Download as pdf or txt
You might also like
- 30day Dumbell v3Document21 pages30day Dumbell v3Dung Nhat100% (1)
- Customizing Reference - POS Client - 7.4 (5.19.0) - enDocument200 pagesCustomizing Reference - POS Client - 7.4 (5.19.0) - enZeyad HossamNo ratings yet
- JFEDocument22 pagesJFErahul srivastavaNo ratings yet
- Glass Reinforced PlasticsFrom EverandGlass Reinforced PlasticsBrian ParkynRating: 5 out of 5 stars5/5 (1)
- Indian Songs Music Notes - Kanmani Anbodu Guitar TabsDocument4 pagesIndian Songs Music Notes - Kanmani Anbodu Guitar TabsAthishNo ratings yet
- Tools and Equipment in Baking 2.-0Document38 pagesTools and Equipment in Baking 2.-0Marian Joey Gorgonio100% (1)
- Topic1-Introduction To Gears PDFDocument55 pagesTopic1-Introduction To Gears PDFimranNo ratings yet
- Gears: by Aknath MishraDocument20 pagesGears: by Aknath Mishrasamurai7_77No ratings yet
- Gear CatalogDocument50 pagesGear CatalogRakesh KumarNo ratings yet
- Turning and Drilling PPT MFG Chapter23 FinalDocument78 pagesTurning and Drilling PPT MFG Chapter23 FinalRavichandran GNo ratings yet
- GM868 Gas Ultrasonic FlowmeterDocument4 pagesGM868 Gas Ultrasonic FlowmeterDikranNo ratings yet
- 3D Printer : A Report OnDocument51 pages3D Printer : A Report Ongoutham k.sNo ratings yet
- Design and Construction of A Biogas BurnerDocument8 pagesDesign and Construction of A Biogas BurnerJuan Diego ValenciaNo ratings yet
- Gear Cutting OperationsDocument23 pagesGear Cutting OperationsHossam Ali0% (1)
- G2 DiscBrakeDocument33 pagesG2 DiscBrakesiddout2006No ratings yet
- 45 Manufacturing ProcessDocument45 pages45 Manufacturing ProcessOtunba Olakunle Sunday AjayiNo ratings yet
- Industrial Report On Production Process of Steel Mills LTD: A Study On Ratanpur Steel Re-Rolling MillsDocument21 pagesIndustrial Report On Production Process of Steel Mills LTD: A Study On Ratanpur Steel Re-Rolling MillsAbid HasanNo ratings yet
- Wear On HOT RoLLING Mill RollsDocument15 pagesWear On HOT RoLLING Mill RollssourajpatelNo ratings yet
- Con CastDocument5 pagesCon CastZubair AhmadNo ratings yet
- ME 114 - Engineering Drawing II: Fits, Tolerances and Surface Quality MarksDocument19 pagesME 114 - Engineering Drawing II: Fits, Tolerances and Surface Quality MarksMuhamad Richard MenarizkiNo ratings yet
- Design and Fabrication of GearBoxDocument21 pagesDesign and Fabrication of GearBoxSanjeev SinghNo ratings yet
- Chip Recycling Brochure-NewDocument2 pagesChip Recycling Brochure-NewVijaykumar SharmaNo ratings yet
- A PPT On NBC TrainingDocument17 pagesA PPT On NBC Traininggourav_nama_2150% (2)
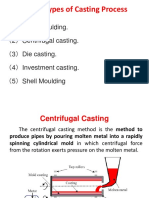
- Types of CastingDocument14 pagesTypes of CastingRamoji Aditya Chary100% (1)
- Roller Conveyor Chain AttachmentsDocument19 pagesRoller Conveyor Chain AttachmentsRichard VachonNo ratings yet
- Mechanical Design Project Cost EstimationDocument9 pagesMechanical Design Project Cost EstimationEinotes TeamNo ratings yet
- Mild SteelDocument1 pageMild SteelSapari Vel100% (1)
- TaegoTech - PG BroshureDocument11 pagesTaegoTech - PG Broshurealexl5892No ratings yet
