Download as pdf or txt
You might also like
- Subsea Rigid Pipelines – Methods of InstallationFrom EverandSubsea Rigid Pipelines – Methods of InstallationRating: 5 out of 5 stars5/5 (1)
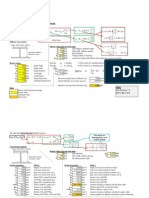
- Mooring Pontoon calculation sheet: Input Meteo Data: Value: Angle (α) RAD: UnitDocument1 pageMooring Pontoon calculation sheet: Input Meteo Data: Value: Angle (α) RAD: UnitLazaros Ntoanidis100% (2)
- Mooring Forces Port or STBD On Quay WWW - Thenavalarch.com Rev 1Document10 pagesMooring Forces Port or STBD On Quay WWW - Thenavalarch.com Rev 1Mohamed Elfawal100% (2)
- System Post-Implementation Review Audit Work ProgramDocument4 pagesSystem Post-Implementation Review Audit Work ProgramRechelle ValerioNo ratings yet
- Mooring Design (Bollard or QRH)Document12 pagesMooring Design (Bollard or QRH)Anonymous ZMLlQvBop75% (4)
- Bollard Pull Analysis - 21!10!15Document39 pagesBollard Pull Analysis - 21!10!15Siva Pasagadugula100% (3)
- B. Equivalent Axial (N) and Lateral (Q) Loads: SD SDDocument2 pagesB. Equivalent Axial (N) and Lateral (Q) Loads: SD SDRahul Malani100% (1)
- Coastal Engineering Manual: Overview And Coastal HydrodynamicsFrom EverandCoastal Engineering Manual: Overview And Coastal HydrodynamicsNo ratings yet
- Comandos Navigator HuaweiDocument49 pagesComandos Navigator HuaweiClaudio Saez50% (4)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- OPTIMOOR - Mooring Analysis Program TourDocument8 pagesOPTIMOOR - Mooring Analysis Program TourPhuluang Ninrut Na AyuttayaNo ratings yet
- Mooring Hands CalcsDocument8 pagesMooring Hands CalcsLyudmyla Bobina100% (1)
- T Barge AnalysisDocument27 pagesT Barge AnalysisBooraj Duraisamy90% (10)
- Bollard Pull Calculations - An Introduction (Part I)Document15 pagesBollard Pull Calculations - An Introduction (Part I)Asela BandaraNo ratings yet
- Seafastening Holding Down BracketDocument1 pageSeafastening Holding Down BracketRohan Karande50% (2)
- Load OutDocument239 pagesLoad OutDeepak Kumar100% (2)
- Analysis & Design of Dolphin PilesDocument376 pagesAnalysis & Design of Dolphin PilesMotasem Matarneh100% (2)
- Azure Cloud Design PatternsDocument8 pagesAzure Cloud Design PatternsAdepu RamMohan0% (1)
- 23 Mooring Analysis During ShorepullDocument53 pages23 Mooring Analysis During ShorepullNoverdo Saputra100% (1)
- Mooring StudyDocument206 pagesMooring Studysungkang100% (6)
- Mooring Design AnalysisDocument41 pagesMooring Design AnalysisRaghu Nath100% (1)
- V1 0 PDFDocument8 pagesV1 0 PDFnap_carino100% (1)
- Guidelines For MooringsDocument37 pagesGuidelines For MooringsKin Lai Kong100% (6)
- Mooring Force Analysis Methods Pianc - 2003 - Mooring - WatersDocument40 pagesMooring Force Analysis Methods Pianc - 2003 - Mooring - WatersDave Dumont100% (7)
- Barge Stability GuidelinesDocument10 pagesBarge Stability Guidelinesnautilus73100% (2)
- Mooring and Berthing Analysis and DesignDocument6 pagesMooring and Berthing Analysis and DesignIgnatius Samraj67% (3)
- Wind Area and Forces For Beam Wind: Item Description CH Cs Projected Area (SQ.M) Pressure (N/SQ.M)Document10 pagesWind Area and Forces For Beam Wind: Item Description CH Cs Projected Area (SQ.M) Pressure (N/SQ.M)Amit KumarNo ratings yet
- Mooring Design & Mooring Analysis IndiaDocument17 pagesMooring Design & Mooring Analysis IndiaMermaid coNo ratings yet
- Miscellaneous Calculations: 1 Sea Transport Forces On CargoDocument4 pagesMiscellaneous Calculations: 1 Sea Transport Forces On CargoAgarry EmmanuelNo ratings yet
- Barge 180Ft Deck Load Capacity & Strength-Rev1Document52 pagesBarge 180Ft Deck Load Capacity & Strength-Rev1Wahyu Codyr86% (7)
