
Automatic Control
Automatic Control
You might also like
- Control System Theory and Design: ECE 515 Class NotesDocument238 pagesControl System Theory and Design: ECE 515 Class NotesS AbishekNo ratings yet
- Introduction To Control Engineering: Andy Pomfret and Tim ClarkeDocument54 pagesIntroduction To Control Engineering: Andy Pomfret and Tim ClarkemmmNo ratings yet
- CAD, 3D Modeling, Engineering Analysis, and Prototype Experimentation PDFDocument254 pagesCAD, 3D Modeling, Engineering Analysis, and Prototype Experimentation PDFDan SorinNo ratings yet
- A-Z of Linux - 40 Essential Commands PDFDocument2 pagesA-Z of Linux - 40 Essential Commands PDFvladareanucatalindanNo ratings yet
- ISDS 555 - Fall - 2019Document10 pagesISDS 555 - Fall - 2019nehaNo ratings yet
- Comparison of Linux DistributionsDocument12 pagesComparison of Linux DistributionspoopooheadmeNo ratings yet
- Victor Skormin - Introduction To Automatic Control. 1-Linus Publications, Incorporated (2010)Document264 pagesVictor Skormin - Introduction To Automatic Control. 1-Linus Publications, Incorporated (2010)ZhiwuNo ratings yet
- Final Report Ip-1 PDFDocument106 pagesFinal Report Ip-1 PDFShoaib chishtyNo ratings yet
- Eet 3357Document101 pagesEet 3357maestromoanaNo ratings yet
- Modeling and Simulation of Mechatronic Systems Using SimscapeDocument42 pagesModeling and Simulation of Mechatronic Systems Using SimscapePavaniNo ratings yet
- Robust Adaptive Control of Switched Systems: Khalid El RifaiDocument158 pagesRobust Adaptive Control of Switched Systems: Khalid El RifaiMoh3nMoNo ratings yet
- (Lecture Notes in Control and Information Sciences 332) Shengyuan Xu, James Lam - Robust Control and Filtering of Singular Systems-Springer (2006)Document240 pages(Lecture Notes in Control and Information Sciences 332) Shengyuan Xu, James Lam - Robust Control and Filtering of Singular Systems-Springer (2006)ARNAB PALNo ratings yet
- Control System Theory and Design: ECE 515 Class NotesDocument61 pagesControl System Theory and Design: ECE 515 Class Notesmarll0020% (1)
- Structural Identification of Bridges: Development of An Integrated System For Continuous Dynamic Monitoring.Document156 pagesStructural Identification of Bridges: Development of An Integrated System For Continuous Dynamic Monitoring.Alberto LorenzonNo ratings yet
- (International Series On Microprocessor-Based and Intelligent Systems Engineering 27) Marco Ceccarelli (Auth.) - Fundamentals of Mechanics of Robotic Manipulation-Springer Netherlands (2004) PDFDocument322 pages(International Series On Microprocessor-Based and Intelligent Systems Engineering 27) Marco Ceccarelli (Auth.) - Fundamentals of Mechanics of Robotic Manipulation-Springer Netherlands (2004) PDFAnand RajendranNo ratings yet
- Introduction To Control SystemDocument126 pagesIntroduction To Control Systemmelkamuab16No ratings yet
- Fronczak, Reniers - Model-Based Systems Engineering - 4TC00 Dictaat 2014-2015 PDFDocument105 pagesFronczak, Reniers - Model-Based Systems Engineering - 4TC00 Dictaat 2014-2015 PDFKernel5No ratings yet
- Advanced Topics in Control Systems Theory IIDocument294 pagesAdvanced Topics in Control Systems Theory IICarlosNo ratings yet
- Control MethodDocument334 pagesControl MethodZelalem Girma0% (1)
