Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Loss Models From Data To Decisions Solutions Manual SETDocument6 pagesLoss Models From Data To Decisions Solutions Manual SETPhilipp50% (2)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 1 Introduction, Installation, ActivationDocument10 pages1 Introduction, Installation, Activationabnaod5363No ratings yet
- 2012S1 Cosc 1301 5246Document10 pages2012S1 Cosc 1301 5246Christine LogueNo ratings yet
- Strategic Investment Plan ForDocument78 pagesStrategic Investment Plan Forapi-3833112No ratings yet
- SQL MaterialDocument78 pagesSQL MaterialKonda Reddy100% (1)
- Slaa837a FAQ Ultrasonic Sensing Technology For Water and Gas Flow Metering With MSP430FR604x MCUsDocument16 pagesSlaa837a FAQ Ultrasonic Sensing Technology For Water and Gas Flow Metering With MSP430FR604x MCUsA N ArunkumarNo ratings yet
- Sigma NESTDocument48 pagesSigma NESTBurak Mücahit YeşiltaşNo ratings yet
- ECU 4784 E4 (I7) - DS (112522) 20221129104459Document1 pageECU 4784 E4 (I7) - DS (112522) 20221129104459Mahmood MaqsoodNo ratings yet
- Ds 312Document233 pagesDs 312N PrasaddNo ratings yet
- Chapter 3: Processes: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocument44 pagesChapter 3: Processes: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionAnshika MishraNo ratings yet
- Informatica Workflow Using PMCMDDocument6 pagesInformatica Workflow Using PMCMDvam_1No ratings yet
- Haas TL Manual PDFDocument111 pagesHaas TL Manual PDFBogdan Zavadovschi100% (1)
- Linksys - Spa8000Document233 pagesLinksys - Spa8000DrugacijiBoracNo ratings yet
- Devendra DaveDocument6 pagesDevendra DaveDevendra DaveNo ratings yet
- AD229b Leaflet - PDF - SonoromDocument4 pagesAD229b Leaflet - PDF - Sonoromedgard pebe quevedoNo ratings yet
- EasYgen-1000 Series InstallationDocument53 pagesEasYgen-1000 Series InstallationRavi KumarNo ratings yet
- Birth Time Rectification (BTR) Using Ruling Planets (RP) MethodDocument2 pagesBirth Time Rectification (BTR) Using Ruling Planets (RP) MethodSammy Vaishampayan50% (2)
- FMCG Brands: Search Toolkit ForDocument29 pagesFMCG Brands: Search Toolkit FornareshsbcNo ratings yet
- 5G-NR K0, K1 & K2 For Time Domain DL & UL Resource AllocationDocument7 pages5G-NR K0, K1 & K2 For Time Domain DL & UL Resource AllocationRamy .. MarianNo ratings yet
- Fonseca ShethDocument2 pagesFonseca ShethbuenalocoNo ratings yet
- Virus BDocument23 pagesVirus BaltaminNo ratings yet
- Linux Device DriversDocument39 pagesLinux Device Driverscoolsam.sab100% (1)
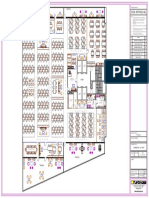
- Pyramid Axis - Furniture Layout - 04.08.22Document1 pagePyramid Axis - Furniture Layout - 04.08.22Manoj ShaluNo ratings yet
- PDF Maker Free For VtigercrmDocument13 pagesPDF Maker Free For VtigercrmFabio BugallaNo ratings yet
- Big Book of Python ScriptsDocument93 pagesBig Book of Python ScriptsOfi VegaNo ratings yet
- Casket Online Shop With CustomizationDocument37 pagesCasket Online Shop With CustomizationLy ByunNo ratings yet
- DocumentationDocument52 pagesDocumentationthanh_cdt01No ratings yet
- Desktop Engineering - 2011-08Document52 pagesDesktop Engineering - 2011-08Бушинкин ВладиславNo ratings yet