- Everything You Need To Know About Flatteners and Levelers For Coil ProcessingDocument6 pagesEverything You Need To Know About Flatteners and Levelers For Coil ProcessingPraful PatilNo ratings yet
- Complete CatalogDocument651 pagesComplete CatalogFernando EscriváNo ratings yet
- Solar Wood CutterDocument13 pagesSolar Wood Cuttern_amarsinh9938No ratings yet
- Full Text 01Document33 pagesFull Text 01Zoric Bobby100% (1)
- Metallurgy, Properties, and Uses of FerrousDocument37 pagesMetallurgy, Properties, and Uses of FerrousAl DrinNo ratings yet
- Mitsu 14 Technical DataDocument52 pagesMitsu 14 Technical DataRajesh Mishra100% (1)
- 11Document6 pages11sleshiNo ratings yet
- Cleaning of Steel and Removal of Rust PDFDocument10 pagesCleaning of Steel and Removal of Rust PDFDawooz SaDam OnexoxNo ratings yet
- (NIIR) The Complete Technology Book On Hot Rolling of SteelDocument13 pages(NIIR) The Complete Technology Book On Hot Rolling of SteelAndréNo ratings yet
- Production Engineering Lab VIII SemDocument24 pagesProduction Engineering Lab VIII Semsunil kumawatNo ratings yet
- Mechanism of RollingDocument4 pagesMechanism of RollingGanesh Kotipalli100% (1)
- 1 s2.0 S0143974X21002212 MainDocument14 pages1 s2.0 S0143974X21002212 MainRavi PadmanabhanNo ratings yet
- A Review of High Speed Machining of Titanium AlloysDocument0 pagesA Review of High Speed Machining of Titanium AlloysGeoffrey ArmstrongNo ratings yet
- Auto CadDocument21 pagesAuto CadMohammed AminNo ratings yet
- Anvita SharmaDocument45 pagesAnvita SharmaJay MehtaNo ratings yet
- Introduction To Non Conventional OperationsDocument13 pagesIntroduction To Non Conventional Operationssham javed100% (1)
- Pneumatic Auto Feed Sheet Cutting MachineDocument5 pagesPneumatic Auto Feed Sheet Cutting MachineVigneshwaran Srinivasan100% (1)
- A-313 - 98Document7 pagesA-313 - 98José Ramón GutierrezNo ratings yet
- Hot Dip Galvanizing of Sheet Metal-SpangleDocument6 pagesHot Dip Galvanizing of Sheet Metal-SpangleAgustine SetiawanNo ratings yet
- Single Point Cutting ToolDocument16 pagesSingle Point Cutting ToolSoumik DasNo ratings yet
- Rack and Pinion Gear DesignDocument32 pagesRack and Pinion Gear DesignSrini KumarNo ratings yet
- Cutting Tool MaterialsDocument5 pagesCutting Tool MaterialsMichael MeltzNo ratings yet
- For Wood Cutter MachineDocument19 pagesFor Wood Cutter MachineRahul Rajput100% (1)
- Cutting Tool MaterialsDocument44 pagesCutting Tool MaterialsProframanujamNo ratings yet
- Unit-5 Unconventional Manufacturing ProcessesDocument12 pagesUnit-5 Unconventional Manufacturing Processesbrijkishor201783% (6)
- Information Symposium Measurement and Control Techniques in Rolling: Luxembourg, 2 and 3 September 1981From EverandInformation Symposium Measurement and Control Techniques in Rolling: Luxembourg, 2 and 3 September 1981No ratings yet
- GEARSDocument23 pagesGEARSranjith747483No ratings yet
- Chapter 1-Gear SystemDocument28 pagesChapter 1-Gear Systemazim100% (1)
- GearsDocument21 pagesGearsabduallah rabahNo ratings yet
- Types of GearsDocument5 pagesTypes of GearsKarthikNo ratings yet
- Chapter 1-Gear SystemDocument27 pagesChapter 1-Gear SystemDanielRao100% (2)
