Download as ppt, pdf, or txt
You might also like
- Introduction To Control Engineering: Andy Pomfret and Tim ClarkeDocument54 pagesIntroduction To Control Engineering: Andy Pomfret and Tim ClarkemmmNo ratings yet
- AEEC432 Rectilinear ControlDocument46 pagesAEEC432 Rectilinear ControlMelina Andrea ZiccorNo ratings yet
- EUI Injector Test Plan Worksheet MasterDocument14 pagesEUI Injector Test Plan Worksheet MasterDjebali MouradNo ratings yet
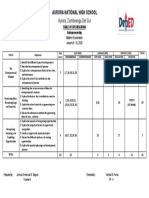
- TOS ENTREPRENEURSHIP Midterm ExamDocument1 pageTOS ENTREPRENEURSHIP Midterm Examjoshua baguio100% (2)
- Persepolis CHDocument3 pagesPersepolis CHapi-520766585No ratings yet
- Automatic Control TheoryDocument53 pagesAutomatic Control Theorysergiupogacian6303No ratings yet
- Paper UksimDocument6 pagesPaper Uksimsattanic666No ratings yet
- Adaptive Control Theory: Model Reference Adaptive SystemsDocument16 pagesAdaptive Control Theory: Model Reference Adaptive SystemsThanh NguyenNo ratings yet
- Automatic Control 2 NotesDocument38 pagesAutomatic Control 2 NotesÇağın OkuyucuNo ratings yet
- Report 1 - Week 1 - Group 5Document10 pagesReport 1 - Week 1 - Group 5Bảo ThiênNo ratings yet
- Overview of Mechatronic Systems ContentsDocument8 pagesOverview of Mechatronic Systems Contentsjerry4dNo ratings yet
- Practical Controller Design For DummiesDocument91 pagesPractical Controller Design For DummiesManraj Tatla100% (1)
- PIContoller Researchand DesignDocument14 pagesPIContoller Researchand DesignRASCOR VADERNo ratings yet
- System Identification, Estimation and FilteringDocument34 pagesSystem Identification, Estimation and FilteringDao AnhNo ratings yet
- Least-Squares Methods For System IdentificationDocument4 pagesLeast-Squares Methods For System IdentificationMarco FierimonteNo ratings yet
- Matlab Aided Control System Design - ConventionalDocument36 pagesMatlab Aided Control System Design - ConventionalGaacksonNo ratings yet
- Lab 12 Siso ToolDocument13 pagesLab 12 Siso Toolmidrees0200No ratings yet
- System Identification: - A Criterion, or Verification FunctionDocument14 pagesSystem Identification: - A Criterion, or Verification FunctionMona AliNo ratings yet
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemDocument6 pagesA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukeNo ratings yet
- Week 1 - Introduction To Control SystemsDocument14 pagesWeek 1 - Introduction To Control SystemsHane MinasalbasNo ratings yet
- Control Systems Engineering 5Document5 pagesControl Systems Engineering 5ANo ratings yet
- Introduction To Control SystemsDocument47 pagesIntroduction To Control SystemsMih Sy Santos-SilvaNo ratings yet
- Controls Infosheet and Sample Problems 0Document11 pagesControls Infosheet and Sample Problems 0Md Nur-A-Adam DonyNo ratings yet
- Control SystemsDocument96 pagesControl SystemsDr. Gollapalli NareshNo ratings yet
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatNo ratings yet
- Diseño-Guia 6 (PID Controller)Document8 pagesDiseño-Guia 6 (PID Controller)RhinometalI&CNo ratings yet
- Lab 5 - Controls and Feedback: BackgroundDocument6 pagesLab 5 - Controls and Feedback: BackgroundABamisheNo ratings yet
- Introduction 23Document16 pagesIntroduction 23Ggfgsgege GegsgsNo ratings yet
- MSE 490 Final Project PaperDocument21 pagesMSE 490 Final Project PaperKjellSadowskiNo ratings yet
- Control Systems Work PrincipleDocument8 pagesControl Systems Work Principleabdulla qaisNo ratings yet
- EE5101 Linear Systems Project Report: Semester - I, 2010/11Document22 pagesEE5101 Linear Systems Project Report: Semester - I, 2010/11Jie RongNo ratings yet
- Automatic Control Theory: A Course - Used For Analyzing and Designing A Automatic Control SystemDocument53 pagesAutomatic Control Theory: A Course - Used For Analyzing and Designing A Automatic Control SystemMeet VekariaNo ratings yet
