Download as pdf or txt
You might also like
- Circuit Analysis: A Systems ApproachDocument9 pagesCircuit Analysis: A Systems ApproachEmadElDinEzzat0% (1)
- System Dynamics and Control Itü ProgramDocument3 pagesSystem Dynamics and Control Itü ProgramCeren ArpakNo ratings yet
- Topic Material: MAAE4500, Fall 2009Document1 pageTopic Material: MAAE4500, Fall 2009jonthemesNo ratings yet
- 7 Matlab For Proses ControlDocument15 pages7 Matlab For Proses ControlHari RionaldoNo ratings yet
- Automatic Control System IndexDocument9 pagesAutomatic Control System IndexDeeksha SaxenaNo ratings yet
- Lab4_characteristic of First Order SystemDocument3 pagesLab4_characteristic of First Order SystemFaris IzzatNo ratings yet
- Modem Control Systema Analysis and Design in MATLABDocument84 pagesModem Control Systema Analysis and Design in MATLABArmando CajahuaringaNo ratings yet
- CIS Control Technology-Theory-Spring-2021Document6 pagesCIS Control Technology-Theory-Spring-2021mishal shakeelNo ratings yet
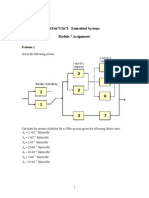
- Module 7 AssignmentDocument4 pagesModule 7 AssignmentSeth Waddingham0% (1)
- LCS Important TopicsDocument1 pageLCS Important TopicsUnmesh PeriNo ratings yet
- Control SystemDocument215 pagesControl SystemRyan Tuyan100% (1)
- LabInstr EE370L Lab2Document6 pagesLabInstr EE370L Lab2tabassNo ratings yet
- Control System - I: Weekly Lesson PlanDocument5 pagesControl System - I: Weekly Lesson Plandebasishmee5808No ratings yet
- Meen19111103 Lab 04Document9 pagesMeen19111103 Lab 04Engr. Usman WaheedNo ratings yet
- LabInstr EE370L Lab2Document6 pagesLabInstr EE370L Lab2Engr Haseena JabbarNo ratings yet
- ME 474 Syllabus 20211Document6 pagesME 474 Syllabus 20211aziz DeganiNo ratings yet
- Bequette - Control de ProcesosDocument94 pagesBequette - Control de ProcesosKevin Torres ValenciaNo ratings yet
- FBCS Lab Manual Fall 2019-1 PDFDocument71 pagesFBCS Lab Manual Fall 2019-1 PDFOsama MallickNo ratings yet
- Small Deeds Big RewardsDocument2 pagesSmall Deeds Big RewardsNizmy NazeerNo ratings yet
- Lecture 2Document13 pagesLecture 2Efaz AfnanNo ratings yet
- Normal 5ff85655d4c99Document2 pagesNormal 5ff85655d4c99Abdul Basir SahebzadehNo ratings yet
- 5Mqs CH 6 - Python Fundamentals - 1 Q: Computer Science Annual Exam Chapter Wise Break Up of Questions For Annual ExamDocument4 pages5Mqs CH 6 - Python Fundamentals - 1 Q: Computer Science Annual Exam Chapter Wise Break Up of Questions For Annual ExamS. LakshanyaNo ratings yet
- Adaptive Control Systems Q PDocument4 pagesAdaptive Control Systems Q PSree MurthyNo ratings yet
- Control System MTTDocument3 pagesControl System MTTSonu BairwaNo ratings yet
- PDC HandoutDocument3 pagesPDC Handoutf20212587No ratings yet
- CS Lab MannualDocument2 pagesCS Lab Mannualsoumyadeep chakrabortyNo ratings yet
- Experiment 3Document7 pagesExperiment 3Usama NadeemNo ratings yet
- School of Engineering, Rmit UniversityDocument3 pagesSchool of Engineering, Rmit UniversityDhavalRavalNo ratings yet
- Modern Control Systems - Short Suggestion-2 / NAME / BUETDocument6 pagesModern Control Systems - Short Suggestion-2 / NAME / BUETAshifur RahamanNo ratings yet
- EE 340: Control Systems: Lab 9 Performance of The Second Order SystemsDocument18 pagesEE 340: Control Systems: Lab 9 Performance of The Second Order SystemsMuhammad AbbasiNo ratings yet
- Gujarat Technological University Biomedical EngineeringDocument3 pagesGujarat Technological University Biomedical EngineeringMandy745No ratings yet
- Lec 8Document50 pagesLec 8Karan ChawlaNo ratings yet
- Contol SystemsDocument4 pagesContol SystemsselvijeganNo ratings yet
- 1) Lao - Wase Wims HoDocument6 pages1) Lao - Wase Wims HoV JalandharNo ratings yet
- Lab TasksDocument53 pagesLab TasksAhmed SaeedNo ratings yet
- Ce All QuestionsDocument2 pagesCe All QuestionsHarsh ShahNo ratings yet
- CONTROL SYSTEM Lab ManualDocument17 pagesCONTROL SYSTEM Lab ManualMahavir ChavdaNo ratings yet
- Cs Lab Manual 31.05.14Document195 pagesCs Lab Manual 31.05.14sravanNo ratings yet