- CH 08Document77 pagesCH 08abdallah ghannamNo ratings yet
- Chalk and Talk Presentation On Gear'Document26 pagesChalk and Talk Presentation On Gear'Darshan HarsoraNo ratings yet
- Thesis ReportDocument72 pagesThesis ReportMayur ShetNo ratings yet
- Type of GearsDocument6 pagesType of Gearskamalezwan100% (1)
- Fausta1 981Document6 pagesFausta1 981LiChAID Life Changing AidNo ratings yet
- PNP GameDocument2 pagesPNP GameRadu StratilaNo ratings yet
- The Importance of Being EarnestDocument3 pagesThe Importance of Being EarnestmusashisdNo ratings yet
- Under Test Cert 12017Document2 pagesUnder Test Cert 12017aamedNo ratings yet
- Great Camera Canon 80DDocument5 pagesGreat Camera Canon 80DSree MNo ratings yet
- Detailed Lesson Plan in MAPEH 7Document11 pagesDetailed Lesson Plan in MAPEH 7Mhar Carpio SilvosaNo ratings yet
- Motherboard GA B75M D2VDocument44 pagesMotherboard GA B75M D2VDragutinADNo ratings yet
- Q3 Music 9 Module 2Document14 pagesQ3 Music 9 Module 2Ricky Lauron0% (1)
- Cumulus DesignDocument12 pagesCumulus Designlacic48500No ratings yet
- Licensed To Luis Miguel Leon. ANSI Order X - 488959. Downloaded 10/3/2017 10:05 AM. Single User License Only. Copying and Networking ProhibitedDocument50 pagesLicensed To Luis Miguel Leon. ANSI Order X - 488959. Downloaded 10/3/2017 10:05 AM. Single User License Only. Copying and Networking ProhibitedLaukuervogiraldogmail.com CuervoNo ratings yet
- 10 Auditory Performing Arts PDFDocument15 pages10 Auditory Performing Arts PDFAdrian RoxasNo ratings yet
- Apparel Merchandising Assingnment 1Document21 pagesApparel Merchandising Assingnment 1Neha Shrivastava100% (1)
- Analysis of StoryboardsDocument26 pagesAnalysis of Storyboardsapi-477227067No ratings yet
- Project Proposal Presentation PDFDocument21 pagesProject Proposal Presentation PDFHesham TaherNo ratings yet
- ZS3-2 Hardware OverviewDocument17 pagesZS3-2 Hardware OverviewAldrey Luciano RibeiroNo ratings yet
- Desu Arimasu ImasuDocument2 pagesDesu Arimasu Imasuapi-244108308No ratings yet
- ECE EEE F418 Term Project Presentation ScheduleDocument7 pagesECE EEE F418 Term Project Presentation SchedulesaimanobhiramNo ratings yet
- Camera Angles Movement Positions WorksheetDocument2 pagesCamera Angles Movement Positions Worksheetgrace100% (1)
- Modal Verbs FuegoDocument3 pagesModal Verbs FuegoLuis HernandezNo ratings yet
- A1 RikaiDocument2 pagesA1 RikaiChaitra Patil100% (1)
- Fiora Ravenheart: Human Neutral GoodDocument3 pagesFiora Ravenheart: Human Neutral GoodNagadowNo ratings yet
- Exercise On Reported SpeechDocument4 pagesExercise On Reported SpeechsweetzazaNo ratings yet
- GET RIPPED Workout Plan by Guru Mann PDFDocument2 pagesGET RIPPED Workout Plan by Guru Mann PDFmayank100% (1)
- 2 Flat PulleyDocument11 pages2 Flat PulleyHasan AshariNo ratings yet
- A News Reading Script Group Seyla, Arga, Sandra, Hidayah, HafidDocument3 pagesA News Reading Script Group Seyla, Arga, Sandra, Hidayah, HafidHafid Abdulloh WahyudiNo ratings yet
- Cae Vocabulary Hobbies and ActivitiesDocument8 pagesCae Vocabulary Hobbies and ActivitiesAnonymous YFs9QtNo ratings yet