
Stability of Ships - 2
Stability of Ships - 2
You might also like
- Ship Stability Course Part 2Document41 pagesShip Stability Course Part 2Gilles MathieuNo ratings yet
- Module 2 Topic ListDocument40 pagesModule 2 Topic ListXtianeNo ratings yet
- NA Numericals PDFDocument29 pagesNA Numericals PDFsivaNo ratings yet
- Ship StabilityDocument38 pagesShip StabilityMuhammadIlhamNugrohoNo ratings yet
- A General Discussion On Ship StabilityDocument6 pagesA General Discussion On Ship StabilityAnonymous UCveMQNo ratings yet
- Introduction To TSSDocument11 pagesIntroduction To TSSnoczviviNo ratings yet
- DS Stability Questions 33p 298q PDFDocument33 pagesDS Stability Questions 33p 298q PDFVardiasNo ratings yet
- CD-0033 - Stability IDocument5 pagesCD-0033 - Stability Iandreea5993No ratings yet
- Ship Stability Course Part 4Document118 pagesShip Stability Course Part 4Gilles MathieuNo ratings yet
- 11.1.fuel Con - RevisedDocument82 pages11.1.fuel Con - RevisedsasikumarmarineNo ratings yet
- Damage StabilityDocument11 pagesDamage Stabilitypolaris2550% (2)
- 2022 DecemberDocument10 pages2022 DecemberRasika WickramarathnaNo ratings yet
- 3b Midterm Lms Seam 6Document90 pages3b Midterm Lms Seam 6Yhielmar Po SaburnidoNo ratings yet
- Assign No 3 GZ CurveDocument3 pagesAssign No 3 GZ CurveShikhar SwaroopNo ratings yet
- ET Inc Exp NotesDocument7 pagesET Inc Exp NotesOrville monteiroNo ratings yet
- StabilityDocument77 pagesStabilitybabissoul100% (3)
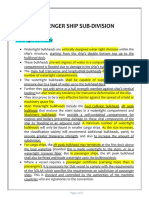
- 4.1 Passenger Ship Subdivision - 1-6pgDocument6 pages4.1 Passenger Ship Subdivision - 1-6pgoussama achouriNo ratings yet
- Adverse Stability: Check You Progress NameDocument3 pagesAdverse Stability: Check You Progress NameArun Ketu SethNo ratings yet
- Producing A Curve of Statical StabilityDocument8 pagesProducing A Curve of Statical Stabilityrsinha06089411No ratings yet
- Dry Docking and GroundingDocument14 pagesDry Docking and GroundingDerek NegreteNo ratings yet
- B) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsDocument6 pagesB) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsCezar100% (1)
- DTS - Ship Const & StabDocument12 pagesDTS - Ship Const & StabYASHKAR VERMA100% (3)
- List of GZ Curves To Be Looked Upon For Stability Exam SqaDocument2 pagesList of GZ Curves To Be Looked Upon For Stability Exam SqaithankjesusNo ratings yet
- LSSB Sets Test Questionnaires & Answer Sheet (Deck Officer)Document9 pagesLSSB Sets Test Questionnaires & Answer Sheet (Deck Officer)Rangga Surya Adi SetyaNo ratings yet
- Seam 2 Week 8 Stress Calculating Equipment LoadicatorDocument36 pagesSeam 2 Week 8 Stress Calculating Equipment LoadicatorSM11A3 -Cabusao, Kenneth JamesNo ratings yet
- Turning Circle NotesDocument6 pagesTurning Circle Notesss_tayadeNo ratings yet
- Guide 1 Basic StabilityDocument13 pagesGuide 1 Basic StabilityEisn 2020100% (1)
- Marine Exam 2 Answer KeyDocument3 pagesMarine Exam 2 Answer KeyPeter Marcellus EpeNo ratings yet
- Seamanship 6 Advanced Trim Stabilitystress CELTECHDocument128 pagesSeamanship 6 Advanced Trim Stabilitystress CELTECHasta YunoNo ratings yet
- Centre of Gravity and Centre of Buoyancy - 1461905132Document16 pagesCentre of Gravity and Centre of Buoyancy - 1461905132noczviviNo ratings yet
