Download as docx, pdf, or txt
You might also like
- BMW M6 Torque SpecsDocument422 pagesBMW M6 Torque Specsstrobachyzoo100% (1)
- Process Dynamics and Control, Ch. 11 Solution ManualDocument29 pagesProcess Dynamics and Control, Ch. 11 Solution ManualBen Spearman100% (9)
- Performance Analysis of 33 11kv Substation and Its FeedersDocument6 pagesPerformance Analysis of 33 11kv Substation and Its FeedersShivang LowanshiNo ratings yet
- Slup083 PDFDocument7 pagesSlup083 PDFlu1agpNo ratings yet
- Permanent Magnet Motor: Instruction Manual and Experiment Guide For The PASCO Scientific Model SE-8658ADocument34 pagesPermanent Magnet Motor: Instruction Manual and Experiment Guide For The PASCO Scientific Model SE-8658AAbhijeet SinhaNo ratings yet
- Listening Task 1Document2 pagesListening Task 1Kaukab Mudassar0% (1)
- Electromechanical Energy Conversion: Kaunas University of TechnologyDocument10 pagesElectromechanical Energy Conversion: Kaunas University of TechnologyZeke Audijus AukštikalnisNo ratings yet
- A Sliding Mode Control For Robot ManipulatorDocument27 pagesA Sliding Mode Control For Robot ManipulatorauraliusNo ratings yet
- Ledesma Process Calculator - RevDocument3 pagesLedesma Process Calculator - RevAgustin UriaNo ratings yet
- Nur Fadillah (21613293) - Exercise 2 (Farmakokinetik Dasar)Document5 pagesNur Fadillah (21613293) - Exercise 2 (Farmakokinetik Dasar)NUR FADILLAH -No ratings yet
- Section 6 SSC 389Document16 pagesSection 6 SSC 389ibinmajedatyahooNo ratings yet
- CRE Assignment Problems 1 4Document4 pagesCRE Assignment Problems 1 4Sarah SanchezNo ratings yet
- Response SpectrumDocument4 pagesResponse SpectrumjetrogsarajemaNo ratings yet
- Queueing LectureDocument3 pagesQueueing LectureJhaister Ashley LayugNo ratings yet
- Experiment-5: Design SpecificationsDocument6 pagesExperiment-5: Design SpecificationsTimir PatelNo ratings yet
- Load AnalysisDocument1 pageLoad AnalysisShindiya LalNo ratings yet
- Corrida Ps1 (Mmhg) Pd1 (Kgf/Cm2) T1 (Seg) T2 (Seg) Tprom (Seg) Masa (Kg) 1 2 3 4 5 6 Calculos Corrida Gm (Kg/S) Q (L/S) Δp (Kgf/Cm2) H (Cm) P (Kgf*M/S) P (Hp) 1 2 3 4 5 6Document6 pagesCorrida Ps1 (Mmhg) Pd1 (Kgf/Cm2) T1 (Seg) T2 (Seg) Tprom (Seg) Masa (Kg) 1 2 3 4 5 6 Calculos Corrida Gm (Kg/S) Q (L/S) Δp (Kgf/Cm2) H (Cm) P (Kgf*M/S) P (Hp) 1 2 3 4 5 6Kurt Donald Cobain O'ConnorNo ratings yet
- M 470 FL 04 Ex 1 SolDocument9 pagesM 470 FL 04 Ex 1 SolEng Hussein ObeidatNo ratings yet
- Packed Column ExDocument2 pagesPacked Column ExDanielle BarkerNo ratings yet
- Volume CalcDocument6 pagesVolume CalcNikhil Ashok Badgu100% (1)
- Laboratorio Hidrã¡ulicaDocument2 pagesLaboratorio Hidrã¡ulicaJuan Diego Hoyos GiraldoNo ratings yet
- Lecture Title-10Document40 pagesLecture Title-10Adel AshrafNo ratings yet
- U18ec096 Vlsi Lab5Document8 pagesU18ec096 Vlsi Lab5bharath malothNo ratings yet
- CoduriDocument33 pagesCoduriEvelina DariaNo ratings yet