- MSC Project Report: Automatically Compute First-Order From Correspondence Property For Modal AxiomsDocument27 pagesMSC Project Report: Automatically Compute First-Order From Correspondence Property For Modal Axiomshussein-el-naggarNo ratings yet
- Inverted Pendulum State-Space Methods For Controller DesignDocument16 pagesInverted Pendulum State-Space Methods For Controller DesignReyes_nNo ratings yet
- 2.INTRO TO CTRL SYS - Oct2020 - Ruhizan EditDocument34 pages2.INTRO TO CTRL SYS - Oct2020 - Ruhizan EditMOHD ENDRA SHAFIQNo ratings yet
- Matlab Simulink For Control082pDocument39 pagesMatlab Simulink For Control082pWills TtaccaNo ratings yet
- Mannual 2020-21Document89 pagesMannual 2020-21MAMILLAPALLI VARA LAKSHMI NIT APNo ratings yet
- FCS QB EtcDocument9 pagesFCS QB EtcEyasu demsewNo ratings yet
- Control SystemsDocument160 pagesControl SystemsPintu DeyNo ratings yet
- Linear Systems Simulator ELP225Document7 pagesLinear Systems Simulator ELP225VipulNo ratings yet
- Basic Terminologies in Control System SystemDocument8 pagesBasic Terminologies in Control System SystemPandimadevi GanesanNo ratings yet
- Proces Control 11Document83 pagesProces Control 110a1l2i3.h4a5s6s7a8n9No ratings yet
- Calendar: Lec # Topics Key DatesDocument3 pagesCalendar: Lec # Topics Key DatesCoursePinNo ratings yet
- WWW - Manaresults.Co - In: II B. Tech II Semester Supplementary Examinations, Dec/Jan-2015-16 Control SystemsDocument1 pageWWW - Manaresults.Co - In: II B. Tech II Semester Supplementary Examinations, Dec/Jan-2015-16 Control SystemsneczuberbashaNo ratings yet
- Control System Guess PaperDocument35 pagesControl System Guess PaperSonu BairwaNo ratings yet
- Controlsystems 140517070433 Phpapp01Document12 pagesControlsystems 140517070433 Phpapp01Mehmood Khan MarwatNo ratings yet
- Controls Lab 2 PDFDocument3 pagesControls Lab 2 PDFShahpoor Khan WazirNo ratings yet
- EC305 ControlSystems SachitRao Aug2019Document3 pagesEC305 ControlSystems SachitRao Aug2019Akash PerlaNo ratings yet
- Assignment 2Document2 pagesAssignment 2Vatsheel SinghNo ratings yet
- Robust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationFrom EverandRobust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationNo ratings yet
- Mapp300 - 400-Eng V2 - 42 PDFDocument604 pagesMapp300 - 400-Eng V2 - 42 PDFTeh Boon Siang100% (1)
- X20 (C) BC0083-ENG V2.33Document6 pagesX20 (C) BC0083-ENG V2.33Teh Boon SiangNo ratings yet
- Full Design of A Low-Cost Quadrotor UAV by Student TeamDocument7 pagesFull Design of A Low-Cost Quadrotor UAV by Student TeamTeh Boon SiangNo ratings yet
- For All For Me For Me For Me For Me For Me: Two Can Dine Two Can DineDocument1 pageFor All For Me For Me For Me For Me For Me: Two Can Dine Two Can DineTeh Boon SiangNo ratings yet
- Visa LetterDocument1 pageVisa LetterTeh Boon SiangNo ratings yet
- 1.4 What Is Cfd?: M M ⟹ Ρva Dm Dt ∑F ⟹ F=Ma, M=Mv, Dm Dt D (Mv) DtDocument43 pages1.4 What Is Cfd?: M M ⟹ Ρva Dm Dt ∑F ⟹ F=Ma, M=Mv, Dm Dt D (Mv) DtTeh Boon SiangNo ratings yet
- Winter 2015 ScheduleDocument1 pageWinter 2015 ScheduleTeh Boon SiangNo ratings yet
- Carleton University AERO 4304: Computational Fluid Dynamics Assignment 1: Simulation of A Laminar Pipe FlowDocument2 pagesCarleton University AERO 4304: Computational Fluid Dynamics Assignment 1: Simulation of A Laminar Pipe FlowTeh Boon SiangNo ratings yet
- SatcomDocument11 pagesSatcomTeh Boon SiangNo ratings yet
- Assignment 1 SolutionDocument7 pagesAssignment 1 SolutionTeh Boon SiangNo ratings yet
- Extra Material For Tutorial 4Document2 pagesExtra Material For Tutorial 4Teh Boon SiangNo ratings yet
- Lecture No. 5 Present Worth Analysis 1.present Worth AnalysisDocument10 pagesLecture No. 5 Present Worth Analysis 1.present Worth AnalysisJuliusParejasLuceroNo ratings yet
- Deliverable 5 Marking SchemeDocument1 pageDeliverable 5 Marking SchemeTeh Boon SiangNo ratings yet
- CCDP 2100 Library Resources HandoutDocument6 pagesCCDP 2100 Library Resources HandoutTeh Boon SiangNo ratings yet