- 13 UKP GABUNGAN MATERI Manoever and Handle A Ship - 221214 - 105419Document67 pages13 UKP GABUNGAN MATERI Manoever and Handle A Ship - 221214 - 105419Dudi IsmunandarNo ratings yet
- Scotvec (Stabiltiy) Theory: Table of ContentsDocument25 pagesScotvec (Stabiltiy) Theory: Table of ContentsMohan KrishnanNo ratings yet
- 47 5815 MT222 2015 1 1 1 Ch.6 Transverse Statical Stability-ADocument23 pages47 5815 MT222 2015 1 1 1 Ch.6 Transverse Statical Stability-AManoj KumarNo ratings yet
- 3b Midterm LMS SEAM 6Document90 pages3b Midterm LMS SEAM 6Patrick CastroNo ratings yet
- Chapter 10 - Curves of Statical Stability (GZ Curves)Document9 pagesChapter 10 - Curves of Statical Stability (GZ Curves)Adrian B.100% (1)
- Question:-Resistance QuestionsDocument3 pagesQuestion:-Resistance Questionsaimri_cochinNo ratings yet
- Ph-1 TCN DGS Qs & Ans May'24 Rev3Document68 pagesPh-1 TCN DGS Qs & Ans May'24 Rev3annisharma1111No ratings yet
- MEO Class 4 Online Exam of Ship Construction.Document19 pagesMEO Class 4 Online Exam of Ship Construction.Ashwani KumarNo ratings yet
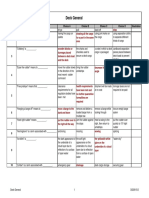
- Deck GeneralDocument211 pagesDeck GeneralKitkay NivramNo ratings yet
- 1 Seam 2 LM PrelimDocument64 pages1 Seam 2 LM PrelimTrestan TenegraNo ratings yet
- Final Safety1 ImportantDocument40 pagesFinal Safety1 ImportantAkhilvjohnNo ratings yet
- Rule 35 - Sound Signals inDocument31 pagesRule 35 - Sound Signals inMitch Speeder100% (1)
- Seam 5 Activity 9Document2 pagesSeam 5 Activity 9DarkxeiD100% (1)
- GZ Curves For Different Conditions, List LollDocument23 pagesGZ Curves For Different Conditions, List LollAbhishek PawarNo ratings yet
- BilgingDocument24 pagesBilgingsreedharsree45gmNo ratings yet
- MART 309 Ship Stability and Damage ControlDocument4 pagesMART 309 Ship Stability and Damage ControlRachel WrightNo ratings yet
- Trim TutorialDocument1 pageTrim TutorialClaudioNo ratings yet
- C - 3.1 Timber CargoDocument9 pagesC - 3.1 Timber CargoНикита НовикNo ratings yet
- 2-Trim Stability Booklet PDFDocument16 pages2-Trim Stability Booklet PDFsanthiniNo ratings yet
- Tanker Rdraft and Stability Problems and AnswersDocument4 pagesTanker Rdraft and Stability Problems and AnswersChristopherVillaltaNo ratings yet
- Module 1 - Dynamical StabilityDocument22 pagesModule 1 - Dynamical StabilityAjay W Dhiman100% (1)
- Floatation and Its Laws PDFDocument2 pagesFloatation and Its Laws PDFtarak das0% (1)
- Ship Stability: Damaged Stability of ShipsDocument11 pagesShip Stability: Damaged Stability of ShipsgeorgesagunaNo ratings yet
- 1.0 Movement of GDocument398 pages1.0 Movement of GГенна ФелексовNo ratings yet
- Ship Construction Theory Section I & II LAST UPDATED IN DEC 2023Document7 pagesShip Construction Theory Section I & II LAST UPDATED IN DEC 2023Ganesh MohiteNo ratings yet
- Basics On Marine NavigationDocument5 pagesBasics On Marine NavigationYowjess100% (1)
- Moments of Statical Stability PDFDocument1 pageMoments of Statical Stability PDFClaudioNo ratings yet
- Week 7 List 1 1 1Document11 pagesWeek 7 List 1 1 1MJ CabacabaNo ratings yet
- The Laws of Buoyancy and Initial Stability: Şekil 5.1. Forces Acting On A Displacement VesselDocument7 pagesThe Laws of Buoyancy and Initial Stability: Şekil 5.1. Forces Acting On A Displacement VesselRahul Phadake100% (1)
- Ship Hydrodynamics Lecture Notes Part 7 Propeller DesignDocument11 pagesShip Hydrodynamics Lecture Notes Part 7 Propeller Designmst405622No ratings yet
