Download as pdf or txt
You might also like
- Problems & Solutions On Electric DrivesDocument11 pagesProblems & Solutions On Electric DrivesMohammad Umar Rehman67% (18)
- Introduction To Partial Differential Equations in Fluid Mechanics: Their Types and Some Analytical SolutionsDocument20 pagesIntroduction To Partial Differential Equations in Fluid Mechanics: Their Types and Some Analytical Solutions刘伟轩100% (1)
- Understanding Analysis - Solution of Exercise ProblemsDocument272 pagesUnderstanding Analysis - Solution of Exercise Problemsgt0084e1No ratings yet
- Solution Real Analysis Folland Ch6Document24 pagesSolution Real Analysis Folland Ch6ks0% (1)
- HW 4Document4 pagesHW 4api-379689650% (2)
- Integrals of Bessel FunctionsDocument13 pagesIntegrals of Bessel FunctionsCleber Pereira de SousaNo ratings yet
- Lecture 08 - Spectra and Perturbation Theory (Schuller's Lectures On Quantum Theory)Document13 pagesLecture 08 - Spectra and Perturbation Theory (Schuller's Lectures On Quantum Theory)Simon Rea100% (1)
- (ADVANCE ABSTRACT ALGEBRA) Pankaj Kumar and Nawneet HoodaDocument82 pages(ADVANCE ABSTRACT ALGEBRA) Pankaj Kumar and Nawneet HoodaAnonymous RVVCJlDU6No ratings yet
- Teaching Dossier: Andrew W. H. HouseDocument9 pagesTeaching Dossier: Andrew W. H. HouseMohammad Umar RehmanNo ratings yet
- Solution Manual - Control Systems by GopalDocument0 pagesSolution Manual - Control Systems by Gopalsaggu199185% (27)
- Bowling Performance TaskDocument2 pagesBowling Performance Taskapi-250392239No ratings yet
- KREYSZIG 10E (update版) -Errata CH1~CH18 小本 PDFDocument18 pagesKREYSZIG 10E (update版) -Errata CH1~CH18 小本 PDF李傑No ratings yet
- Math 138 Functional Analysis Notes PDFDocument159 pagesMath 138 Functional Analysis Notes PDFAidan HolwerdaNo ratings yet
- MATH2045: Vector Calculus & Complex Variable TheoryDocument50 pagesMATH2045: Vector Calculus & Complex Variable TheoryAnonymous 8nJXGPKnuW100% (2)
- Existence Results For Gradient Elliptic Systems With Nonlinear Boundary Conditions - Julian Fernandez BONDERDocument27 pagesExistence Results For Gradient Elliptic Systems With Nonlinear Boundary Conditions - Julian Fernandez BONDERJefferson Johannes Roth FilhoNo ratings yet
- Oscillation of Nonlinear Neutral Delay Differential Equations PDFDocument20 pagesOscillation of Nonlinear Neutral Delay Differential Equations PDFKulin DaveNo ratings yet
- Hadamard TransformDocument4 pagesHadamard TransformLucas Gallindo100% (1)
- ADOMIAN Decomposition Method For Solvin1Document18 pagesADOMIAN Decomposition Method For Solvin1Susi SusilowatiNo ratings yet
- Solution Set 3Document11 pagesSolution Set 3HaseebAhmadNo ratings yet
- Basel Problem ProofDocument7 pagesBasel Problem ProofCody JohnsonNo ratings yet
- Introduction To SupersymmetryDocument190 pagesIntroduction To Supersymmetryweiss13No ratings yet
- Mathtut2 PDFDocument120 pagesMathtut2 PDFChi PA JucaNo ratings yet
- 8.1 Convergence of Infinite ProductsDocument25 pages8.1 Convergence of Infinite ProductsSanjeev Shukla100% (1)
- Sample ProblemsDocument166 pagesSample ProblemsCeejhay PanganibanNo ratings yet
- Fact Sheet Functional AnalysisDocument9 pagesFact Sheet Functional AnalysisPete Jacopo Belbo CayaNo ratings yet
- Ee263 Ps1 SolDocument11 pagesEe263 Ps1 SolMorokot AngelaNo ratings yet
- Midterm Exam SolutionsDocument26 pagesMidterm Exam SolutionsShelaRamos100% (1)
- 263 HomeworkDocument153 pages263 HomeworkHimanshu Saikia JNo ratings yet
- 3.1 Least-Squares ProblemsDocument28 pages3.1 Least-Squares ProblemsGabo GarcíaNo ratings yet
- Numerical Linear Algebra With Applications SyllabusDocument2 pagesNumerical Linear Algebra With Applications SyllabusSankalp ChauhanNo ratings yet
- Mathematica PDFDocument3 pagesMathematica PDFAsanka AmarasingheNo ratings yet