- Quayside Mooring Analysis - Floatel Triumph at Kemaman (P30049-MA-REV 0) (2095)Document35 pagesQuayside Mooring Analysis - Floatel Triumph at Kemaman (P30049-MA-REV 0) (2095)cliff1234No ratings yet
- Using MS Excel To Evaluate The Stability of Existing BargesDocument13 pagesUsing MS Excel To Evaluate The Stability of Existing BargesGiorgi KandelakiNo ratings yet
- Berthing Energy 12000 TEU (Emma Maersk E-Class)Document26 pagesBerthing Energy 12000 TEU (Emma Maersk E-Class)Rohit Rumade100% (1)
- Bollard Pull Calculations For Towing OperationsDocument12 pagesBollard Pull Calculations For Towing OperationsIgnacio SantanaNo ratings yet
- OrcaFlex TutorialDocument491 pagesOrcaFlex Tutorialaipk11100% (1)
- Mooring Strength AnalysisDocument44 pagesMooring Strength AnalysisNurul Nabila Mas SudinNo ratings yet
- Wave Loading On Offshore StructuresDocument309 pagesWave Loading On Offshore StructuresJorge Cipriano100% (1)
- Orcaflex Training ScopeDocument3 pagesOrcaflex Training ScopeGodwinNo ratings yet
- MOORING CALCULATIONS (S)Document6 pagesMOORING CALCULATIONS (S)halimNo ratings yet
- Wharf Design Criteria V1.0 2007Document96 pagesWharf Design Criteria V1.0 2007Mahmut Karataş100% (2)
- Mooring Load Analysis ASCE 1998Document10 pagesMooring Load Analysis ASCE 1998Peyman MznNo ratings yet
- Analysis of Jackup Rig in Wet Tow TransitDocument95 pagesAnalysis of Jackup Rig in Wet Tow Transitlalithkumar145No ratings yet
- 7.1 Suction Foundations in GeneralDocument14 pages7.1 Suction Foundations in GeneralbreeeeezzzzzeNo ratings yet
- Orca FlexDocument9 pagesOrca FlexThis ManNo ratings yet
- Mooring Chain Fatigue (FLS) ConditionDocument12 pagesMooring Chain Fatigue (FLS) ConditionDefi Rizki MaulianiNo ratings yet
- Mooring DesignDocument264 pagesMooring DesignRafael CampderáNo ratings yet
- Dynamic Mooring AnalysisDocument2 pagesDynamic Mooring AnalysishossamNo ratings yet
- Moses WorkbookDocument108 pagesMoses Workbookvivekt510100% (1)
- 1 - Side by Side Mooring AnalysisDocument11 pages1 - Side by Side Mooring AnalysisYong KimNo ratings yet
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityFrom EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNo ratings yet
- Dynamic positioning The Ultimate Step-By-Step GuideFrom EverandDynamic positioning The Ultimate Step-By-Step GuideRating: 5 out of 5 stars5/5 (1)
- Deep Water Mooring Dynamics: ElsevierDocument29 pagesDeep Water Mooring Dynamics: ElsevierFernandoMartínIranzoNo ratings yet
- Omae 2001/OFT-1020Document9 pagesOmae 2001/OFT-1020FernandoMartínIranzoNo ratings yet
- Anchor ForceDocument14 pagesAnchor ForceAdi Mulyadi100% (1)
- 1 s2.0 S0029801800000585 MainDocument16 pages1 s2.0 S0029801800000585 MainRoberto BezerraNo ratings yet
- Calculation of PCB Track ImpedanceDocument6 pagesCalculation of PCB Track ImpedanceDurbha RaviNo ratings yet
- Sag and Tension Calculations MountainsDocument8 pagesSag and Tension Calculations MountainsAhsan MahmoodNo ratings yet
- ZZ Req 2Document32 pagesZZ Req 2theodorebayuNo ratings yet
- Mathematics in The Wind: D. Detomi, N. Parolini and A. QuarteroniDocument22 pagesMathematics in The Wind: D. Detomi, N. Parolini and A. QuarteroniecasayangNo ratings yet
- Dynamic Analysis of Railway Bridges by Means of The Spectral MethodDocument10 pagesDynamic Analysis of Railway Bridges by Means of The Spectral Methodewa1988No ratings yet
- And TM-Waves in Waveguides General Cross Section": NovemberDocument9 pagesAnd TM-Waves in Waveguides General Cross Section": Novemberవేలుసామి లింగాసామిNo ratings yet
