
11 - AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction Mode
11 - AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction Mode
You might also like
- BL0683 6EJ517 Electronic Devices and SystemsDocument19 pagesBL0683 6EJ517 Electronic Devices and Systemskhan aliNo ratings yet
- Representative Static Load Models For TransientDocument10 pagesRepresentative Static Load Models For TransientNirmal mehtaNo ratings yet
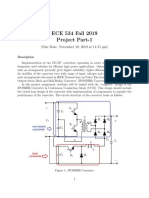
- ECE 534 Project 1 F19Document6 pagesECE 534 Project 1 F19JAY CHHEDANo ratings yet
- An Introduction To Sepic ConverterDocument2 pagesAn Introduction To Sepic Converterleemoh8190No ratings yet
- Modeling of Solar PV System Under Partial Shading Using Particle Swarm Optimization Based MPPTDocument7 pagesModeling of Solar PV System Under Partial Shading Using Particle Swarm Optimization Based MPPTAnonymous CUPykm6DZNo ratings yet
- Partially Shaded Operation of A Grid-Tied PV SystemDocument9 pagesPartially Shaded Operation of A Grid-Tied PV SystemheanbuNo ratings yet
- Multi LVL DC DC BoostDocument9 pagesMulti LVL DC DC BoostDurga PrathibhaNo ratings yet
- Literature Review For Automatic Power Factor CorrectionDocument7 pagesLiterature Review For Automatic Power Factor Correctionea6mkqw2No ratings yet
- The Effect of Shading With Different PV Array Configurations On The Grid-Connected PV SystemDocument6 pagesThe Effect of Shading With Different PV Array Configurations On The Grid-Connected PV SystemabdelbassetNo ratings yet
- A - Generalized - High - Gain - Multilevel - Inverter - For - Small - Scale - Solar - Photovoltaic - ApplicationsDocument15 pagesA - Generalized - High - Gain - Multilevel - Inverter - For - Small - Scale - Solar - Photovoltaic - ApplicationsJamal KhyatNo ratings yet
- Modeling of DC DC Converter PDFDocument6 pagesModeling of DC DC Converter PDFVishal AryaNo ratings yet
- PV BoostDocument6 pagesPV BoostlestherroqueNo ratings yet
- Design and Analysis of A Dual Input DC-DC Converter For Hybrid Electric VehicleDocument23 pagesDesign and Analysis of A Dual Input DC-DC Converter For Hybrid Electric Vehiclejanga vishwanathNo ratings yet
- LCL FilterDocument10 pagesLCL Filtersumiths32No ratings yet
- 2.3.2 Analysis of The Conversion Ratio M (D, K) PDFDocument10 pages2.3.2 Analysis of The Conversion Ratio M (D, K) PDFArmy Joel MarianoNo ratings yet
- Study and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationDocument17 pagesStudy and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationIOSRjournalNo ratings yet
- CUK ConverterDocument13 pagesCUK ConverterpakalagopalNo ratings yet
- Thyristor Controlled Series CompensatorDocument19 pagesThyristor Controlled Series Compensatorshivanagendra koya100% (2)
- Automatic Control of Street LightDocument63 pagesAutomatic Control of Street LightMani RaoNo ratings yet
- Speed and Position Control of DC Motor Using LabVIEW-IJRASETDocument8 pagesSpeed and Position Control of DC Motor Using LabVIEW-IJRASETIJRASETPublicationsNo ratings yet
- Power Factor Project PDFDocument5 pagesPower Factor Project PDFPritam100% (1)
- Report On HVDCDocument18 pagesReport On HVDCBARUN SINGHNo ratings yet
- Distributed Generation With ATP EMTP PDFDocument6 pagesDistributed Generation With ATP EMTP PDFCarlos Lino Rojas AgüeroNo ratings yet
- Lecture 02Document40 pagesLecture 02Ahmad ZaidNo ratings yet
- Investigation The Performance of The Various Types of Harmonic FiltersDocument8 pagesInvestigation The Performance of The Various Types of Harmonic FiltersAlfredo Lopez CordovaNo ratings yet
- Modeling Transformers With Internal Incipient FaultsDocument18 pagesModeling Transformers With Internal Incipient FaultsDebajyoti Mishra100% (1)