- Emergency Scrubber DesignDocument36 pagesEmergency Scrubber DesignSurajit das0% (1)
- Gas Natural1Document12 pagesGas Natural1ISRAEL RODRIGUEZNo ratings yet
- Fourier Series: Yi Cheng Cal Poly PomonaDocument46 pagesFourier Series: Yi Cheng Cal Poly PomonaJesusSQANo ratings yet
- 6.0 Result and Calculations Experiment Data Sheet: Experiment 1a G RDocument7 pages6.0 Result and Calculations Experiment Data Sheet: Experiment 1a G RcikaNo ratings yet
- 2020 07 02 00 00Document2 pages2020 07 02 00 00afsalmohmdNo ratings yet
- Ij Ij: TotalDocument14 pagesIj Ij: TotaltheotiskaNo ratings yet
- Parcial 3Document9 pagesParcial 3ソーダ エドゥアルドNo ratings yet
- Resp Beggs and BrillDocument6 pagesResp Beggs and BrillIreneo AguirreNo ratings yet
- Física para CMBDocument6 pagesFísica para CMBvaleosita2423No ratings yet
- RM 0,57Rm+0,57 0,43rm 0,57 RM 1.325581Document16 pagesRM 0,57Rm+0,57 0,43rm 0,57 RM 1.325581Yandra RizqhyNo ratings yet
- Acetic 2520acid 2520 - Design 2520of 2520equipments PDFDocument41 pagesAcetic 2520acid 2520 - Design 2520of 2520equipments PDFTanuj HandaNo ratings yet
- Exam MSSM 2009-07-07 SolutionDocument9 pagesExam MSSM 2009-07-07 SolutionBomber KillerNo ratings yet
- FizikaDocument1 pageFizikapoika00No ratings yet
- Vibration Assignment - 01F16MMD011 - Naik ParagpushpDocument4 pagesVibration Assignment - 01F16MMD011 - Naik ParagpushpParag NaikNo ratings yet
- 77 78 79Document3 pages77 78 79Ʃńg Mễdĥàť ẌƿNo ratings yet
- ET Penman CalculationDocument6 pagesET Penman CalculationAngelo Miguel Paz ArandaNo ratings yet
- Parcial 3Document9 pagesParcial 3ソーダ エドゥアルドNo ratings yet
- Function of Longitudinal AccelerationDocument9 pagesFunction of Longitudinal AccelerationSugiati WidodoNo ratings yet
- Calculadora MicrostripsDocument9 pagesCalculadora Microstripstomasr7No ratings yet
- Xylenes - Design 2520of 2520equipmentsDocument29 pagesXylenes - Design 2520of 2520equipmentsAditya KumarNo ratings yet
- APENDICE Absorcion GaseosaDocument25 pagesAPENDICE Absorcion GaseosaAstrid CastellanoNo ratings yet
- How To Use This Severity Chart: Example Fan 625 Um (25 Mils)Document2 pagesHow To Use This Severity Chart: Example Fan 625 Um (25 Mils)dk4monjureNo ratings yet
- Experiment (1) :performance of A Cintrifugal Pump at Constant SpeedDocument4 pagesExperiment (1) :performance of A Cintrifugal Pump at Constant SpeedghazalanowNo ratings yet
- Classical Control: Proportional, Integral, Derivative (PID) ControlDocument28 pagesClassical Control: Proportional, Integral, Derivative (PID) ControlAdil KhanNo ratings yet
- Total Lifeof Revolution Totalline of Minutes L10 × 10 L H 10 ×60Document3 pagesTotal Lifeof Revolution Totalline of Minutes L10 × 10 L H 10 ×60rip111176No ratings yet
- Example Swing EquationDocument5 pagesExample Swing EquationAmirul HafizNo ratings yet
- Well Discharge TestDocument8 pagesWell Discharge Testamy ackerNo ratings yet