- 436-431 MECHANICS 4-Mechanical Vibration-Lecture NotesDocument247 pages436-431 MECHANICS 4-Mechanical Vibration-Lecture Noteskulov1592No ratings yet
- Mechanical Vibration by Janusz KrodkiewskiDocument247 pagesMechanical Vibration by Janusz KrodkiewskimjlazoNo ratings yet
- Introduction To Controls: Chapter 1-5Document64 pagesIntroduction To Controls: Chapter 1-5BillChayangkulTanNo ratings yet
- An Introduction To Control Theory Applications With MatlabDocument152 pagesAn Introduction To Control Theory Applications With MatlabDimitris TzNo ratings yet
- Computer Systems For Automation and ContDocument497 pagesComputer Systems For Automation and Conttranglinhnguyen2003No ratings yet
- Process Modeling, Identificaion and ControlDocument20 pagesProcess Modeling, Identificaion and Controlluisagarcia366No ratings yet
- Final PaperDocument114 pagesFinal PaperGkkNo ratings yet
- EMM514 Control Engineering IIDocument120 pagesEMM514 Control Engineering IIKEVIN MUTURINo ratings yet
- 2012 Book RobotMotionAndControl2011Document425 pages2012 Book RobotMotionAndControl2011鄭至峻No ratings yet
- Kaddour Najim Control of Continuous Linear SystemsDocument11 pagesKaddour Najim Control of Continuous Linear SystemsChrislei RizzattiNo ratings yet
- Basic Control SystemDocument46 pagesBasic Control SystemdeadzzzzzzzzzzzzNo ratings yet
- Real Time Control EngineeringDocument192 pagesReal Time Control EngineeringMiguel100% (1)
- Control System Theory and DesignDocument290 pagesControl System Theory and DesignPitzi PitzoneNo ratings yet
- Mechanical Vibrations ميكا 71Document234 pagesMechanical Vibrations ميكا 71Tarek AbulailNo ratings yet
- EE5103 - 21 - 22 - Part IDocument161 pagesEE5103 - 21 - 22 - Part IFeiNo ratings yet
- Reliability TextDocument91 pagesReliability Textvivek sanrachanaNo ratings yet
- Modern ControlDocument23 pagesModern ControlekaNo ratings yet
- Sliding Mode Control of Semi Markovian Jump Systems 1St Edition Jiang Online Ebook Texxtbook Full Chapter PDFDocument69 pagesSliding Mode Control of Semi Markovian Jump Systems 1St Edition Jiang Online Ebook Texxtbook Full Chapter PDFgerardo.fields187100% (7)
- Textbook Intelligent Optimal Adaptive Control For Mechatronic Systems 1St Edition Marcin Szuster Ebook All Chapter PDFDocument53 pagesTextbook Intelligent Optimal Adaptive Control For Mechatronic Systems 1St Edition Marcin Szuster Ebook All Chapter PDFlisa.boland544100% (14)
- Analysis and Design of Hybrid Control Systems: Jörgen MalmborgDocument142 pagesAnalysis and Design of Hybrid Control Systems: Jörgen MalmborgbbwinarNo ratings yet
- Taos ThesisDocument165 pagesTaos ThesisTao YangNo ratings yet
- MECH365 Final LabDocument60 pagesMECH365 Final LabPeter LindsayNo ratings yet
- Principles of Spacecraft Control: Walter Fichter Ramin T. GeshnizjaniDocument202 pagesPrinciples of Spacecraft Control: Walter Fichter Ramin T. GeshnizjaniREANSNo ratings yet
- Rp Đồ Án 2 Hoài NgọcDocument88 pagesRp Đồ Án 2 Hoài NgọcHOÀI NGỌC THỊ VŨNo ratings yet
- Introduction to Nonlinear Control: Stability, Control Design, and EstimationFrom EverandIntroduction to Nonlinear Control: Stability, Control Design, and EstimationNo ratings yet