- Lecture 3-Transfer Functions v2.0Document21 pagesLecture 3-Transfer Functions v2.0bayan.life14No ratings yet
- Trajectory Tracking Control of Ball and Plate System Based On Auto-Disturbance Rejection ControllerDocument6 pagesTrajectory Tracking Control of Ball and Plate System Based On Auto-Disturbance Rejection ControllerAyushman BaruaNo ratings yet
- Matlab and Simulink For Control SystemDocument35 pagesMatlab and Simulink For Control SystemLakshmiNo ratings yet
- System Identification and Modeling For Interacting and Non-Interacting Tank Systems Using Intelligent TechniquesDocument15 pagesSystem Identification and Modeling For Interacting and Non-Interacting Tank Systems Using Intelligent TechniquesMandy DiazNo ratings yet
- Ambo University: Regulation and ControlDocument20 pagesAmbo University: Regulation and ControlFikadu EshetuNo ratings yet
- Automatic Control Theory: A Course - Used For Analyzing and Designing A Automatic Control SystemDocument53 pagesAutomatic Control Theory: A Course - Used For Analyzing and Designing A Automatic Control SystemOmar DawaghrehNo ratings yet
- SallyubusDocument61 pagesSallyubusravindra898233No ratings yet
- 10 - Control System DesignDocument258 pages10 - Control System Designlordsolrac100% (1)
- Mak 449 IntroductionDocument11 pagesMak 449 IntroductionMurat ŞahinNo ratings yet
- System Identifiction of Servo RigDocument29 pagesSystem Identifiction of Servo Rigkarthikkumar411No ratings yet
- Key Elements of MechatronicsDocument14 pagesKey Elements of Mechatronicsmatininamdar50% (2)
- Unit-III - Root LocusDocument67 pagesUnit-III - Root LocusRachana GadeNo ratings yet
- Fault Detection of PM Synchronous Motor Via Modulating FunctionsDocument6 pagesFault Detection of PM Synchronous Motor Via Modulating Functionsjithesh87No ratings yet
- Basic Terminologies in Control System SystemDocument8 pagesBasic Terminologies in Control System SystemPandimadevi GanesanNo ratings yet
- Control 2021 UngappedDocument58 pagesControl 2021 Ungapped周暐凱No ratings yet
- Process Identification (PDC Report) PDFDocument20 pagesProcess Identification (PDC Report) PDFGunjan BishtNo ratings yet
- Fault Detection Based On Observer For Nonlinear Dynamic Power SystemDocument8 pagesFault Detection Based On Observer For Nonlinear Dynamic Power SystemAbdulazeez Ayomide AdebimpeNo ratings yet
- Mechatronic Systems Design: Mohammed AhmedDocument54 pagesMechatronic Systems Design: Mohammed AhmedShivam Kumar ShrivastavaNo ratings yet
- PID Control Experiment: Mechanical Engineering LabDocument4 pagesPID Control Experiment: Mechanical Engineering LabFreddy A. SanchezNo ratings yet
- Control System EngineeringDocument125 pagesControl System Engineeringcüneyt şanNo ratings yet
- Machine Problem 4Document12 pagesMachine Problem 4JERUELNo ratings yet
- Implementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicDocument4 pagesImplementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicJessica RossNo ratings yet
- Mechatronics NotesDocument90 pagesMechatronics NotesSanskar AgrawalNo ratings yet
- Lab 3 ReportDocument33 pagesLab 3 ReportdasdasdNo ratings yet
- Me 363 - GhonlineDocument81 pagesMe 363 - GhonlineEmmanuel AmoakoNo ratings yet
- Advanced Process Control10.5923.j.control.20130301.03Document9 pagesAdvanced Process Control10.5923.j.control.20130301.03essakkirajm19902116No ratings yet
- LCS Lab 3Document11 pagesLCS Lab 3Waleed RazzaqNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Benesty-Gänsler2004 Article NewInsightsIntoTheRLSAlgorithmDocument11 pagesBenesty-Gänsler2004 Article NewInsightsIntoTheRLSAlgorithmMelina Andrea ZiccorNo ratings yet
- Benesty-Gänsler2004 Article NewInsightsIntoTheRLSAlgorithmDocument9 pagesBenesty-Gänsler2004 Article NewInsightsIntoTheRLSAlgorithmMelina Andrea ZiccorNo ratings yet