- Digital Trip Relay: 2. Externals and ConfigurationDocument1 pageDigital Trip Relay: 2. Externals and ConfigurationSandhi YudiyantoNo ratings yet
- PCR CalculationsDocument7 pagesPCR Calculationsmarwatsum100% (2)
- Homework #1Document21 pagesHomework #1симона златковаNo ratings yet
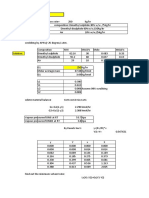
- KTP Untuk: 1. 2. - G .P 3. V : Praktikum Mekanika Fluida Koefisien LiftDocument6 pagesKTP Untuk: 1. 2. - G .P 3. V : Praktikum Mekanika Fluida Koefisien LiftDedy's StyaNo ratings yet
- Process ControlDocument55 pagesProcess ControlUmair IqbalNo ratings yet
- Design of Slab For FiveDocument9 pagesDesign of Slab For FiveMarvin Tan MaglinaoNo ratings yet
- Formula FracDocument15 pagesFormula FracEduardo AquinoNo ratings yet
- Signals and Systems Using Matlab Chapter 7 - Fourier Analysis in Communications and FilteringDocument21 pagesSignals and Systems Using Matlab Chapter 7 - Fourier Analysis in Communications and FilteringDiluNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- METR4200 - Advanced Control: Digital Control Design Chapter 13 Nise (Except 13.8, 13.9, 13.11)Document27 pagesMETR4200 - Advanced Control: Digital Control Design Chapter 13 Nise (Except 13.8, 13.9, 13.11)Michael PalmerNo ratings yet
- ME 534 - 03 Stability (Rev. 1.2)Document7 pagesME 534 - 03 Stability (Rev. 1.2)Michael PalmerNo ratings yet
- ME 534 - 02 Modeling I (Rev. 1.5)Document13 pagesME 534 - 02 Modeling I (Rev. 1.5)Michael PalmerNo ratings yet
- METR4200 - Advanced Control: Linear Quadratic Regulator Control (LQR)Document22 pagesMETR4200 - Advanced Control: Linear Quadratic Regulator Control (LQR)Michael PalmerNo ratings yet
- 10 LQ Optimal ControlDocument34 pages10 LQ Optimal ControlMichael PalmerNo ratings yet
- Centre of Mass and Mass Moment of Inertial of Homogeneous SolidsDocument1 pageCentre of Mass and Mass Moment of Inertial of Homogeneous SolidsMichael PalmerNo ratings yet
- A Brief Overview of Lyapunov Stability For Ordinary Differential EquationsDocument12 pagesA Brief Overview of Lyapunov Stability For Ordinary Differential EquationsMichael PalmerNo ratings yet
- Two Rotor Aero-Dynamical System: User's ManualDocument66 pagesTwo Rotor Aero-Dynamical System: User's ManualMichael PalmerNo ratings yet
- Sli Eeci13 CbiDocument44 pagesSli Eeci13 CbiMichael PalmerNo ratings yet
- ̅̅̅̅ ̅̅̅̅ Is The RTD's Nominal Resistance That Equals 300, and T Is The Temperature inDocument1 page̅̅̅̅ ̅̅̅̅ Is The RTD's Nominal Resistance That Equals 300, and T Is The Temperature inMichael PalmerNo ratings yet
- NonlinearSyst Ch1Document35 pagesNonlinearSyst Ch1Michael PalmerNo ratings yet
- Ram HBMDocument12 pagesRam HBMkkkoooNo ratings yet
- Fatigue Analysis Electric ActuatorDocument36 pagesFatigue Analysis Electric ActuatorAjimKe'en100% (1)
