Download as pdf or txt
You might also like
- Dark Days at Sunnyvale Can Teamwork Part The CloudsDocument3 pagesDark Days at Sunnyvale Can Teamwork Part The CloudsAssignmentLab.com100% (1)
- Module 4 TestDocument3 pagesModule 4 TestJon100% (4)
- Tec. Qx. Russell Taylor HumeralDocument32 pagesTec. Qx. Russell Taylor HumeralAlvaro_086No ratings yet
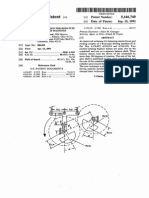
- HAARP PatentDocument12 pagesHAARP PatentGordon DuffNo ratings yet
- Lesson Plans AngerDocument11 pagesLesson Plans Angerapi-355586759100% (1)
- Sample Individual Professional Development Plan (IPDP) GoalsDocument2 pagesSample Individual Professional Development Plan (IPDP) Goalskothanzawoo1979100% (6)
- Ieee On TorontoDocument4 pagesIeee On TorontojonathanmartinNo ratings yet
- Zensol - OLTC Diagnosis Guide PDFDocument36 pagesZensol - OLTC Diagnosis Guide PDFsurag1982No ratings yet
- Micro/bit: Control Vectorial de Motores Síncronos Mediante DSPDocument8 pagesMicro/bit: Control Vectorial de Motores Síncronos Mediante DSPvladialvarezNo ratings yet
- Fundamental of Optical Fiber: B F O C SDocument13 pagesFundamental of Optical Fiber: B F O C Sfaisal7729No ratings yet
- 2840Document231 pages2840Nachawon PrasongthamNo ratings yet
- 20-32 Quantitative Prediction of Transformation Hardening in Steels PDFDocument13 pages20-32 Quantitative Prediction of Transformation Hardening in Steels PDFUlises Quintana CarhuanchoNo ratings yet
- Us 5146749Document6 pagesUs 5146749Juan Sebastian AguirreNo ratings yet
- L09 - Annale UDJG 2006 Fascicula VDocument6 pagesL09 - Annale UDJG 2006 Fascicula VCarlos ArenasNo ratings yet
- Travelling Waves MethodsDocument2 pagesTravelling Waves MethodssbuesoNo ratings yet
- Studies of The Motion of The Brain at A Suddenly Applied Rotation of The SkullDocument8 pagesStudies of The Motion of The Brain at A Suddenly Applied Rotation of The SkullDeepsNo ratings yet
- (1987) Bartlett, John T. - Process Simulation and Optimization Using MetsimDocument12 pages(1987) Bartlett, John T. - Process Simulation and Optimization Using MetsimLuis La TorreNo ratings yet
- United States Patent (191: Bieniosek (45) Date of Patent: May 23, 1989Document4 pagesUnited States Patent (191: Bieniosek (45) Date of Patent: May 23, 1989harishkumarsinghNo ratings yet
- Arpita Sharma Assignment 5Document9 pagesArpita Sharma Assignment 5Ritesh SinghNo ratings yet
- United States Patent (191: (11) Patent Number: (45) Date of PatentDocument5 pagesUnited States Patent (191: (11) Patent Number: (45) Date of PatentSalmanPashaNo ratings yet
- Maylab Impt2 PDFDocument7 pagesMaylab Impt2 PDFhulkco2No ratings yet
- Io Op Waveform of CE AmplifierDocument4 pagesIo Op Waveform of CE AmplifierTapobroto ChatterjeeNo ratings yet
- Fast Bus Transfer PerpectiveDocument9 pagesFast Bus Transfer PerpectiveAnonymous BBX2E87aHNo ratings yet
- Consumer Online PrivacyDocument14 pagesConsumer Online Privacymabelle901No ratings yet
- ApoorvaDocument25 pagesApoorvaSiddhant GuptaNo ratings yet
- Ieee No. 3, Computer Overcurrent Relay I E E E Commit'Tee Report"Document9 pagesIeee No. 3, Computer Overcurrent Relay I E E E Commit'Tee Report"rockNo ratings yet
- A General Unified Approach To Modelling Switching-Converter Power StagesDocument14 pagesA General Unified Approach To Modelling Switching-Converter Power StagesalucardlipknotNo ratings yet
- Parcol Noise ManualDocument30 pagesParcol Noise Manualanis_2011No ratings yet
- Society: Mining Engineers AimeDocument6 pagesSociety: Mining Engineers Aimekr4ntNo ratings yet
- An Architecture For Autism Concepts of DDocument22 pagesAn Architecture For Autism Concepts of DvitoriavaleiroNo ratings yet
- Iso 5348-1998Document18 pagesIso 5348-1998Tasawwur Tahir100% (1)