- AC-DC & DC-DC Converters For DC Motor Drives PDFDocument8 pagesAC-DC & DC-DC Converters For DC Motor Drives PDFaswardiNo ratings yet
- Power Electronics Final Year EEE Projects 2018 2019Document16 pagesPower Electronics Final Year EEE Projects 2018 2019PannerNo ratings yet
- Synopsis: "Hybrid Solar-Wind Charging Station For Electric Vehicle and Its Simulation"Document9 pagesSynopsis: "Hybrid Solar-Wind Charging Station For Electric Vehicle and Its Simulation"Mahesh ShendeNo ratings yet
- Raw 05 - MATLAB Simulation of Reactive Power Compensation (26-31)Document6 pagesRaw 05 - MATLAB Simulation of Reactive Power Compensation (26-31)qw erNo ratings yet
- Project Report EngineeringDocument48 pagesProject Report EngineeringSonu DhangarNo ratings yet
- Fulltext01 PDFDocument66 pagesFulltext01 PDFElenildo Oliveira da SilvaNo ratings yet
- Lecture-3: EE 407 Renewable Electrical Energy ResourcesDocument34 pagesLecture-3: EE 407 Renewable Electrical Energy ResourcesjameelahmadNo ratings yet
- Novel Switching Sequences For A Space Vector Modulated Three Level Inverter-LibreDocument11 pagesNovel Switching Sequences For A Space Vector Modulated Three Level Inverter-LibreHollie RosaNo ratings yet
- EE321 - Assignment #1 - Noise, SNR, and Power Spectral DensityDocument3 pagesEE321 - Assignment #1 - Noise, SNR, and Power Spectral DensityJOSHUA GABRIELNo ratings yet
- Fault Detection On Radial Power Distribution Systems Using Fuzzy LogicDocument8 pagesFault Detection On Radial Power Distribution Systems Using Fuzzy LogicDa DebebeNo ratings yet
- Control of HVDC Transmission System Based On MMCDocument22 pagesControl of HVDC Transmission System Based On MMCAnand Parakkat ParambilNo ratings yet
- Power Loss CalculationDocument7 pagesPower Loss CalculationDivya PagidimarriNo ratings yet
- IEEE STD 1547Document4 pagesIEEE STD 1547elchicogrisNo ratings yet
- Wireless Power Transfer SynopsisDocument3 pagesWireless Power Transfer Synopsisa d100% (1)
- Implementation of An Active Battery Balancer Using Fly-Back TransformerDocument4 pagesImplementation of An Active Battery Balancer Using Fly-Back TransformerDebdeep MondalNo ratings yet
- Two Reaction Theory of Salient Pole Synchronous AlternatorDocument4 pagesTwo Reaction Theory of Salient Pole Synchronous AlternatorAngel Mae AlsuaNo ratings yet
- Artificial Intelligence-Based Power Transformer He-1Document13 pagesArtificial Intelligence-Based Power Transformer He-1Diogo do Espírito SantoNo ratings yet
- Project ReportDocument95 pagesProject ReportArunodayaprojectsNo ratings yet
- Module Information Module Title Electric Drives and Control Module Code MMD2511Document4 pagesModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaNo ratings yet
- DC-DC ConvertersDocument8 pagesDC-DC ConvertersNuruddin MuktaruddinNo ratings yet
- Distributed Generation: Benefits, Issues and ChallengesDocument7 pagesDistributed Generation: Benefits, Issues and ChallengesGRENZE Scientific SocietyNo ratings yet
- PQ Unit 1Document21 pagesPQ Unit 1Ezhiln 0328sNo ratings yet
- Fast Methods For Transient Stability Prediction in Power SystemsDocument20 pagesFast Methods For Transient Stability Prediction in Power SystemslisusedNo ratings yet
- HVDC TransmissionDocument14 pagesHVDC TransmissionAxay ShahNo ratings yet
- Unit 5Document27 pagesUnit 5prashantpnd0780% (5)
- Electrical Machines 2Document328 pagesElectrical Machines 2Gyanesh GuptaNo ratings yet
- Pe 06 Ee12Document27 pagesPe 06 Ee12chinchouNo ratings yet
- Performance Analysis of Asymmetrical Cascaded H-Bridge Nine Level Inverter With Photovoltaic ArraysDocument4 pagesPerformance Analysis of Asymmetrical Cascaded H-Bridge Nine Level Inverter With Photovoltaic ArraysijsretNo ratings yet
- Power Electronic Inverter - ReportDocument9 pagesPower Electronic Inverter - ReportPrateek AgarwalNo ratings yet