- Managing reverse logistics using system dynamics: A generic end-to-end approachFrom EverandManaging reverse logistics using system dynamics: A generic end-to-end approachNo ratings yet
- Structural Health MonitoringFrom EverandStructural Health MonitoringDaniel BalageasNo ratings yet
- Introduction to Stochastic Search and Optimization: Estimation, Simulation, and ControlFrom EverandIntroduction to Stochastic Search and Optimization: Estimation, Simulation, and ControlRating: 4 out of 5 stars4/5 (2)
- Nonlinear Traction Control Design for Parallel Hybrid VehiclesFrom EverandNonlinear Traction Control Design for Parallel Hybrid VehiclesNo ratings yet
- Communication and Control in Electric Power Systems: Applications of Parallel and Distributed ProcessingFrom EverandCommunication and Control in Electric Power Systems: Applications of Parallel and Distributed ProcessingNo ratings yet
- Prediction of Burnout: An Artificial Neural Network ApproachFrom EverandPrediction of Burnout: An Artificial Neural Network ApproachNo ratings yet
- Nano Mechanics and Materials: Theory, Multiscale Methods and ApplicationsFrom EverandNano Mechanics and Materials: Theory, Multiscale Methods and ApplicationsNo ratings yet
- Modeling Human-Structure Interaction Using a Controller SystemFrom EverandModeling Human-Structure Interaction Using a Controller SystemNo ratings yet
- Queueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science ApplicationsFrom EverandQueueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science ApplicationsRating: 5 out of 5 stars5/5 (1)
- Motherboard Types and FeaturesDocument6 pagesMotherboard Types and FeaturespaolkkaNo ratings yet
- Practice ExercisesDocument30 pagesPractice ExercisesKarlos RdgzNo ratings yet
- ConstraintsDocument31 pagesConstraintsVinay GargNo ratings yet
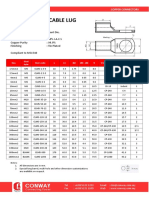
- Brochure - CLMS - Copper Cable Lug R1 PDFDocument1 pageBrochure - CLMS - Copper Cable Lug R1 PDFMuthu KumarNo ratings yet
- Heap Sort - JavatpointDocument16 pagesHeap Sort - JavatpointDr.Sakthivel SNo ratings yet
- 4d4fe32593743 - SiA 208RDocument8 pages4d4fe32593743 - SiA 208RManoj VattavilaNo ratings yet
- Jntuk r20 Unit-I Deep Learning Techniques (WWW - Jntumaterials.co - In)Document23 pagesJntuk r20 Unit-I Deep Learning Techniques (WWW - Jntumaterials.co - In)TARUN SAI PRADEEPNo ratings yet
- Concepts of Graphics and Illustration - CPINTLDocument172 pagesConcepts of Graphics and Illustration - CPINTLBa Cay TrucNo ratings yet
- BS7200 Operator Software For Digifas 7100 - 7200Document42 pagesBS7200 Operator Software For Digifas 7100 - 7200viniciusgdalatorreNo ratings yet
- My - Statement - 19 Jun, 2023 - 27 Jun, 2023 - 8458872769Document24 pagesMy - Statement - 19 Jun, 2023 - 27 Jun, 2023 - 8458872769Shani VermaNo ratings yet
- Control Circuit Wiring Variador V1000 YaskawaDocument8 pagesControl Circuit Wiring Variador V1000 YaskawaAndrés RamírezNo ratings yet
- h8140 Data Domain Extendedretention WPDocument14 pagesh8140 Data Domain Extendedretention WPhoanghiepNo ratings yet
- Process Manual: Saksham Jharkhand Kaushal Vikas Yojana (SJKVY) Pilot PhaseDocument50 pagesProcess Manual: Saksham Jharkhand Kaushal Vikas Yojana (SJKVY) Pilot PhaseArvind TiwariNo ratings yet
- sc1 PDFDocument7 pagessc1 PDFGajadhur AmishaNo ratings yet
