Download as docx, pdf, or txt
You might also like
- 2656.08ae72c00ic34 01 01Document5 pages2656.08ae72c00ic34 01 01Bui Huu BinhNo ratings yet
- Log2 AnsiDocument17 pagesLog2 AnsizkovaNo ratings yet
- 74HC107 PDFDocument12 pages74HC107 PDFVictor CabosNo ratings yet
- Synchronous Presettable 4-Bit Counter: M B Order CodesDocument12 pagesSynchronous Presettable 4-Bit Counter: M B Order CodesMarimuthu RajNo ratings yet
- M74HC595B1Document13 pagesM74HC595B1GeorgeNo ratings yet
- 74HC4024Document11 pages74HC4024jnax101No ratings yet
- 24AA512/24LC512/24FC512: 512K I C Cmos Serial EepromDocument28 pages24AA512/24LC512/24FC512: 512K I C Cmos Serial EepromAitor DuoNo ratings yet
- Ut62256cpc 70LLDocument12 pagesUt62256cpc 70LLElida Sari LubisNo ratings yet
- M54HCT244: Rad Hard Octal Bus Buffer With 3 State Outputs (Non Inverted)Document10 pagesM54HCT244: Rad Hard Octal Bus Buffer With 3 State Outputs (Non Inverted)Deepa DevarajNo ratings yet
- EVA4400 Backend TroubleshootingDocument47 pagesEVA4400 Backend TroubleshootingMilton Raimundo100% (1)
- 74HC27Document9 pages74HC27jnax101No ratings yet
- 2G Parameter Template RG10 v1 20 ISHODocument105 pages2G Parameter Template RG10 v1 20 ISHORockyNo ratings yet
- MCB Specification Bsen60898Document6 pagesMCB Specification Bsen60898jayswamiiNo ratings yet
- EEPROM 24LC256 DatasheetDocument26 pagesEEPROM 24LC256 DatasheetJustice BaloyiNo ratings yet
- 0km XCOM SCR1 IDDCFFs SPD3-DELLDocument3 pages0km XCOM SCR1 IDDCFFs SPD3-DELLClaudio DinizNo ratings yet
- NE556 SA556 - SE556: General Purpose Dual Bipolar TimersDocument10 pagesNE556 SA556 - SE556: General Purpose Dual Bipolar TimersUlises AlejandreNo ratings yet
- hw2 SolutionDocument5 pageshw2 SolutionkalyanakumarkgNo ratings yet
- 74HC00Document9 pages74HC00jnax101No ratings yet
- Datasheet 7400Document9 pagesDatasheet 7400gab50No ratings yet
- Quad Exclusive or Gate: PD CC oDocument7 pagesQuad Exclusive or Gate: PD CC oHungChiHoNo ratings yet
- Chapter 7 CircuitDocument89 pagesChapter 7 Circuitsiran3025No ratings yet
- Protocol FailureDocument5 pagesProtocol Failurenithish.singh8946No ratings yet
- I C Serial EEPROM Family Data Sheet: Features: DescriptionDocument42 pagesI C Serial EEPROM Family Data Sheet: Features: DescriptionCarlos GonzalezNo ratings yet
- 74HC4075Document9 pages74HC4075jnax101No ratings yet
- 8 Bit Shift Register With Output Latches (3 State) : Order CodesDocument16 pages8 Bit Shift Register With Output Latches (3 State) : Order CodesQuyet Pham DangNo ratings yet
- Quad 2-Input and Gate: Order CodesDocument8 pagesQuad 2-Input and Gate: Order CodesMaizatul Hanisah RoziNo ratings yet
- ¡ Semiconductor: MSM80C88A-10RS/GS/JSDocument37 pages¡ Semiconductor: MSM80C88A-10RS/GS/JSZarate BismkNo ratings yet
- Turbofan To TurbojetDocument6 pagesTurbofan To Turbojetamit_ansal222301No ratings yet
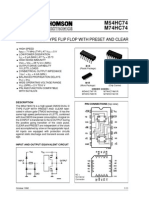
- 74HC74Document11 pages74HC74jnax101No ratings yet
- 74HC08Document9 pages74HC08jnax101No ratings yet
- Lab Title: Objectives: Material Required:: Sinusoidal Steady StateDocument11 pagesLab Title: Objectives: Material Required:: Sinusoidal Steady Stateahmed shahNo ratings yet
- Semiconductor Technical Data: L SuffixDocument7 pagesSemiconductor Technical Data: L SuffixMerényi OszkárNo ratings yet
- Optoacoplador Integrado 4N25Document7 pagesOptoacoplador Integrado 4N25aureliocsNo ratings yet
- 74HC04Document9 pages74HC04jnax101No ratings yet
- I2c Eeprom'sDocument44 pagesI2c Eeprom'sRamon GutierrezNo ratings yet
- Octal Bus Buffer With 3 State Outputs (Non Inverted) : M B Order CodesDocument8 pagesOctal Bus Buffer With 3 State Outputs (Non Inverted) : M B Order CodesStevenNo ratings yet
- M54HC164 M74HC164: 8 Bit Sipo Shift RegisterDocument12 pagesM54HC164 M74HC164: 8 Bit Sipo Shift RegisterCANTHO91No ratings yet
- hc273 PDFDocument11 pageshc273 PDFGustavo NavaNo ratings yet
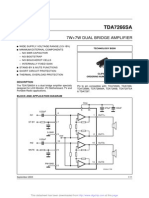
- Tda7266sa PDFDocument11 pagesTda7266sa PDFerju10No ratings yet
- 74HC393Document12 pages74HC393jnax101No ratings yet
- 通信测试桢Document7 pages通信测试桢rockNo ratings yet
- Hex Buffer/Converter: Order CodesDocument8 pagesHex Buffer/Converter: Order CodespopovjimNo ratings yet
- mc14518bcp en PDFDocument8 pagesmc14518bcp en PDFdellcoNo ratings yet
- Exp 2 InstroDocument16 pagesExp 2 InstroAbed Alrahman QaddourNo ratings yet
- New PSSL LabDocument17 pagesNew PSSL LabNewton RaiNo ratings yet
- Teldat 3GDocument6 pagesTeldat 3Gyhubal surco A.No ratings yet
- General Purpose Transistors PNP Silicon: Absolute Maximum Ratings (Ta 25 C)Document7 pagesGeneral Purpose Transistors PNP Silicon: Absolute Maximum Ratings (Ta 25 C)Costel CojocaruNo ratings yet
- 74HC241Document12 pages74HC241jnax101No ratings yet
- Preliminary: Features Pin ConnectionsDocument6 pagesPreliminary: Features Pin ConnectionsMaxguttyNo ratings yet
- 74HC273Document11 pages74HC273jnax101No ratings yet
- 93C66 Microwire EepromDocument13 pages93C66 Microwire EepromadrianramonNo ratings yet
- Infineon - Selection Guide - General Purpose DiodesDocument84 pagesInfineon - Selection Guide - General Purpose DiodestarpinoNo ratings yet
- MPS A14Document6 pagesMPS A14Petr KoutnýNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet