
AC Motor Protection
AC Motor Protection
You might also like
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsFrom EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 4 out of 5 stars4/5 (2)
- Substation Automation Systems: Design and ImplementationFrom EverandSubstation Automation Systems: Design and ImplementationRating: 4.5 out of 5 stars4.5/5 (3)
- Components of HVDCDocument138 pagesComponents of HVDCbenNo ratings yet
- 16-Transformer and Transformer Feeder ProtDocument26 pages16-Transformer and Transformer Feeder ProtSristick100% (4)
- 13-Protection of Complex TransmissionDocument16 pages13-Protection of Complex TransmissionSristick100% (2)
- 12-Distance Protection SchemesDocument9 pages12-Distance Protection SchemesSristick100% (1)
- 15 Busbar ProtectionDocument21 pages15 Busbar ProtectionSristick100% (8)
- 06-Current and VoltageDocument19 pages06-Current and VoltageSristick100% (2)
- SEPAM S80 - Transformer Differential ANSI 87T PDFDocument38 pagesSEPAM S80 - Transformer Differential ANSI 87T PDFMartin KakartinNo ratings yet
- Protection PhilosophyDocument50 pagesProtection Philosophyrohan sainiNo ratings yet
- Voltage Transformers Type UMZDocument25 pagesVoltage Transformers Type UMZpattarawatNo ratings yet
- Transformer Protection Relaying SchemeDocument18 pagesTransformer Protection Relaying SchemeCris Angeles100% (1)
- Generator Protection - FDocument70 pagesGenerator Protection - Fengrsmabbasrizvi100% (3)
- Dimensioning of Current Transformers For Protection ApplicationsDocument9 pagesDimensioning of Current Transformers For Protection Applicationsprabhu_natarajan_n100% (1)
- 09-Overcurrent ProtectionDocument30 pages09-Overcurrent ProtectionSristick83% (6)
- Motor Protection ManualDocument20 pagesMotor Protection ManualNirmal mehtaNo ratings yet
- 08-Protection Signalling and TrippingDocument10 pages08-Protection Signalling and TrippingSristick100% (2)
- 20-Protection of AC Elec RailDocument18 pages20-Protection of AC Elec RailSristick100% (3)
- MCAGDocument5 pagesMCAGariptrNo ratings yet
- REF 615 Protection Applications - Part - 3Document24 pagesREF 615 Protection Applications - Part - 3burkinafasoglu100% (1)
- 21-Relay Testing and CommissioningDocument28 pages21-Relay Testing and CommissioningSristick100% (4)
- Inter Trip RelayDocument10 pagesInter Trip RelayNam Hoai Le100% (1)
- Interposing Current Transformers: For Use in Conjunction With Type MBCH Transformer Differential ProtectionDocument12 pagesInterposing Current Transformers: For Use in Conjunction With Type MBCH Transformer Differential ProtectionChristopher Mouly100% (2)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Network Protection and Automation GuideDocument16 pagesNetwork Protection and Automation GuideMoe MoeNo ratings yet
- C9 A.C. Motor ProtectionDocument18 pagesC9 A.C. Motor ProtectionShailesh ChettyNo ratings yet
- 6 Paper Clasificacion de FallasDocument8 pages6 Paper Clasificacion de FallasErick ABNo ratings yet
- Motor Circuit Protector Cuttler HammerDocument4 pagesMotor Circuit Protector Cuttler Hammereastsider910No ratings yet
- MPPT Solar Charge Controller ML4830N15 InstructionsDocument13 pagesMPPT Solar Charge Controller ML4830N15 InstructionsR techNo ratings yet
- MOTRPROTDocument14 pagesMOTRPROTWendy DuncanNo ratings yet
- Why Using MCCB Instead of Fuses PDFDocument4 pagesWhy Using MCCB Instead of Fuses PDF123peniscolaNo ratings yet