- DVEO Simulcrypt Support - Application NoteDocument5 pagesDVEO Simulcrypt Support - Application NoteLaszlo ZoltanNo ratings yet
- AC7109 Rev D - Nadcap Audit Criteria For Coatings (To Be Used On or AFTER 18-Aug-13)Document9 pagesAC7109 Rev D - Nadcap Audit Criteria For Coatings (To Be Used On or AFTER 18-Aug-13)Ravi Kumar100% (1)
- Complete Set of Summative Test All Subjects For Grade 4Document20 pagesComplete Set of Summative Test All Subjects For Grade 4MJ ParkNo ratings yet
- Task 3 RubricDocument2 pagesTask 3 Rubricapi-535003994No ratings yet
- Dell Technologies SC420 DatasheetDocument3 pagesDell Technologies SC420 DatasheetNathalia MoralesNo ratings yet
- Iready System RequirementsDocument12 pagesIready System RequirementsAmiaNo ratings yet
- Quizizz Presentation 2015 12 21 PDFDocument20 pagesQuizizz Presentation 2015 12 21 PDFAmirOthmanNo ratings yet
- Data Analytics in SMES-OECDDocument45 pagesData Analytics in SMES-OECDcarogonherNo ratings yet
- Activity Template - Sprint Backlog (1) .XLSX 18-27-38 095Document4 pagesActivity Template - Sprint Backlog (1) .XLSX 18-27-38 095girithaNo ratings yet
- Digital ModulationDocument153 pagesDigital Modulationمحمود عبدالرحمن ابراهيمNo ratings yet
- Task Distribution Base On Gant ChartDocument5 pagesTask Distribution Base On Gant ChartJETHSALINE HIMANTOGNo ratings yet
- Information Systems in Global Business Today: © 2007 by Prentice HallDocument15 pagesInformation Systems in Global Business Today: © 2007 by Prentice HallpreetimgmNo ratings yet
- 21 CFR Part 11 ChecklistDocument6 pages21 CFR Part 11 Checklistved pNo ratings yet
























































































Download as pdf or txt
You might also like
- Control System Theory and Design: ECE 515 Class NotesDocument238 pagesControl System Theory and Design: ECE 515 Class NotesS AbishekNo ratings yet
- Introduction To Control Engineering: Andy Pomfret and Tim ClarkeDocument54 pagesIntroduction To Control Engineering: Andy Pomfret and Tim ClarkemmmNo ratings yet
- CAD, 3D Modeling, Engineering Analysis, and Prototype Experimentation PDFDocument254 pagesCAD, 3D Modeling, Engineering Analysis, and Prototype Experimentation PDFDan SorinNo ratings yet
- A-Z of Linux - 40 Essential Commands PDFDocument2 pagesA-Z of Linux - 40 Essential Commands PDFvladareanucatalindanNo ratings yet
- ISDS 555 - Fall - 2019Document10 pagesISDS 555 - Fall - 2019nehaNo ratings yet
- Comparison of Linux DistributionsDocument12 pagesComparison of Linux DistributionspoopooheadmeNo ratings yet
- Victor Skormin - Introduction To Automatic Control. 1-Linus Publications, Incorporated (2010)Document264 pagesVictor Skormin - Introduction To Automatic Control. 1-Linus Publications, Incorporated (2010)ZhiwuNo ratings yet
- Final Report Ip-1 PDFDocument106 pagesFinal Report Ip-1 PDFShoaib chishtyNo ratings yet
- Eet 3357Document101 pagesEet 3357maestromoanaNo ratings yet
- Modeling and Simulation of Mechatronic Systems Using SimscapeDocument42 pagesModeling and Simulation of Mechatronic Systems Using SimscapePavaniNo ratings yet
- Robust Adaptive Control of Switched Systems: Khalid El RifaiDocument158 pagesRobust Adaptive Control of Switched Systems: Khalid El RifaiMoh3nMoNo ratings yet
