Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Solutions To Homework 4: Problem 1 (15 Points)Document15 pagesSolutions To Homework 4: Problem 1 (15 Points)joa91189100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- HW 6Document12 pagesHW 6Siva RamNo ratings yet
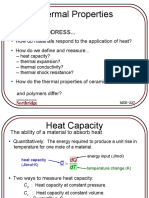
- Thermal Properties: Issues To Address..Document18 pagesThermal Properties: Issues To Address..Senthil Kumar PNo ratings yet
- G10 Lesson4 DLPDocument20 pagesG10 Lesson4 DLPAngeles, Mark Allen CNo ratings yet
- Gravitational WavesDocument16 pagesGravitational WavesGreg O'Brien100% (1)
- Danfoss GLY90RDa R134a 115 60Document5 pagesDanfoss GLY90RDa R134a 115 60MEN6100% (1)
- Elec TH 1 QA PDFDocument4 pagesElec TH 1 QA PDFGemalyn NacarioNo ratings yet
- MSDS 6. 33kv, 33 KV, PTDocument2 pagesMSDS 6. 33kv, 33 KV, PTRamu RamuNo ratings yet
- Fge 50117079 3315155 22-06-2023 0 NDocument2 pagesFge 50117079 3315155 22-06-2023 0 NVictor CarausNo ratings yet
- XL1509 DatasheetDocument13 pagesXL1509 DatasheetMantasPuskoriusNo ratings yet
- Motion in Two Dimensions (Physics)Document11 pagesMotion in Two Dimensions (Physics)GiovannaPacheco100% (1)
- Chetan Tangade Seminar ReportDocument14 pagesChetan Tangade Seminar ReportKarthik OberioNo ratings yet
- 30th International Physics OlympiadDocument5 pages30th International Physics OlympiadelsewhereNo ratings yet
- MIG200 J03 Connection DiagrameDocument1 pageMIG200 J03 Connection DiagramehosseinarevanNo ratings yet
- Electrical Engineering 2nd Sem AktuDocument6 pagesElectrical Engineering 2nd Sem AktuNerdy TechNo ratings yet
- IDC 3321703 100 MCQDocument24 pagesIDC 3321703 100 MCQjigarNo ratings yet
- DPP (54-57) 11th PQRS Physics WADocument7 pagesDPP (54-57) 11th PQRS Physics WAAyushJainNo ratings yet
- CTO 650 138 Current TransformerDocument3 pagesCTO 650 138 Current Transformersagar ramaniNo ratings yet
- Digital Insulation Tester: Empowering MeasurementDocument2 pagesDigital Insulation Tester: Empowering MeasurementPrashant gaurNo ratings yet
- B 2000 (Ovsyannikov) Plasma DiagnosticsDocument590 pagesB 2000 (Ovsyannikov) Plasma Diagnosticsutente489133No ratings yet
- Electrical 23D.2: Bus, Behaves WhenDocument7 pagesElectrical 23D.2: Bus, Behaves WhenAnonymous dqbb02DUhNo ratings yet
- PINNACLE Physics 2000mcq (Hindi English)Document309 pagesPINNACLE Physics 2000mcq (Hindi English)Rk SharmaNo ratings yet
- Ieee 444-1973Document82 pagesIeee 444-1973chipshareNo ratings yet
- BE8251 Basic Electrical and Electronics EngineeringDocument16 pagesBE8251 Basic Electrical and Electronics EngineeringPrabha PKNo ratings yet
- Timers, Time, Switches, Hour Meters & Supply MonitorsDocument24 pagesTimers, Time, Switches, Hour Meters & Supply MonitorsnogeshwarNo ratings yet
- Electric PotentialDocument12 pagesElectric PotentialCable PadcalNo ratings yet
- Ac 2008-1398: Introducing Excel Based Steam Table Calculations Into Thermodynamics CurriculumDocument19 pagesAc 2008-1398: Introducing Excel Based Steam Table Calculations Into Thermodynamics CurriculumSankar SasmalNo ratings yet
- Water Distribution System Analysis and Design Using EpanetDocument126 pagesWater Distribution System Analysis and Design Using EpanetMelvin De VeraNo ratings yet
- On Board Charging of Electric VehicleDocument11 pagesOn Board Charging of Electric Vehicleomkar chitnisNo ratings yet
- Questions On Unit I (Basics of Electromagnetics)Document2 pagesQuestions On Unit I (Basics of Electromagnetics)Thota Venkata Lakshmi Manasa 22120487101No ratings yet