- MiniECO MiniECO PLUS Installation Manual Rev 5.0 enDocument56 pagesMiniECO MiniECO PLUS Installation Manual Rev 5.0 ensauliakNo ratings yet
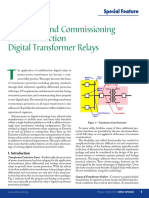
- Protection and Commissioning of Multifunction Digital Transformer RelaysDocument13 pagesProtection and Commissioning of Multifunction Digital Transformer Relaysrobertovm2002No ratings yet
- MOZINA - Upgrading The Protection of Industrialsized Generators Using DigDocument8 pagesMOZINA - Upgrading The Protection of Industrialsized Generators Using DigAngel De la CruzNo ratings yet
- Lec 4 & 5 - Power System ProtectionDocument35 pagesLec 4 & 5 - Power System ProtectionAwil MohamedNo ratings yet
- ECO TECH EVO Man Install - ENDocument82 pagesECO TECH EVO Man Install - ENLeszek Leszek100% (1)
- Power System ProtectionDocument35 pagesPower System ProtectionSandipan MukherjeeNo ratings yet
- Relay SchneiderDocument797 pagesRelay SchneiderBảo NguyễnNo ratings yet
- Protection of SubstationDocument11 pagesProtection of Substationmostafa HusseinNo ratings yet
- Cargador SLT100Document24 pagesCargador SLT100JeremyNo ratings yet
- Mircharge 48vDocument34 pagesMircharge 48vAkhil ThankachanNo ratings yet
- Sunica Ni-Cd Battery Technical ManualDocument29 pagesSunica Ni-Cd Battery Technical ManualKHAYAM1982No ratings yet
- Application Notes For Micom P12X High Impedance ProtectionDocument29 pagesApplication Notes For Micom P12X High Impedance ProtectionHaleelu Abdul Jaleel100% (1)
- Instructions For Use and MaintenanceDocument20 pagesInstructions For Use and MaintenanceAli HashemiNo ratings yet
- Generator ProtectionDocument11 pagesGenerator ProtectionquadriakinwandeNo ratings yet
- B3-Industrial and Commercial Power System ProtectionDocument24 pagesB3-Industrial and Commercial Power System ProtectionShailesh ChettyNo ratings yet
- Basler Transformer Protection Application Guide PDFDocument33 pagesBasler Transformer Protection Application Guide PDFAbrakain69No ratings yet
- SIMOREG As A Field Supply Unit PDFDocument16 pagesSIMOREG As A Field Supply Unit PDFRafaelNo ratings yet
- 9011 Digi-Tig 200 Acdc PFC MVDocument32 pages9011 Digi-Tig 200 Acdc PFC MVamrNo ratings yet
- E20s ScrubberDocument64 pagesE20s ScrubberGreg ThoelenNo ratings yet
- C8 Generator and Generator-Transformer ProtectionDocument46 pagesC8 Generator and Generator-Transformer ProtectionShailesh Chetty50% (2)
- User Manual - MPPT - MC4870N15 1.01Document12 pagesUser Manual - MPPT - MC4870N15 1.01fopoku2k2No ratings yet
- Synchronous Generator ManualDocument56 pagesSynchronous Generator ManualMartin Kratky100% (4)
- Review of Loss of Excitation Protection Setting and Coordination To The Generator Capacity CurveDocument6 pagesReview of Loss of Excitation Protection Setting and Coordination To The Generator Capacity CurveAditya Ainul HaqiqiNo ratings yet
- Basic Knowledge For Protection in The Event of Overload and Short CircuitDocument24 pagesBasic Knowledge For Protection in The Event of Overload and Short CircuitMuthu KumarNo ratings yet
- Electrical Machine DrawingDocument4 pagesElectrical Machine DrawingSristickNo ratings yet
- MosfetDocument13 pagesMosfetSristick100% (3)
- 12-Distance Protection SchemesDocument9 pages12-Distance Protection SchemesSristick100% (1)
- 15 Busbar ProtectionDocument21 pages15 Busbar ProtectionSristick100% (8)
- 24-Substation Control and AutomationDocument20 pages24-Substation Control and AutomationSristick90% (10)
- 23 Power QualityDocument11 pages23 Power QualitySristick100% (1)
- 22-Power Systems MeasurementsDocument11 pages22-Power Systems Measurementsapi-3769988No ratings yet
- 16-Transformer and Transformer Feeder ProtDocument26 pages16-Transformer and Transformer Feeder ProtSristick100% (4)
- 21-Relay Testing and CommissioningDocument28 pages21-Relay Testing and CommissioningSristick100% (4)
- 20-Protection of AC Elec RailDocument18 pages20-Protection of AC Elec RailSristick100% (3)
- 13-Protection of Complex TransmissionDocument16 pages13-Protection of Complex TransmissionSristick100% (2)
- 08-Protection Signalling and TrippingDocument10 pages08-Protection Signalling and TrippingSristick100% (2)
- 10 Unit ProtectionDocument18 pages10 Unit ProtectionSristick100% (1)
- 09-Overcurrent ProtectionDocument30 pages09-Overcurrent ProtectionSristick83% (6)
- 11 Distance ProtectionDocument22 pages11 Distance ProtectionSristick100% (1)
- 07-Relay TechnologyDocument13 pages07-Relay Technologyapi-3769988No ratings yet
- Protection FundamentalsDocument12 pagesProtection FundamentalsGeorge AsuncionNo ratings yet
- 01 IntroductionDocument1 page01 Introductionapi-3697422No ratings yet
- Power AmplifierDocument37 pagesPower AmplifierSristick100% (6)
- 06-Current and VoltageDocument19 pages06-Current and VoltageSristick100% (2)
- 114 Handy Formulae For Quantitative Aptitude ProblemsDocument12 pages114 Handy Formulae For Quantitative Aptitude ProblemsRaju.Konduru91% (69)
- Power AmplifierDocument37 pagesPower AmplifierSristick100% (6)
- 5 Data Link LayerDocument63 pages5 Data Link LayerSristick100% (4)
- GN2470Document5 pagesGN2470Alejandro BandaNo ratings yet
- Computer Networks and The InternetDocument66 pagesComputer Networks and The InternetSristickNo ratings yet
- TCP & UdpDocument1 pageTCP & UdpSristickNo ratings yet
- DKDDPB909A222 NXP Liquid Cooled LRDocument24 pagesDKDDPB909A222 NXP Liquid Cooled LRjosipNo ratings yet
- R32 Service Manual Blanc CompressedDocument94 pagesR32 Service Manual Blanc CompressedSơn PhạmNo ratings yet
- Machine 2 Lab Exp 6Document11 pagesMachine 2 Lab Exp 6Ahmed Bin MustafaNo ratings yet
- Print - Udyam Registration CertificateDocument1 pagePrint - Udyam Registration CertificateFredric SolomonNo ratings yet
- 2csc004033b0201 ABBDocument28 pages2csc004033b0201 ABBPham HoaNo ratings yet
- Ricoh 2090Document832 pagesRicoh 2090cosmin176100% (1)
- THM Multimark Plus enDocument2 pagesTHM Multimark Plus entamir testNo ratings yet
- B000306 BW 2014 12 BMW TC ListDocument3 pagesB000306 BW 2014 12 BMW TC Listtho huynhtanNo ratings yet
- 16 I61E - TemBreak2 Cat PDFDocument204 pages16 I61E - TemBreak2 Cat PDFShudhan NambiarNo ratings yet
- MS 6.3 ECU - 2.8L Engine - v02Document15 pagesMS 6.3 ECU - 2.8L Engine - v02pankituna5487No ratings yet
- Controller 6610 Data SheetDocument2 pagesController 6610 Data SheetGhizlane Mounjim100% (2)
- ISBN: 1-61481-056-8 Pages: 67: ANSI/AGMA 6025-D98Document1 pageISBN: 1-61481-056-8 Pages: 67: ANSI/AGMA 6025-D98gioNo ratings yet
- Zip Tie Domes - 3V 3/8 Assembly Manual: Instructions For Assembling The 25 Foot 3V 3/8 Frequency Geodesic DomeDocument33 pagesZip Tie Domes - 3V 3/8 Assembly Manual: Instructions For Assembling The 25 Foot 3V 3/8 Frequency Geodesic DomemarinerNo ratings yet