- New Welding Technologies in The ShipbuildingDocument2 pagesNew Welding Technologies in The ShipbuildingpothirajkalyanNo ratings yet
- Quality Planning and AnalysisDocument649 pagesQuality Planning and AnalysispothirajkalyanNo ratings yet
- Welding Technology - NPTELDocument145 pagesWelding Technology - NPTELpothirajkalyan100% (1)
- Dehumidification Application: Ehumidification in The Arine NdustryDocument2 pagesDehumidification Application: Ehumidification in The Arine NdustrypothirajkalyanNo ratings yet
- Homework M1: Bring Paper Copy of You Results To ClassDocument1 pageHomework M1: Bring Paper Copy of You Results To ClasspothirajkalyanNo ratings yet
- ME2029 Jig and Fixtues NOTESDocument47 pagesME2029 Jig and Fixtues NOTESpothirajkalyanNo ratings yet
- 2.2 StabilityDocument24 pages2.2 StabilitypothirajkalyanNo ratings yet
- 09-Hl47 Trim Optimisation - Sustainable SavingsDocument2 pages09-Hl47 Trim Optimisation - Sustainable SavingspothirajkalyanNo ratings yet
- Rationally-Based Structural Design: Owen HughesDocument46 pagesRationally-Based Structural Design: Owen HughespothirajkalyanNo ratings yet
- Loads On ShipsDocument6 pagesLoads On ShipspothirajkalyanNo ratings yet
- Unit 16 LP01PS - Intro Hydrocarbons and AlkanesDocument21 pagesUnit 16 LP01PS - Intro Hydrocarbons and AlkanespothirajkalyanNo ratings yet
- Internal Examinar External Examinar Internal Examinar External ExaminarDocument1 pageInternal Examinar External Examinar Internal Examinar External ExaminarpothirajkalyanNo ratings yet
- Introduction of Naval ArchitectureDocument5 pagesIntroduction of Naval ArchitecturepothirajkalyanNo ratings yet








































































Download as doc, pdf, or txt
You might also like
- Ship Stability Course Part 2Document41 pagesShip Stability Course Part 2Gilles MathieuNo ratings yet
- Module 2 Topic ListDocument40 pagesModule 2 Topic ListXtianeNo ratings yet
- NA Numericals PDFDocument29 pagesNA Numericals PDFsivaNo ratings yet
- Ship StabilityDocument38 pagesShip StabilityMuhammadIlhamNugrohoNo ratings yet
- A General Discussion On Ship StabilityDocument6 pagesA General Discussion On Ship StabilityAnonymous UCveMQNo ratings yet
- Introduction To TSSDocument11 pagesIntroduction To TSSnoczviviNo ratings yet
- DS Stability Questions 33p 298q PDFDocument33 pagesDS Stability Questions 33p 298q PDFVardiasNo ratings yet
- CD-0033 - Stability IDocument5 pagesCD-0033 - Stability Iandreea5993No ratings yet
- Ship Stability Course Part 4Document118 pagesShip Stability Course Part 4Gilles MathieuNo ratings yet
- 11.1.fuel Con - RevisedDocument82 pages11.1.fuel Con - RevisedsasikumarmarineNo ratings yet
- Damage StabilityDocument11 pagesDamage Stabilitypolaris2550% (2)
- 2022 DecemberDocument10 pages2022 DecemberRasika WickramarathnaNo ratings yet
- 3b Midterm Lms Seam 6Document90 pages3b Midterm Lms Seam 6Yhielmar Po SaburnidoNo ratings yet
- Assign No 3 GZ CurveDocument3 pagesAssign No 3 GZ CurveShikhar SwaroopNo ratings yet
- ET Inc Exp NotesDocument7 pagesET Inc Exp NotesOrville monteiroNo ratings yet
- StabilityDocument77 pagesStabilitybabissoul100% (3)
- 4.1 Passenger Ship Subdivision - 1-6pgDocument6 pages4.1 Passenger Ship Subdivision - 1-6pgoussama achouriNo ratings yet