- Vector and Matrix NormDocument17 pagesVector and Matrix NormpaivensolidsnakeNo ratings yet
- Generating FunctionsDocument8 pagesGenerating FunctionsRafael M. Rubio100% (1)
- Ordinary Differential Equations: y Xyyy yDocument15 pagesOrdinary Differential Equations: y Xyyy yAdrian GavrilaNo ratings yet
- Analysis On Manifold Via Laplacian CanzaniDocument114 pagesAnalysis On Manifold Via Laplacian CanzaniACCNo ratings yet
- Hilbert-Spaces MATH231B Appendix1of1Document28 pagesHilbert-Spaces MATH231B Appendix1of1Chernet TugeNo ratings yet
- 116 hw1Document5 pages116 hw1thermopolis3012No ratings yet
- Analysis2011 PDFDocument235 pagesAnalysis2011 PDFMirica Mihai AntonioNo ratings yet
- Expander Graphs: 4.1 Measures of ExpansionDocument51 pagesExpander Graphs: 4.1 Measures of ExpansionJasen liNo ratings yet
- Laplace EquationDocument4 pagesLaplace EquationRizwan Samor100% (1)
- The History of The Basel ProblemDocument13 pagesThe History of The Basel ProblemJohn SmithNo ratings yet
- Sobolev SpaceDocument15 pagesSobolev Spaceconmec.crplNo ratings yet
- Assignment 1Document6 pagesAssignment 1Matkabhai Bhai100% (1)
- Differential Geometry Syed Hassan Waqas PDFDocument69 pagesDifferential Geometry Syed Hassan Waqas PDFAHSAN JUTT100% (1)
- 1 S5 PDFDocument85 pages1 S5 PDF너굴No ratings yet
- Q A X X: Definition of Quadratic FormsDocument8 pagesQ A X X: Definition of Quadratic FormshodanitNo ratings yet
- Sylvester Criterion For Positive DefinitenessDocument4 pagesSylvester Criterion For Positive DefinitenessArlette100% (1)
- Histogram EqualizationDocument38 pagesHistogram Equalizationmanjudhas_5100% (1)
- Hopf Bifurcation Normal FormDocument3 pagesHopf Bifurcation Normal FormJohnv13100% (2)
- CHAPTER 6 NUmerical DifferentiationDocument6 pagesCHAPTER 6 NUmerical DifferentiationEdbert TulipasNo ratings yet
- Functions of Several Variables PDFDocument21 pagesFunctions of Several Variables PDFsuntararaajanNo ratings yet
- Linear Dynamical Systems - Course ReaderDocument414 pagesLinear Dynamical Systems - Course ReaderTraderCat SolarisNo ratings yet
- MargulisDocument7 pagesMargulisqbeecNo ratings yet
- Delay Differential EquationsDocument42 pagesDelay Differential EquationsPonnammal KuppusamyNo ratings yet
- Quantum Field Theory Solution To Exercise Sheet No. 9: Exercise 9.1: One Loop Renormalization of QED A)Document20 pagesQuantum Field Theory Solution To Exercise Sheet No. 9: Exercise 9.1: One Loop Renormalization of QED A)julian fischerNo ratings yet
- Module 2 Vector Spaces FundamentalsDocument33 pagesModule 2 Vector Spaces FundamentalsG MahendraNo ratings yet
- LusinDocument6 pagesLusinM ShahbazNo ratings yet
- Center Manifold ReductionDocument8 pagesCenter Manifold Reductionsunoval2013100% (2)
- Real Analysis - Homework Solutions: Chris Monico, May 2, 2013Document37 pagesReal Analysis - Homework Solutions: Chris Monico, May 2, 2013gustavoNo ratings yet
- Putnam Linear AlgebraDocument6 pagesPutnam Linear AlgebrainfinitesimalnexusNo ratings yet
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsFrom EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsNo ratings yet
- BrakingDocument19 pagesBrakingMohammad Umar RehmanNo ratings yet
- Drives SolutionsDocument4 pagesDrives SolutionsMohammad Umar RehmanNo ratings yet
- Power Distribution IITKDocument5 pagesPower Distribution IITKMohammad Umar RehmanNo ratings yet
- EEE-282N - S&S Quiz, U-1,2 - SolutionsDocument2 pagesEEE-282N - S&S Quiz, U-1,2 - SolutionsMohammad Umar RehmanNo ratings yet
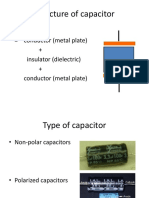
- Structure of Capacitor: - Capacitor Conductor (Metal Plate) + Insulator (Dielectric) + Conductor (Metal Plate)Document11 pagesStructure of Capacitor: - Capacitor Conductor (Metal Plate) + Insulator (Dielectric) + Conductor (Metal Plate)Mohammad Umar RehmanNo ratings yet