- Owner'S Service Manual: LIT-11626-35-29 B4X-2819U-10Document278 pagesOwner'S Service Manual: LIT-11626-35-29 B4X-2819U-10Amin SobirinNo ratings yet
- Overhead Crane Inspeksi BerkalaDocument4 pagesOverhead Crane Inspeksi BerkalaWerman Septian100% (1)
- 4-6. Instrument Thread & Weld Fittings (2023)Document12 pages4-6. Instrument Thread & Weld Fittings (2023)Soft IcecreamNo ratings yet
- DRG ListDocument272 pagesDRG ListVijay PalNo ratings yet
- SIP 2019 FinalDocument20 pagesSIP 2019 FinalAlexa Febiejoy SespeneNo ratings yet
- Vp-15-109-001-A01-P-237-004abc-D-006 Data Sheet For Steam TurbineDocument4 pagesVp-15-109-001-A01-P-237-004abc-D-006 Data Sheet For Steam TurbineRicardo NapitupuluNo ratings yet
- Cebu Car Rental - Rent A Car in Cebu - Newest Cars at Lowest Rates.Document20 pagesCebu Car Rental - Rent A Car in Cebu - Newest Cars at Lowest Rates.cebucar rentalNo ratings yet
- Hisn A' Shumookh Royal Court AffairsDocument2 pagesHisn A' Shumookh Royal Court AffairsSiva NandhamNo ratings yet
- Sole Diesel Despiece - M17!26!29Document71 pagesSole Diesel Despiece - M17!26!29hackisblackNo ratings yet
- Folder Fiamm Neptune 2010 EngDocument4 pagesFolder Fiamm Neptune 2010 EngchokribNo ratings yet
- Sel1.5b eDocument27 pagesSel1.5b eaaditsivaprakashNo ratings yet
- Pp83036by - 1106a-70tgDocument172 pagesPp83036by - 1106a-70tgJORGE JOSSUE OLIVARES PARDO100% (1)
- 0 PRO Mira440 Mira440 SF ENDocument8 pages0 PRO Mira440 Mira440 SF ENlyxuandatbkNo ratings yet
- KSB RioRioZDocument32 pagesKSB RioRioZSrdjanNo ratings yet
- Dental ChairDocument12 pagesDental Chairallan espinoNo ratings yet
- CSG TBG Dimensions PDFDocument3 pagesCSG TBG Dimensions PDFElisa Maria Angulo VanegasNo ratings yet





































































































Download as pdf or txt
You might also like
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsFrom EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 4 out of 5 stars4/5 (2)
- Substation Automation Systems: Design and ImplementationFrom EverandSubstation Automation Systems: Design and ImplementationRating: 4.5 out of 5 stars4.5/5 (3)
- Components of HVDCDocument138 pagesComponents of HVDCbenNo ratings yet
- 16-Transformer and Transformer Feeder ProtDocument26 pages16-Transformer and Transformer Feeder ProtSristick100% (4)
- 13-Protection of Complex TransmissionDocument16 pages13-Protection of Complex TransmissionSristick100% (2)
- 12-Distance Protection SchemesDocument9 pages12-Distance Protection SchemesSristick100% (1)
- 15 Busbar ProtectionDocument21 pages15 Busbar ProtectionSristick100% (8)
- 06-Current and VoltageDocument19 pages06-Current and VoltageSristick100% (2)
- SEPAM S80 - Transformer Differential ANSI 87T PDFDocument38 pagesSEPAM S80 - Transformer Differential ANSI 87T PDFMartin KakartinNo ratings yet
- Protection PhilosophyDocument50 pagesProtection Philosophyrohan sainiNo ratings yet
- Voltage Transformers Type UMZDocument25 pagesVoltage Transformers Type UMZpattarawatNo ratings yet
- Transformer Protection Relaying SchemeDocument18 pagesTransformer Protection Relaying SchemeCris Angeles100% (1)
- Generator Protection - FDocument70 pagesGenerator Protection - Fengrsmabbasrizvi100% (3)