- Adverse Stability: Check You Progress NameDocument3 pagesAdverse Stability: Check You Progress NameArun Ketu SethNo ratings yet
- Producing A Curve of Statical StabilityDocument8 pagesProducing A Curve of Statical Stabilityrsinha06089411No ratings yet
- Dry Docking and GroundingDocument14 pagesDry Docking and GroundingDerek NegreteNo ratings yet
- B) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsDocument6 pagesB) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsCezar100% (1)
- DTS - Ship Const & StabDocument12 pagesDTS - Ship Const & StabYASHKAR VERMA100% (3)
- List of GZ Curves To Be Looked Upon For Stability Exam SqaDocument2 pagesList of GZ Curves To Be Looked Upon For Stability Exam SqaithankjesusNo ratings yet
- LSSB Sets Test Questionnaires & Answer Sheet (Deck Officer)Document9 pagesLSSB Sets Test Questionnaires & Answer Sheet (Deck Officer)Rangga Surya Adi SetyaNo ratings yet
- Seam 2 Week 8 Stress Calculating Equipment LoadicatorDocument36 pagesSeam 2 Week 8 Stress Calculating Equipment LoadicatorSM11A3 -Cabusao, Kenneth JamesNo ratings yet
- Turning Circle NotesDocument6 pagesTurning Circle Notesss_tayadeNo ratings yet
- Guide 1 Basic StabilityDocument13 pagesGuide 1 Basic StabilityEisn 2020100% (1)
- Marine Exam 2 Answer KeyDocument3 pagesMarine Exam 2 Answer KeyPeter Marcellus EpeNo ratings yet
- Seamanship 6 Advanced Trim Stabilitystress CELTECHDocument128 pagesSeamanship 6 Advanced Trim Stabilitystress CELTECHasta YunoNo ratings yet
- Centre of Gravity and Centre of Buoyancy - 1461905132Document16 pagesCentre of Gravity and Centre of Buoyancy - 1461905132noczviviNo ratings yet
- 13 UKP GABUNGAN MATERI Manoever and Handle A Ship - 221214 - 105419Document67 pages13 UKP GABUNGAN MATERI Manoever and Handle A Ship - 221214 - 105419Dudi IsmunandarNo ratings yet
- Scotvec (Stabiltiy) Theory: Table of ContentsDocument25 pagesScotvec (Stabiltiy) Theory: Table of ContentsMohan KrishnanNo ratings yet
- 47 5815 MT222 2015 1 1 1 Ch.6 Transverse Statical Stability-ADocument23 pages47 5815 MT222 2015 1 1 1 Ch.6 Transverse Statical Stability-AManoj KumarNo ratings yet
- 3b Midterm LMS SEAM 6Document90 pages3b Midterm LMS SEAM 6Patrick CastroNo ratings yet
- Chapter 10 - Curves of Statical Stability (GZ Curves)Document9 pagesChapter 10 - Curves of Statical Stability (GZ Curves)Adrian B.100% (1)
- Question:-Resistance QuestionsDocument3 pagesQuestion:-Resistance Questionsaimri_cochinNo ratings yet
- Ph-1 TCN DGS Qs & Ans May'24 Rev3Document68 pagesPh-1 TCN DGS Qs & Ans May'24 Rev3annisharma1111No ratings yet
- MEO Class 4 Online Exam of Ship Construction.Document19 pagesMEO Class 4 Online Exam of Ship Construction.Ashwani KumarNo ratings yet
- Deck GeneralDocument211 pagesDeck GeneralKitkay NivramNo ratings yet
- 1 Seam 2 LM PrelimDocument64 pages1 Seam 2 LM PrelimTrestan TenegraNo ratings yet
- Final Safety1 ImportantDocument40 pagesFinal Safety1 ImportantAkhilvjohnNo ratings yet
- Rule 35 - Sound Signals inDocument31 pagesRule 35 - Sound Signals inMitch Speeder100% (1)
- Seam 5 Activity 9Document2 pagesSeam 5 Activity 9DarkxeiD100% (1)
- GZ Curves For Different Conditions, List LollDocument23 pagesGZ Curves For Different Conditions, List LollAbhishek PawarNo ratings yet
- BilgingDocument24 pagesBilgingsreedharsree45gmNo ratings yet