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet


























































Download as pdf or txt
You might also like
- BL0683 6EJ517 Electronic Devices and SystemsDocument19 pagesBL0683 6EJ517 Electronic Devices and Systemskhan aliNo ratings yet
- Representative Static Load Models For TransientDocument10 pagesRepresentative Static Load Models For TransientNirmal mehtaNo ratings yet
- ECE 534 Project 1 F19Document6 pagesECE 534 Project 1 F19JAY CHHEDANo ratings yet
- An Introduction To Sepic ConverterDocument2 pagesAn Introduction To Sepic Converterleemoh8190No ratings yet
- Modeling of Solar PV System Under Partial Shading Using Particle Swarm Optimization Based MPPTDocument7 pagesModeling of Solar PV System Under Partial Shading Using Particle Swarm Optimization Based MPPTAnonymous CUPykm6DZNo ratings yet
- Partially Shaded Operation of A Grid-Tied PV SystemDocument9 pagesPartially Shaded Operation of A Grid-Tied PV SystemheanbuNo ratings yet
- Multi LVL DC DC BoostDocument9 pagesMulti LVL DC DC BoostDurga PrathibhaNo ratings yet
- Literature Review For Automatic Power Factor CorrectionDocument7 pagesLiterature Review For Automatic Power Factor Correctionea6mkqw2No ratings yet
- The Effect of Shading With Different PV Array Configurations On The Grid-Connected PV SystemDocument6 pagesThe Effect of Shading With Different PV Array Configurations On The Grid-Connected PV SystemabdelbassetNo ratings yet
- A - Generalized - High - Gain - Multilevel - Inverter - For - Small - Scale - Solar - Photovoltaic - ApplicationsDocument15 pagesA - Generalized - High - Gain - Multilevel - Inverter - For - Small - Scale - Solar - Photovoltaic - ApplicationsJamal KhyatNo ratings yet
- Modeling of DC DC Converter PDFDocument6 pagesModeling of DC DC Converter PDFVishal AryaNo ratings yet
- PV BoostDocument6 pagesPV BoostlestherroqueNo ratings yet
- Design and Analysis of A Dual Input DC-DC Converter For Hybrid Electric VehicleDocument23 pagesDesign and Analysis of A Dual Input DC-DC Converter For Hybrid Electric Vehiclejanga vishwanathNo ratings yet
- LCL FilterDocument10 pagesLCL Filtersumiths32No ratings yet
- 2.3.2 Analysis of The Conversion Ratio M (D, K) PDFDocument10 pages2.3.2 Analysis of The Conversion Ratio M (D, K) PDFArmy Joel MarianoNo ratings yet
- Study and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationDocument17 pagesStudy and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationIOSRjournalNo ratings yet
- CUK ConverterDocument13 pagesCUK ConverterpakalagopalNo ratings yet
- Thyristor Controlled Series CompensatorDocument19 pagesThyristor Controlled Series Compensatorshivanagendra koya100% (2)
- Automatic Control of Street LightDocument63 pagesAutomatic Control of Street LightMani RaoNo ratings yet
- Speed and Position Control of DC Motor Using LabVIEW-IJRASETDocument8 pagesSpeed and Position Control of DC Motor Using LabVIEW-IJRASETIJRASETPublicationsNo ratings yet
- Power Factor Project PDFDocument5 pagesPower Factor Project PDFPritam100% (1)
- Report On HVDCDocument18 pagesReport On HVDCBARUN SINGHNo ratings yet
- Distributed Generation With ATP EMTP PDFDocument6 pagesDistributed Generation With ATP EMTP PDFCarlos Lino Rojas AgüeroNo ratings yet
- Lecture 02Document40 pagesLecture 02Ahmad ZaidNo ratings yet
- Investigation The Performance of The Various Types of Harmonic FiltersDocument8 pagesInvestigation The Performance of The Various Types of Harmonic FiltersAlfredo Lopez CordovaNo ratings yet
- Modeling Transformers With Internal Incipient FaultsDocument18 pagesModeling Transformers With Internal Incipient FaultsDebajyoti Mishra100% (1)
- AC-DC & DC-DC Converters For DC Motor Drives PDFDocument8 pagesAC-DC & DC-DC Converters For DC Motor Drives PDFaswardiNo ratings yet