- Low-Complexity Variable Forgetting Factor Techniques For RLS Algorithms in Interference Rejection ApplicationsDocument11 pagesLow-Complexity Variable Forgetting Factor Techniques For RLS Algorithms in Interference Rejection ApplicationsMelina Andrea ZiccorNo ratings yet
- Dspic33 Controllers With Mplab C30 Compiler: Simon Re Rucha (Res@Isibrno - CZ)Document60 pagesDspic33 Controllers With Mplab C30 Compiler: Simon Re Rucha (Res@Isibrno - CZ)Melina Andrea ZiccorNo ratings yet
- Project 2Document3 pagesProject 2Melina Andrea ZiccorNo ratings yet
- ExhibitorlistDocument8 pagesExhibitorlistHDSC ChemicalsNo ratings yet
- Mcgregor'S Theory X and Theory YDocument11 pagesMcgregor'S Theory X and Theory YMuhammad MurtazaNo ratings yet
- Ceha PDFDocument17 pagesCeha PDFMIGUELNo ratings yet
- List PPB Open 20221125Document8 pagesList PPB Open 20221125martaNo ratings yet
- CLC 12 - Capstone Draft Proposal WorksheetDocument3 pagesCLC 12 - Capstone Draft Proposal Worksheetapi-634204531No ratings yet
- CPM Guidelines PDFDocument538 pagesCPM Guidelines PDFVivek KumarNo ratings yet
- Conceptual Framework of Performance Management System For Construction Companies in IndonesiaDocument8 pagesConceptual Framework of Performance Management System For Construction Companies in IndonesiaphanthanhtrungNo ratings yet
- Deloitte - Wikipedia, The Free EncyclopediaDocument9 pagesDeloitte - Wikipedia, The Free Encyclopediakimmu5100% (1)
- Wind LoadDocument13 pagesWind LoadHimani NagarNo ratings yet
- Hydraulics Calculations and Field Application of Radial Jet DrillingDocument11 pagesHydraulics Calculations and Field Application of Radial Jet DrillingAnonymous VNu3ODGavNo ratings yet
- Clinical GoalsDocument13 pagesClinical GoalsHycient PaulNo ratings yet
- 10.AGA XQ1705 - AGA Report No.9 - Measurement of Gas by Multipath Ultrasonic Meters PDFDocument15 pages10.AGA XQ1705 - AGA Report No.9 - Measurement of Gas by Multipath Ultrasonic Meters PDFhendry_hdwNo ratings yet
- Towards A Model of Talent Development in Physical EducationDocument7 pagesTowards A Model of Talent Development in Physical Educationnariman narimanNo ratings yet
- Usb Cam LogDocument2 pagesUsb Cam LogDami NaimuniNo ratings yet
- Sex OnlineDocument15 pagesSex OnlineAlessandro ZarrellaNo ratings yet
- What Is Pressure SwitchDocument2 pagesWhat Is Pressure Switchtetsa zangetsuNo ratings yet
- Asset Integrity Directive PDFDocument25 pagesAsset Integrity Directive PDFLuke Fielding100% (2)
- Business Ethics 1Document15 pagesBusiness Ethics 1Nikita VithlaniNo ratings yet
- DD Series Guide Rod Diesel Pile Hammer D Series Diesel Pile HammerDocument7 pagesDD Series Guide Rod Diesel Pile Hammer D Series Diesel Pile HammerMuqorobinNo ratings yet
- Biofuels Annual - Tokyo - Japan - JA2022-0109Document19 pagesBiofuels Annual - Tokyo - Japan - JA2022-0109magijNo ratings yet
- Class 10 Economics PDFDocument104 pagesClass 10 Economics PDFanirudhNo ratings yet
- Bluetooth Hands Free Car Kit Audio Compactpact: Installation Instructions & Operating ManualDocument48 pagesBluetooth Hands Free Car Kit Audio Compactpact: Installation Instructions & Operating ManualIonut RabaNo ratings yet
- Liebert - CRV Series Air Conditioner User Manual: V1.4 Revision Date May 28, 2012 BOM 31011886Document79 pagesLiebert - CRV Series Air Conditioner User Manual: V1.4 Revision Date May 28, 2012 BOM 31011886Dam Ngoc KienNo ratings yet
- Enamelled Copper WireDocument8 pagesEnamelled Copper WireNNN MMMNo ratings yet
- PDMS Course SyllabusDocument3 pagesPDMS Course SyllabusBalu MuruganNo ratings yet
- Portland Slag Cement - Specification: Indian StandardDocument11 pagesPortland Slag Cement - Specification: Indian Standardদেবীসা দুর্গা সিনহাNo ratings yet
- Ipv6 I RipngDocument138 pagesIpv6 I RipngMarko MiticNo ratings yet