- MART 309 Ship Stability and Damage ControlDocument4 pagesMART 309 Ship Stability and Damage ControlRachel WrightNo ratings yet
- Trim TutorialDocument1 pageTrim TutorialClaudioNo ratings yet
- C - 3.1 Timber CargoDocument9 pagesC - 3.1 Timber CargoНикита НовикNo ratings yet
- 2-Trim Stability Booklet PDFDocument16 pages2-Trim Stability Booklet PDFsanthiniNo ratings yet
- Tanker Rdraft and Stability Problems and AnswersDocument4 pagesTanker Rdraft and Stability Problems and AnswersChristopherVillaltaNo ratings yet
- Module 1 - Dynamical StabilityDocument22 pagesModule 1 - Dynamical StabilityAjay W Dhiman100% (1)
- Floatation and Its Laws PDFDocument2 pagesFloatation and Its Laws PDFtarak das0% (1)
- Ship Stability: Damaged Stability of ShipsDocument11 pagesShip Stability: Damaged Stability of ShipsgeorgesagunaNo ratings yet
- 1.0 Movement of GDocument398 pages1.0 Movement of GГенна ФелексовNo ratings yet
- Ship Construction Theory Section I & II LAST UPDATED IN DEC 2023Document7 pagesShip Construction Theory Section I & II LAST UPDATED IN DEC 2023Ganesh MohiteNo ratings yet
- Basics On Marine NavigationDocument5 pagesBasics On Marine NavigationYowjess100% (1)
- Moments of Statical Stability PDFDocument1 pageMoments of Statical Stability PDFClaudioNo ratings yet
- Week 7 List 1 1 1Document11 pagesWeek 7 List 1 1 1MJ CabacabaNo ratings yet
- The Laws of Buoyancy and Initial Stability: Şekil 5.1. Forces Acting On A Displacement VesselDocument7 pagesThe Laws of Buoyancy and Initial Stability: Şekil 5.1. Forces Acting On A Displacement VesselRahul Phadake100% (1)
- Ship Hydrodynamics Lecture Notes Part 7 Propeller DesignDocument11 pagesShip Hydrodynamics Lecture Notes Part 7 Propeller Designmst405622No ratings yet
- New Welding Technologies in The ShipbuildingDocument2 pagesNew Welding Technologies in The ShipbuildingpothirajkalyanNo ratings yet
- Quality Planning and AnalysisDocument649 pagesQuality Planning and AnalysispothirajkalyanNo ratings yet
- Welding Technology - NPTELDocument145 pagesWelding Technology - NPTELpothirajkalyan100% (1)
- Dehumidification Application: Ehumidification in The Arine NdustryDocument2 pagesDehumidification Application: Ehumidification in The Arine NdustrypothirajkalyanNo ratings yet
- Homework M1: Bring Paper Copy of You Results To ClassDocument1 pageHomework M1: Bring Paper Copy of You Results To ClasspothirajkalyanNo ratings yet
- ME2029 Jig and Fixtues NOTESDocument47 pagesME2029 Jig and Fixtues NOTESpothirajkalyanNo ratings yet
- 2.2 StabilityDocument24 pages2.2 StabilitypothirajkalyanNo ratings yet
- 09-Hl47 Trim Optimisation - Sustainable SavingsDocument2 pages09-Hl47 Trim Optimisation - Sustainable SavingspothirajkalyanNo ratings yet
- Rationally-Based Structural Design: Owen HughesDocument46 pagesRationally-Based Structural Design: Owen HughespothirajkalyanNo ratings yet
- Loads On ShipsDocument6 pagesLoads On ShipspothirajkalyanNo ratings yet
- Unit 16 LP01PS - Intro Hydrocarbons and AlkanesDocument21 pagesUnit 16 LP01PS - Intro Hydrocarbons and AlkanespothirajkalyanNo ratings yet
- Internal Examinar External Examinar Internal Examinar External ExaminarDocument1 pageInternal Examinar External Examinar Internal Examinar External ExaminarpothirajkalyanNo ratings yet
- Introduction of Naval ArchitectureDocument5 pagesIntroduction of Naval ArchitecturepothirajkalyanNo ratings yet