- (Lecture Notes in Control and Information Sciences 332) Shengyuan Xu, James Lam - Robust Control and Filtering of Singular Systems-Springer (2006)Document240 pages(Lecture Notes in Control and Information Sciences 332) Shengyuan Xu, James Lam - Robust Control and Filtering of Singular Systems-Springer (2006)ARNAB PALNo ratings yet
- Control System Theory and Design: ECE 515 Class NotesDocument61 pagesControl System Theory and Design: ECE 515 Class Notesmarll0020% (1)
- Structural Identification of Bridges: Development of An Integrated System For Continuous Dynamic Monitoring.Document156 pagesStructural Identification of Bridges: Development of An Integrated System For Continuous Dynamic Monitoring.Alberto LorenzonNo ratings yet
- (International Series On Microprocessor-Based and Intelligent Systems Engineering 27) Marco Ceccarelli (Auth.) - Fundamentals of Mechanics of Robotic Manipulation-Springer Netherlands (2004) PDFDocument322 pages(International Series On Microprocessor-Based and Intelligent Systems Engineering 27) Marco Ceccarelli (Auth.) - Fundamentals of Mechanics of Robotic Manipulation-Springer Netherlands (2004) PDFAnand RajendranNo ratings yet
- Introduction To Control SystemDocument126 pagesIntroduction To Control Systemmelkamuab16No ratings yet
- Fronczak, Reniers - Model-Based Systems Engineering - 4TC00 Dictaat 2014-2015 PDFDocument105 pagesFronczak, Reniers - Model-Based Systems Engineering - 4TC00 Dictaat 2014-2015 PDFKernel5No ratings yet
- Advanced Topics in Control Systems Theory IIDocument294 pagesAdvanced Topics in Control Systems Theory IICarlosNo ratings yet
- Control MethodDocument334 pagesControl MethodZelalem Girma0% (1)
- 436-431 MECHANICS 4-Mechanical Vibration-Lecture NotesDocument247 pages436-431 MECHANICS 4-Mechanical Vibration-Lecture Noteskulov1592No ratings yet
- Mechanical Vibration by Janusz KrodkiewskiDocument247 pagesMechanical Vibration by Janusz KrodkiewskimjlazoNo ratings yet
- Introduction To Controls: Chapter 1-5Document64 pagesIntroduction To Controls: Chapter 1-5BillChayangkulTanNo ratings yet
- An Introduction To Control Theory Applications With MatlabDocument152 pagesAn Introduction To Control Theory Applications With MatlabDimitris TzNo ratings yet
- Computer Systems For Automation and ContDocument497 pagesComputer Systems For Automation and Conttranglinhnguyen2003No ratings yet
- Process Modeling, Identificaion and ControlDocument20 pagesProcess Modeling, Identificaion and Controlluisagarcia366No ratings yet
- Final PaperDocument114 pagesFinal PaperGkkNo ratings yet
- EMM514 Control Engineering IIDocument120 pagesEMM514 Control Engineering IIKEVIN MUTURINo ratings yet
- 2012 Book RobotMotionAndControl2011Document425 pages2012 Book RobotMotionAndControl2011鄭至峻No ratings yet
- Kaddour Najim Control of Continuous Linear SystemsDocument11 pagesKaddour Najim Control of Continuous Linear SystemsChrislei RizzattiNo ratings yet
- Basic Control SystemDocument46 pagesBasic Control SystemdeadzzzzzzzzzzzzNo ratings yet
- Real Time Control EngineeringDocument192 pagesReal Time Control EngineeringMiguel100% (1)
- Control System Theory and DesignDocument290 pagesControl System Theory and DesignPitzi PitzoneNo ratings yet