- 2011 The Interactive Vibration Behavior I PDFDocument14 pages2011 The Interactive Vibration Behavior I PDFCaroline Cole100% (1)
- Stress-Strain Creep and Temperature Dependency of ADSS Sag AnDocument9 pagesStress-Strain Creep and Temperature Dependency of ADSS Sag Anденис логиновNo ratings yet
- Analog Parts Kit - DigilentDocument6 pagesAnalog Parts Kit - DigilentMario AcostaNo ratings yet
- Apache CXF vs. Apache AXIS Vs Spring WSDocument4 pagesApache CXF vs. Apache AXIS Vs Spring WShi_nabanNo ratings yet
- Cisco Router Security Configuration CommandsDocument3 pagesCisco Router Security Configuration CommandsSteve HyznyNo ratings yet
- Test Bank For Network Guide To Networks 8th Edition by WestDocument21 pagesTest Bank For Network Guide To Networks 8th Edition by Westshellyjohnsonrgsmbtfnjc100% (30)
- A Plan For No SpamDocument29 pagesA Plan For No SpamBibinMathewNo ratings yet
- CBSE Class 7 Mathematics MCQs Algebraic ExpressionDocument3 pagesCBSE Class 7 Mathematics MCQs Algebraic Expressionsiba padhyNo ratings yet
- Data Analytics Boot Camp: Curriculum OverviewDocument12 pagesData Analytics Boot Camp: Curriculum OverviewAbuelo Escobar100% (1)
- IAU290 - Dealer Business Management - SAP TrainingDocument3 pagesIAU290 - Dealer Business Management - SAP Trainingfiestamix100% (1)
- Az PDFDocument132 pagesAz PDFAlan Barreras GastelumNo ratings yet
- Houdini Foundations 19-5-01Document226 pagesHoudini Foundations 19-5-01jose luis bernardaNo ratings yet
- Landownership in The Philippines Under SpainDocument27 pagesLandownership in The Philippines Under SpainSheena De La CruzNo ratings yet
- Forensics FJDocument28 pagesForensics FJFaizan Javed (Faizi)No ratings yet
- Samsung TFT-LCD Monitors: Product GuideDocument8 pagesSamsung TFT-LCD Monitors: Product GuideHorváth KárolyNo ratings yet
- E200PS Operation Manual (V1.00)Document23 pagesE200PS Operation Manual (V1.00)norinni abu bakarNo ratings yet
- CVS-128 128B OME Rev06Document84 pagesCVS-128 128B OME Rev06Ahamed Shiraz ARNo ratings yet
- String HDocument3 pagesString HRamarolahy Dadan'i EliaNo ratings yet
- Dell Server Price List - September 2017Document1 pageDell Server Price List - September 2017Ajith SudirukkuNo ratings yet
- Project Inititation Document Template PDFDocument8 pagesProject Inititation Document Template PDFZYSHANNo ratings yet
- BrochureRelesConfigurables PNOZMulti-Minimulti 020313Document104 pagesBrochureRelesConfigurables PNOZMulti-Minimulti 020313Jose Luis AguilarNo ratings yet
- GDPR Privacy Policy Template - Free Privacy PolicyDocument23 pagesGDPR Privacy Policy Template - Free Privacy PolicyChristos FloridisNo ratings yet
- Chapter 6 - PertDocument3 pagesChapter 6 - PertWong Pei YinNo ratings yet
- Uv Winlab Software Manual EspañolDocument2 pagesUv Winlab Software Manual EspañolRoberto BonillaNo ratings yet
- Call 800-DIESELS (343-7357) : Cummins Inc. - Box 3005 - Columbus, Indiana 47202-3005 USADocument2 pagesCall 800-DIESELS (343-7357) : Cummins Inc. - Box 3005 - Columbus, Indiana 47202-3005 USAreycoeleNo ratings yet
- Essay Contest Rules On West Philippine Sea: 115 East 57th Street, Suite 1430 New York, NY 10022Document5 pagesEssay Contest Rules On West Philippine Sea: 115 East 57th Street, Suite 1430 New York, NY 10022ramszlaiNo ratings yet
- CV Placements (1) FinalDocument3 pagesCV Placements (1) FinalMahesh MauryaNo ratings yet
- GG C InstallationDocument18 pagesGG C InstallationMd. Ahsanul MoyeenNo ratings yet
- Johnathan Moulton: EducationDocument1 pageJohnathan Moulton: EducationAnonymous lvtScAO7No ratings yet