- Sample System For Three Phase Short Circuit CalculationDocument9 pagesSample System For Three Phase Short Circuit CalculationCOROMOTOUNINo ratings yet
- Basic Electronics Lab ManualDocument100 pagesBasic Electronics Lab Manualalkeshkhatri87% (15)
- Source Dyuver: R. G. HumphreyDocument4 pagesSource Dyuver: R. G. HumphreydrivinerNo ratings yet
- Structural Optimization of Landing Gears Using STARSTRUC: A.M. Elsaie R. Santillan, JRDocument8 pagesStructural Optimization of Landing Gears Using STARSTRUC: A.M. Elsaie R. Santillan, JRManoj Paul JohnNo ratings yet
- MB0047Document35 pagesMB0047abhishek13481No ratings yet
- United States Patent (191 4,927,800: Nishiki Et AlDocument7 pagesUnited States Patent (191 4,927,800: Nishiki Et AlchecolonoskiNo ratings yet
- GPSG 1000 OpsDocument211 pagesGPSG 1000 OpsjuanNo ratings yet
- United States Patent (19) : Murata Et Al. (11) Patent NumberDocument12 pagesUnited States Patent (19) : Murata Et Al. (11) Patent NumberCatanescu Alexandru-LaurentiuNo ratings yet
- CEH v8 Labs Module 00 PDFDocument4 pagesCEH v8 Labs Module 00 PDFBeenish HabibNo ratings yet
- 9305 20-80 KVA Users and Installation Manual 1015543D GBDocument40 pages9305 20-80 KVA Users and Installation Manual 1015543D GBFahd AhmedNo ratings yet
- Alt-O. : Indlvlduelly /@Document7 pagesAlt-O. : Indlvlduelly /@drivinerNo ratings yet
- Crime Report Management SystemDocument49 pagesCrime Report Management Systemsaranbalaji22No ratings yet
- Goodman SnoopyProtocolDocument8 pagesGoodman SnoopyProtocolKenanMahmutovićNo ratings yet
- Shell Omala S2 G 2202Document2 pagesShell Omala S2 G 2202Sholhan AzizNo ratings yet
- United States Patent (19) : Gray, SRDocument7 pagesUnited States Patent (19) : Gray, SRMary AndersonNo ratings yet
- Us 3995557Document6 pagesUs 3995557drive2345No ratings yet
- 23-Isolation of Torsional Vibrations in Rotating Machinery - Frs PDFDocument20 pages23-Isolation of Torsional Vibrations in Rotating Machinery - Frs PDFchetan_thakur4278No ratings yet
- Wastewater Treatment DissertationDocument8 pagesWastewater Treatment DissertationHelpWithPapersPhoenix100% (1)
- Shell Gadus S3 V220C 2: Performance, Features & Benefits Main ApplicationsDocument2 pagesShell Gadus S3 V220C 2: Performance, Features & Benefits Main ApplicationsGabby HanganuNo ratings yet
- 3-Analytical Techniques For Evaluation of Compressor-Manifold Response - Jcw&FrsDocument10 pages3-Analytical Techniques For Evaluation of Compressor-Manifold Response - Jcw&FrsshaffetiNo ratings yet
- Thinc - Aloud: - Volume IiDocument13 pagesThinc - Aloud: - Volume Iipushkarsingh27No ratings yet
- Hydrocarbonate Reservoir Characterization Constrained To 3D Seismic AttributesDocument10 pagesHydrocarbonate Reservoir Characterization Constrained To 3D Seismic AttributesseanmohdNo ratings yet
- Manual Del Usuario Parlantes Altec LansingDocument24 pagesManual Del Usuario Parlantes Altec LansingborigueNo ratings yet
- Study of Accelerating Torque Requirements of A Reciprocating CompDocument7 pagesStudy of Accelerating Torque Requirements of A Reciprocating CompannaNo ratings yet
- ¿J Fowuv C'ansn SNR-RW: F Íled April 23, 1943Document8 pages¿J Fowuv C'ansn SNR-RW: F Íled April 23, 1943sorin.dragosNo ratings yet
- Python Machine Learning: Using Scikit Learn, TensorFlow, PyTorch, and Keras, an Introductory Journey into Machine Learning, Deep Learning, Data Analysis, Algorithms, and Data ScienceFrom EverandPython Machine Learning: Using Scikit Learn, TensorFlow, PyTorch, and Keras, an Introductory Journey into Machine Learning, Deep Learning, Data Analysis, Algorithms, and Data ScienceNo ratings yet
- Automotive Equipment Usage and Repair StrategiesFrom EverandAutomotive Equipment Usage and Repair StrategiesRating: 5 out of 5 stars5/5 (1)
- The SAGES Manual of Robotic SurgeryFrom EverandThe SAGES Manual of Robotic SurgeryAnkit D. PatelNo ratings yet
- Assessing and Improving Prediction and Classification: Theory and Algorithms in C++From EverandAssessing and Improving Prediction and Classification: Theory and Algorithms in C++No ratings yet
- Systems Design for Remote HealthcareFrom EverandSystems Design for Remote HealthcareKoushik MaharatnaNo ratings yet
- Evolutionary Algorithms and Neural Networks: Theory and ApplicationsFrom EverandEvolutionary Algorithms and Neural Networks: Theory and ApplicationsNo ratings yet
- Challenges and Trends in Multimodal Fall Detection for HealthcareFrom EverandChallenges and Trends in Multimodal Fall Detection for HealthcareHiram PonceNo ratings yet
- Java Lab ManualDocument53 pagesJava Lab ManualAlaa TelpNo ratings yet
- Resume 5-23Document2 pagesResume 5-23api-666699275No ratings yet
- Articles: A, An, The: Grammar QuizDocument2 pagesArticles: A, An, The: Grammar QuizAngela RodríguezNo ratings yet
- Ralph Bunche Application PDFDocument3 pagesRalph Bunche Application PDFAndre AndersonNo ratings yet
- Difficulty Index Table (P) : Range of P InterpretationDocument5 pagesDifficulty Index Table (P) : Range of P InterpretationCharles Vincent DavidNo ratings yet
- Result Tet Batch 15 (6 Feb 2024)Document1 pageResult Tet Batch 15 (6 Feb 2024)tenhero92No ratings yet
- Course Guide: ME463 - Machine Design 2Document4 pagesCourse Guide: ME463 - Machine Design 2Christian Breth BurgosNo ratings yet
- AgileDocument152 pagesAgileraviam100% (4)
- Formal Lab Report Rubric Grades 9-12 Science Content No AbstractDocument3 pagesFormal Lab Report Rubric Grades 9-12 Science Content No Abstractapi-223847943No ratings yet
- Orientation To MeDocument9 pagesOrientation To MeJohn Paul Quevedo JrNo ratings yet
- Title: Celebration of The 2015 High School Intramurals RationaleDocument8 pagesTitle: Celebration of The 2015 High School Intramurals RationaleAlex Abonales DumandanNo ratings yet
- Applying For Visitor Visa (Temporary Resident Visa - IMM 5256)Document20 pagesApplying For Visitor Visa (Temporary Resident Visa - IMM 5256)Metha DawnNo ratings yet
- Iso 9000 - Quality HandbookDocument331 pagesIso 9000 - Quality HandbookJavier Pozo Santana92% (13)
- Chapter 1 - Types & Components of A Computer SystemDocument8 pagesChapter 1 - Types & Components of A Computer SystemMenna EissaNo ratings yet
- Physical Education 7Document7 pagesPhysical Education 7Junar AlarconNo ratings yet
- How To Teach Ordinal NumbersDocument5 pagesHow To Teach Ordinal NumbersPranjyoti SaikiaNo ratings yet
- Dia de Los MuertosDocument7 pagesDia de Los Muertosapi-423105147No ratings yet
- Social Science 100 Questionnaire UNITIDocument3 pagesSocial Science 100 Questionnaire UNITIAishah BelaNo ratings yet
- Chapter 1 Final (Group 1)Document8 pagesChapter 1 Final (Group 1)Lara BernardoNo ratings yet
- eALSyl OrienMusicDocument25 pageseALSyl OrienMusicLeague of fam0usNo ratings yet
- 2 Bejarano Benko - White Boards and PainDocument1 page2 Bejarano Benko - White Boards and Painapi-344178960No ratings yet
- Assertion ReasonDocument3 pagesAssertion Reasonananya thakurNo ratings yet
- Review of Related Literature RRLDocument13 pagesReview of Related Literature RRLOtoke100% (2)
- Pentaksiran Tingkatan Satu: Terhad Peperiksaan Akhir TahunDocument6 pagesPentaksiran Tingkatan Satu: Terhad Peperiksaan Akhir Tahunfatihah0% (1)
- What Are The Different Types of Monitoring and Evaluation M&EDocument148 pagesWhat Are The Different Types of Monitoring and Evaluation M&ESayed Burhan SohailNo ratings yet
- Q1 Module 6 Employ Analytical Listening For Problem SolvingDocument34 pagesQ1 Module 6 Employ Analytical Listening For Problem SolvingKian CamaturaNo ratings yet