- Mechanical Vibrations ميكا 71Document234 pagesMechanical Vibrations ميكا 71Tarek AbulailNo ratings yet
- EE5103 - 21 - 22 - Part IDocument161 pagesEE5103 - 21 - 22 - Part IFeiNo ratings yet
- Reliability TextDocument91 pagesReliability Textvivek sanrachanaNo ratings yet
- Modern ControlDocument23 pagesModern ControlekaNo ratings yet
- Sliding Mode Control of Semi Markovian Jump Systems 1St Edition Jiang Online Ebook Texxtbook Full Chapter PDFDocument69 pagesSliding Mode Control of Semi Markovian Jump Systems 1St Edition Jiang Online Ebook Texxtbook Full Chapter PDFgerardo.fields187100% (7)
- Textbook Intelligent Optimal Adaptive Control For Mechatronic Systems 1St Edition Marcin Szuster Ebook All Chapter PDFDocument53 pagesTextbook Intelligent Optimal Adaptive Control For Mechatronic Systems 1St Edition Marcin Szuster Ebook All Chapter PDFlisa.boland544100% (14)
- Analysis and Design of Hybrid Control Systems: Jörgen MalmborgDocument142 pagesAnalysis and Design of Hybrid Control Systems: Jörgen MalmborgbbwinarNo ratings yet
- Taos ThesisDocument165 pagesTaos ThesisTao YangNo ratings yet
- MECH365 Final LabDocument60 pagesMECH365 Final LabPeter LindsayNo ratings yet
- Principles of Spacecraft Control: Walter Fichter Ramin T. GeshnizjaniDocument202 pagesPrinciples of Spacecraft Control: Walter Fichter Ramin T. GeshnizjaniREANSNo ratings yet
- Rp Đồ Án 2 Hoài NgọcDocument88 pagesRp Đồ Án 2 Hoài NgọcHOÀI NGỌC THỊ VŨNo ratings yet
- Introduction to Nonlinear Control: Stability, Control Design, and EstimationFrom EverandIntroduction to Nonlinear Control: Stability, Control Design, and EstimationNo ratings yet
- Managing reverse logistics using system dynamics: A generic end-to-end approachFrom EverandManaging reverse logistics using system dynamics: A generic end-to-end approachNo ratings yet
- Structural Health MonitoringFrom EverandStructural Health MonitoringDaniel BalageasNo ratings yet
- Introduction to Stochastic Search and Optimization: Estimation, Simulation, and ControlFrom EverandIntroduction to Stochastic Search and Optimization: Estimation, Simulation, and ControlRating: 4 out of 5 stars4/5 (2)
- Nonlinear Traction Control Design for Parallel Hybrid VehiclesFrom EverandNonlinear Traction Control Design for Parallel Hybrid VehiclesNo ratings yet
- Communication and Control in Electric Power Systems: Applications of Parallel and Distributed ProcessingFrom EverandCommunication and Control in Electric Power Systems: Applications of Parallel and Distributed ProcessingNo ratings yet
- Prediction of Burnout: An Artificial Neural Network ApproachFrom EverandPrediction of Burnout: An Artificial Neural Network ApproachNo ratings yet
- Nano Mechanics and Materials: Theory, Multiscale Methods and ApplicationsFrom EverandNano Mechanics and Materials: Theory, Multiscale Methods and ApplicationsNo ratings yet
- Modeling Human-Structure Interaction Using a Controller SystemFrom EverandModeling Human-Structure Interaction Using a Controller SystemNo ratings yet
- Queueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science ApplicationsFrom EverandQueueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science ApplicationsRating: 5 out of 5 stars5/5 (1)
- Motherboard Types and FeaturesDocument6 pagesMotherboard Types and FeaturespaolkkaNo ratings yet