- Development of The TLM Method For EMC EMI AnalysisDocument4 pagesDevelopment of The TLM Method For EMC EMI AnalysisblindwidowNo ratings yet
- Electric Potential EnergyDocument7 pagesElectric Potential EnergyBilal JavedNo ratings yet
- No. Name Student ID Group: SFE1023 Electricity and MagnetismDocument7 pagesNo. Name Student ID Group: SFE1023 Electricity and Magnetismizz isalahNo ratings yet
- Android SOLAR GRASS CUTTER ReportDocument47 pagesAndroid SOLAR GRASS CUTTER ReportAnuj Tripathi80% (5)
- Hertiana Wunu (Bab 7, Bagian 6, Nomor 12)Document7 pagesHertiana Wunu (Bab 7, Bagian 6, Nomor 12)Pasaribu LisdiaNo ratings yet
- Fluid Mechanics - Unit 4 - Week 3 - FLUID DYNAMICS PDFDocument5 pagesFluid Mechanics - Unit 4 - Week 3 - FLUID DYNAMICS PDFAkhilesh KumarNo ratings yet
- All Experiments PDFDocument91 pagesAll Experiments PDFElias ChavezNo ratings yet
- Solution:: V 105m S S 62m T 0Document50 pagesSolution:: V 105m S S 62m T 0Yousif AL Ayoubi100% (1)
- Object CounterDocument39 pagesObject CounterNARESH WALIA100% (1)
- Electrical Parameter Measuring Unit Symbol DescriptionDocument3 pagesElectrical Parameter Measuring Unit Symbol Descriptionbee loggerNo ratings yet
- Forces and InclinesDocument16 pagesForces and InclinesCarlo Gimarino SalazarNo ratings yet
- Rheology and Soil Mechanics RH Ologie Et M Canique Des Sols Symposium Grenoble April 1-8-1964 Symposium Grenoble 1er 8 Avril 1964 2Document519 pagesRheology and Soil Mechanics RH Ologie Et M Canique Des Sols Symposium Grenoble April 1-8-1964 Symposium Grenoble 1er 8 Avril 1964 2Jasmin AgriNo ratings yet
- Kurt Lewin ModelDocument18 pagesKurt Lewin ModelNaman MaheshwariNo ratings yet
- 5 Chapter 5 Forces, Acceleration and EnergyDocument36 pages5 Chapter 5 Forces, Acceleration and EnergyTutor EdNo ratings yet
- Mc-Eee313 L3Document17 pagesMc-Eee313 L3NASIM eeeNo ratings yet
- Physics Form Ii 2023Document8 pagesPhysics Form Ii 2023alafaabdallah118No ratings yet
- Three Phase Induction RegulatorDocument5 pagesThree Phase Induction RegulatormohamedmohebNo ratings yet
- Simple DIY Induction Heater - RMCyberneticsDocument47 pagesSimple DIY Induction Heater - RMCyberneticsIndra LevyprawiraNo ratings yet
- 15XW 1c, 25kV, 260mil XLP (100%), WS, PVC6871 PDFDocument2 pages15XW 1c, 25kV, 260mil XLP (100%), WS, PVC6871 PDFLuis MartinezNo ratings yet
- M SC (Physics) W e F 2019-20 Admitted Batch PDFDocument59 pagesM SC (Physics) W e F 2019-20 Admitted Batch PDFJagan EashwarNo ratings yet
- EE482 Tutorial 7 Stability PDFDocument9 pagesEE482 Tutorial 7 Stability PDFgerrzen64No ratings yet
- Chapter 2. Kinematics in One DimensionDocument74 pagesChapter 2. Kinematics in One DimensionMaggie WestbrookNo ratings yet
- KT62 ManualDocument30 pagesKT62 ManualandyjwatsonNo ratings yet
- One-Dimensional Kinematics: Physics 1401 Formula Sheet - Exam 3Document7 pagesOne-Dimensional Kinematics: Physics 1401 Formula Sheet - Exam 3Mia RismaliaNo ratings yet