- Power Electronics Final Year EEE Projects 2018 2019Document16 pagesPower Electronics Final Year EEE Projects 2018 2019PannerNo ratings yet
- Synopsis: "Hybrid Solar-Wind Charging Station For Electric Vehicle and Its Simulation"Document9 pagesSynopsis: "Hybrid Solar-Wind Charging Station For Electric Vehicle and Its Simulation"Mahesh ShendeNo ratings yet
- Raw 05 - MATLAB Simulation of Reactive Power Compensation (26-31)Document6 pagesRaw 05 - MATLAB Simulation of Reactive Power Compensation (26-31)qw erNo ratings yet
- Project Report EngineeringDocument48 pagesProject Report EngineeringSonu DhangarNo ratings yet
- Fulltext01 PDFDocument66 pagesFulltext01 PDFElenildo Oliveira da SilvaNo ratings yet
- Lecture-3: EE 407 Renewable Electrical Energy ResourcesDocument34 pagesLecture-3: EE 407 Renewable Electrical Energy ResourcesjameelahmadNo ratings yet
- Novel Switching Sequences For A Space Vector Modulated Three Level Inverter-LibreDocument11 pagesNovel Switching Sequences For A Space Vector Modulated Three Level Inverter-LibreHollie RosaNo ratings yet
- EE321 - Assignment #1 - Noise, SNR, and Power Spectral DensityDocument3 pagesEE321 - Assignment #1 - Noise, SNR, and Power Spectral DensityJOSHUA GABRIELNo ratings yet
- Fault Detection On Radial Power Distribution Systems Using Fuzzy LogicDocument8 pagesFault Detection On Radial Power Distribution Systems Using Fuzzy LogicDa DebebeNo ratings yet
- Control of HVDC Transmission System Based On MMCDocument22 pagesControl of HVDC Transmission System Based On MMCAnand Parakkat ParambilNo ratings yet
- Power Loss CalculationDocument7 pagesPower Loss CalculationDivya PagidimarriNo ratings yet
- IEEE STD 1547Document4 pagesIEEE STD 1547elchicogrisNo ratings yet
- Wireless Power Transfer SynopsisDocument3 pagesWireless Power Transfer Synopsisa d100% (1)
- Implementation of An Active Battery Balancer Using Fly-Back TransformerDocument4 pagesImplementation of An Active Battery Balancer Using Fly-Back TransformerDebdeep MondalNo ratings yet
- Two Reaction Theory of Salient Pole Synchronous AlternatorDocument4 pagesTwo Reaction Theory of Salient Pole Synchronous AlternatorAngel Mae AlsuaNo ratings yet
- Artificial Intelligence-Based Power Transformer He-1Document13 pagesArtificial Intelligence-Based Power Transformer He-1Diogo do Espírito SantoNo ratings yet
- Project ReportDocument95 pagesProject ReportArunodayaprojectsNo ratings yet
- Module Information Module Title Electric Drives and Control Module Code MMD2511Document4 pagesModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaNo ratings yet
- DC-DC ConvertersDocument8 pagesDC-DC ConvertersNuruddin MuktaruddinNo ratings yet
- Distributed Generation: Benefits, Issues and ChallengesDocument7 pagesDistributed Generation: Benefits, Issues and ChallengesGRENZE Scientific SocietyNo ratings yet
- PQ Unit 1Document21 pagesPQ Unit 1Ezhiln 0328sNo ratings yet
- Fast Methods For Transient Stability Prediction in Power SystemsDocument20 pagesFast Methods For Transient Stability Prediction in Power SystemslisusedNo ratings yet
- HVDC TransmissionDocument14 pagesHVDC TransmissionAxay ShahNo ratings yet
- Unit 5Document27 pagesUnit 5prashantpnd0780% (5)
- Electrical Machines 2Document328 pagesElectrical Machines 2Gyanesh GuptaNo ratings yet
- Pe 06 Ee12Document27 pagesPe 06 Ee12chinchouNo ratings yet
- Performance Analysis of Asymmetrical Cascaded H-Bridge Nine Level Inverter With Photovoltaic ArraysDocument4 pagesPerformance Analysis of Asymmetrical Cascaded H-Bridge Nine Level Inverter With Photovoltaic ArraysijsretNo ratings yet
- Power Electronic Inverter - ReportDocument9 pagesPower Electronic Inverter - ReportPrateek AgarwalNo ratings yet
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet