Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Ebook Ebook PDF Quantitative Finance A Simulation Based Introduction Using Excel PDFDocument41 pagesEbook Ebook PDF Quantitative Finance A Simulation Based Introduction Using Excel PDFjody.garton54598% (40)
- APLUS 121 User GuideDocument928 pagesAPLUS 121 User GuideJuan Pablo AriasNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Sternberg Press - May 2018Document4 pagesSternberg Press - May 2018ArtdataNo ratings yet
- Rotary Evaporator ManualDocument80 pagesRotary Evaporator ManualJesujoba100% (1)
- Complaint Handling SOPDocument10 pagesComplaint Handling SOPPrashant Khare100% (3)
- Comix 35Document6 pagesComix 35oriol.berges.bergadaNo ratings yet
- Dell Precision M4800 ParametryDocument2 pagesDell Precision M4800 ParametryWilsonLópezNo ratings yet
- Top 200 Newspapers in The World by The Polyglot MADDocument15 pagesTop 200 Newspapers in The World by The Polyglot MADnookmadNo ratings yet
- Globaltouch West Africa Limited A Case For Reinvestment Toward ProfitabilityDocument7 pagesGlobaltouch West Africa Limited A Case For Reinvestment Toward ProfitabilityDyaji Charles BalaNo ratings yet
- Law On Treaties Group 4Document51 pagesLaw On Treaties Group 4Seyre Eser ArymNo ratings yet
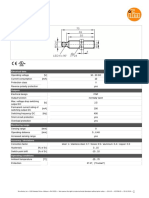
- Ig5788 03 - en UsDocument3 pagesIg5788 03 - en UsRachid SmailiNo ratings yet
- Marcelo Vs Sandiganbayan CAse Digest Rule 25Document3 pagesMarcelo Vs Sandiganbayan CAse Digest Rule 25Galilee RomasantaNo ratings yet
- I.T Engg Sem-VIDocument14 pagesI.T Engg Sem-VIMuvin KoshtiNo ratings yet
- Preliminary Full KrisDocument59 pagesPreliminary Full KrisKris Antonnete DaleonNo ratings yet
- Pfa Act 2011Document21 pagesPfa Act 2011Asif MerajNo ratings yet
- Catalog KiepeDocument6 pagesCatalog KiepeTacuNo ratings yet
- BitumenDocument4 pagesBitumenBangeen JalalNo ratings yet
- Excel Formulas and Functions ListDocument25 pagesExcel Formulas and Functions ListB15 Likitha100% (1)
- SYH Industria Ethernet Networking Manual 76Document607 pagesSYH Industria Ethernet Networking Manual 76fabianbritez8489100% (2)
- CAPF 2018 PressNote Eng-R PDFDocument11 pagesCAPF 2018 PressNote Eng-R PDFkuldeep singhNo ratings yet
- ISC Biotechnology 2026Document12 pagesISC Biotechnology 2026asNo ratings yet
- Pas Airpack 2 Pi 9046599 en GBDocument8 pagesPas Airpack 2 Pi 9046599 en GBForum PompieriiNo ratings yet
- Trait ApproachDocument21 pagesTrait ApproachzaidNo ratings yet
- Tiara Valencia: Work ExperienceDocument3 pagesTiara Valencia: Work ExperienceReysel MonteroNo ratings yet
- Transfer PricingDocument12 pagesTransfer PricingMark Lorenz100% (1)
- Sod EvaluatorDocument1 pageSod EvaluatorMarissa DrakeNo ratings yet
- Sports Economics 2017 1st Edition Berri Solutions ManualDocument8 pagesSports Economics 2017 1st Edition Berri Solutions Manualbrendabrownipnmktbzas100% (10)
- Thinklite TTL Camera Flash: For FujiDocument14 pagesThinklite TTL Camera Flash: For Fujimmonteiro_5No ratings yet
- Video Production TimelineDocument1 pageVideo Production TimelineLeisuread 2No ratings yet
- Info - Iec61000 4 33 (Ed1.0) enDocument8 pagesInfo - Iec61000 4 33 (Ed1.0) enUntung Yudho PrakosoNo ratings yet