-April2022 (27403)Varaprasad DNo ratings yet
- Dump Bailer PDFDocument1 pageDump Bailer PDFDaniex VillalobosNo ratings yet
- N B Prakash Tiruveedula Asst. Professor Department of Mechanical Engineering Vignan's Foundation For Science, Technology & ResearchDocument22 pagesN B Prakash Tiruveedula Asst. Professor Department of Mechanical Engineering Vignan's Foundation For Science, Technology & ResearchMannam Sarath SarathNo ratings yet
- BD Flyer A4 EDocument2 pagesBD Flyer A4 EMark ReinhardtNo ratings yet
- Network Programming Notes - SignalsDocument6 pagesNetwork Programming Notes - Signalstaleysha vuyanziNo ratings yet
- Crypto ASSIGNMENT 1Document6 pagesCrypto ASSIGNMENT 1deekshithj ShettyNo ratings yet
- Suprascan QuarzDocument6 pagesSuprascan QuarzSpataruIonNo ratings yet
- Philippines Weekly Home Learning Plan for Science 8Document1 pagePhilippines Weekly Home Learning Plan for Science 8Jaeda BaltazarNo ratings yet
- Sdrsharp, To Make Black and White Listeners See Colours..Document47 pagesSdrsharp, To Make Black and White Listeners See Colours..EricNo ratings yet
- McKinney Et Al v. GD Searle & Co Et Al - Document No. 2Document10 pagesMcKinney Et Al v. GD Searle & Co Et Al - Document No. 2Justia.comNo ratings yet