- Numerical Methods in ElectromagneticsDocument9 pagesNumerical Methods in ElectromagneticsMohammad Umar Rehman100% (1)
- Matrix YMDocument17 pagesMatrix YMOhwil100% (3)
- Ee 6365 Electrical Engineering Laboratory Manual: (Type Text)Document59 pagesEe 6365 Electrical Engineering Laboratory Manual: (Type Text)Mohammad Umar RehmanNo ratings yet
- Fem Notes Me623Document182 pagesFem Notes Me623Hirday SidhuNo ratings yet
- TOS Gen - Math2022Document4 pagesTOS Gen - Math2022LAARNI REBONGNo ratings yet
- Microsoft Word - 01 02 Circles 2Document21 pagesMicrosoft Word - 01 02 Circles 2madhuNo ratings yet
- Discrete Distributions: Bernoulli Random VariableDocument27 pagesDiscrete Distributions: Bernoulli Random VariableThapelo SebolaiNo ratings yet
- Formula Derivation: Stefan'S LawDocument7 pagesFormula Derivation: Stefan'S LawRitesh BhoiteNo ratings yet
- Water Is Flowing Into A Spherical Tank 24 M in Diameter at A Rate of 2 CuDocument18 pagesWater Is Flowing Into A Spherical Tank 24 M in Diameter at A Rate of 2 CuNicole SesbreñoNo ratings yet
- Gce Ms Mathematics Jan10 eDocument35 pagesGce Ms Mathematics Jan10 eJon RoweNo ratings yet
- Simplifying and Evaluating Algebraic Expressions: Looking BackDocument27 pagesSimplifying and Evaluating Algebraic Expressions: Looking BackthebtcircleNo ratings yet
- Calculus NotesDocument7 pagesCalculus Notesjistoni tanNo ratings yet
- Mathematics With A Calculator PDFDocument126 pagesMathematics With A Calculator PDFJoffrey MontallaNo ratings yet
- Ejercicios Transformaciones ElementalesDocument2 pagesEjercicios Transformaciones ElementalesMarco Alquicira BalderasNo ratings yet
- M - SC - Physics - 345 11 - Classical MechanicsDocument290 pagesM - SC - Physics - 345 11 - Classical MechanicsMubashar100% (1)
- Lab Work 1,2Document18 pagesLab Work 1,2Shehzad khanNo ratings yet
- 9.4 MCQ+FRQDocument14 pages9.4 MCQ+FRQmalikdoo5alNo ratings yet
- Quantum Formula SheetDocument47 pagesQuantum Formula SheetShailja Pujani100% (1)
- Work Sheet 03 - Edexcel - Pure 1Document5 pagesWork Sheet 03 - Edexcel - Pure 1Thaviksha BulathsinhalaNo ratings yet
- Eigenvalues and Eigenvectors - MATLAB EigDocument10 pagesEigenvalues and Eigenvectors - MATLAB EigAkash RamannNo ratings yet
- CCP Lab Manual Vtu 1semDocument20 pagesCCP Lab Manual Vtu 1semChetan Hiremath0% (1)
- Control of Mobile Robots: Linear SystemsDocument65 pagesControl of Mobile Robots: Linear Systemssonti11No ratings yet
- Differential Equations: A Dynamical Systems Approach To Theory and PracticeDocument553 pagesDifferential Equations: A Dynamical Systems Approach To Theory and PracticeNoe MartinezNo ratings yet
- STAT 5383 - Lab 1: Exploratory Tools For Time Series AnalysisDocument7 pagesSTAT 5383 - Lab 1: Exploratory Tools For Time Series AnalysisHofidisNo ratings yet
- X y X Y: Conic Sections/ConicsDocument2 pagesX y X Y: Conic Sections/ConicsVlad VizcondeNo ratings yet
- FINAL BOOK For Cal1Document260 pagesFINAL BOOK For Cal1Abdul Halil AbdullahNo ratings yet
- Kiran Kedlaya - A Is Less Than BDocument37 pagesKiran Kedlaya - A Is Less Than BDijkschneierNo ratings yet
- Littoral Mathematics Teachers Association: Multiple Choice Question Paper Instructions To CandidatesDocument6 pagesLittoral Mathematics Teachers Association: Multiple Choice Question Paper Instructions To CandidatesAlphonsius WongNo ratings yet
- The Matrix Cook BookDocument71 pagesThe Matrix Cook BookChristien MarieNo ratings yet
- All Chapters NoteDocument272 pagesAll Chapters NoteMike BelayNo ratings yet
- Optimization Toolbox: User's GuideDocument305 pagesOptimization Toolbox: User's GuideDivungoNo ratings yet
- 65 (B) Mathematics For ViDocument23 pages65 (B) Mathematics For Vi18-Mir Rayhan AlliNo ratings yet
- Geometri Ruang File 1Document4 pagesGeometri Ruang File 1Muhammad Isna SumaatmajaNo ratings yet