- Practice ExercisesDocument30 pagesPractice ExercisesKarlos RdgzNo ratings yet
- ConstraintsDocument31 pagesConstraintsVinay GargNo ratings yet
- Brochure - CLMS - Copper Cable Lug R1 PDFDocument1 pageBrochure - CLMS - Copper Cable Lug R1 PDFMuthu KumarNo ratings yet
- Heap Sort - JavatpointDocument16 pagesHeap Sort - JavatpointDr.Sakthivel SNo ratings yet
- 4d4fe32593743 - SiA 208RDocument8 pages4d4fe32593743 - SiA 208RManoj VattavilaNo ratings yet
- Jntuk r20 Unit-I Deep Learning Techniques (WWW - Jntumaterials.co - In)Document23 pagesJntuk r20 Unit-I Deep Learning Techniques (WWW - Jntumaterials.co - In)TARUN SAI PRADEEPNo ratings yet
- Concepts of Graphics and Illustration - CPINTLDocument172 pagesConcepts of Graphics and Illustration - CPINTLBa Cay TrucNo ratings yet
- BS7200 Operator Software For Digifas 7100 - 7200Document42 pagesBS7200 Operator Software For Digifas 7100 - 7200viniciusgdalatorreNo ratings yet
- My - Statement - 19 Jun, 2023 - 27 Jun, 2023 - 8458872769Document24 pagesMy - Statement - 19 Jun, 2023 - 27 Jun, 2023 - 8458872769Shani VermaNo ratings yet
- Control Circuit Wiring Variador V1000 YaskawaDocument8 pagesControl Circuit Wiring Variador V1000 YaskawaAndrés RamírezNo ratings yet
- h8140 Data Domain Extendedretention WPDocument14 pagesh8140 Data Domain Extendedretention WPhoanghiepNo ratings yet
- Process Manual: Saksham Jharkhand Kaushal Vikas Yojana (SJKVY) Pilot PhaseDocument50 pagesProcess Manual: Saksham Jharkhand Kaushal Vikas Yojana (SJKVY) Pilot PhaseArvind TiwariNo ratings yet
- sc1 PDFDocument7 pagessc1 PDFGajadhur AmishaNo ratings yet
- DVEO Simulcrypt Support - Application NoteDocument5 pagesDVEO Simulcrypt Support - Application NoteLaszlo ZoltanNo ratings yet
- AC7109 Rev D - Nadcap Audit Criteria For Coatings (To Be Used On or AFTER 18-Aug-13)Document9 pagesAC7109 Rev D - Nadcap Audit Criteria For Coatings (To Be Used On or AFTER 18-Aug-13)Ravi Kumar100% (1)
- Complete Set of Summative Test All Subjects For Grade 4Document20 pagesComplete Set of Summative Test All Subjects For Grade 4MJ ParkNo ratings yet
- Task 3 RubricDocument2 pagesTask 3 Rubricapi-535003994No ratings yet
- Dell Technologies SC420 DatasheetDocument3 pagesDell Technologies SC420 DatasheetNathalia MoralesNo ratings yet
- Iready System RequirementsDocument12 pagesIready System RequirementsAmiaNo ratings yet
- Quizizz Presentation 2015 12 21 PDFDocument20 pagesQuizizz Presentation 2015 12 21 PDFAmirOthmanNo ratings yet
- Data Analytics in SMES-OECDDocument45 pagesData Analytics in SMES-OECDcarogonherNo ratings yet
- Activity Template - Sprint Backlog (1) .XLSX 18-27-38 095Document4 pagesActivity Template - Sprint Backlog (1) .XLSX 18-27-38 095girithaNo ratings yet
- Digital ModulationDocument153 pagesDigital Modulationمحمود عبدالرحمن ابراهيمNo ratings yet
- Task Distribution Base On Gant ChartDocument5 pagesTask Distribution Base On Gant ChartJETHSALINE HIMANTOGNo ratings yet
- Information Systems in Global Business Today: © 2007 by Prentice HallDocument15 pagesInformation Systems in Global Business Today: © 2007 by Prentice HallpreetimgmNo ratings yet
- 21 CFR Part 11 ChecklistDocument6 pages21 CFR Part 11 Checklistved pNo ratings yet