- Dimensioning of Current Transformers For Protection ApplicationsDocument9 pagesDimensioning of Current Transformers For Protection Applicationsprabhu_natarajan_n100% (1)
- 09-Overcurrent ProtectionDocument30 pages09-Overcurrent ProtectionSristick83% (6)
- Motor Protection ManualDocument20 pagesMotor Protection ManualNirmal mehtaNo ratings yet
- 08-Protection Signalling and TrippingDocument10 pages08-Protection Signalling and TrippingSristick100% (2)
- 20-Protection of AC Elec RailDocument18 pages20-Protection of AC Elec RailSristick100% (3)
- MCAGDocument5 pagesMCAGariptrNo ratings yet
- REF 615 Protection Applications - Part - 3Document24 pagesREF 615 Protection Applications - Part - 3burkinafasoglu100% (1)
- 21-Relay Testing and CommissioningDocument28 pages21-Relay Testing and CommissioningSristick100% (4)
- Inter Trip RelayDocument10 pagesInter Trip RelayNam Hoai Le100% (1)
- Interposing Current Transformers: For Use in Conjunction With Type MBCH Transformer Differential ProtectionDocument12 pagesInterposing Current Transformers: For Use in Conjunction With Type MBCH Transformer Differential ProtectionChristopher Mouly100% (2)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Network Protection and Automation GuideDocument16 pagesNetwork Protection and Automation GuideMoe MoeNo ratings yet
- C9 A.C. Motor ProtectionDocument18 pagesC9 A.C. Motor ProtectionShailesh ChettyNo ratings yet
- 6 Paper Clasificacion de FallasDocument8 pages6 Paper Clasificacion de FallasErick ABNo ratings yet
- Motor Circuit Protector Cuttler HammerDocument4 pagesMotor Circuit Protector Cuttler Hammereastsider910No ratings yet
- MPPT Solar Charge Controller ML4830N15 InstructionsDocument13 pagesMPPT Solar Charge Controller ML4830N15 InstructionsR techNo ratings yet
- MOTRPROTDocument14 pagesMOTRPROTWendy DuncanNo ratings yet
- Why Using MCCB Instead of Fuses PDFDocument4 pagesWhy Using MCCB Instead of Fuses PDF123peniscolaNo ratings yet
- MiniECO MiniECO PLUS Installation Manual Rev 5.0 enDocument56 pagesMiniECO MiniECO PLUS Installation Manual Rev 5.0 ensauliakNo ratings yet
- Protection and Commissioning of Multifunction Digital Transformer RelaysDocument13 pagesProtection and Commissioning of Multifunction Digital Transformer Relaysrobertovm2002No ratings yet
- MOZINA - Upgrading The Protection of Industrialsized Generators Using DigDocument8 pagesMOZINA - Upgrading The Protection of Industrialsized Generators Using DigAngel De la CruzNo ratings yet
- Lec 4 & 5 - Power System ProtectionDocument35 pagesLec 4 & 5 - Power System ProtectionAwil MohamedNo ratings yet
- ECO TECH EVO Man Install - ENDocument82 pagesECO TECH EVO Man Install - ENLeszek Leszek100% (1)
- Power System ProtectionDocument35 pagesPower System ProtectionSandipan MukherjeeNo ratings yet
- Relay SchneiderDocument797 pagesRelay SchneiderBảo NguyễnNo ratings yet
- Protection of SubstationDocument11 pagesProtection of Substationmostafa HusseinNo ratings yet
- Cargador SLT100Document24 pagesCargador SLT100JeremyNo ratings yet
- Mircharge 48vDocument34 pagesMircharge 48vAkhil ThankachanNo ratings yet
- Sunica Ni-Cd Battery Technical ManualDocument29 pagesSunica Ni-Cd Battery Technical ManualKHAYAM1982No ratings yet
- Application Notes For Micom P12X High Impedance ProtectionDocument29 pagesApplication Notes For Micom P12X High Impedance ProtectionHaleelu Abdul Jaleel100% (1)
- Instructions For Use and MaintenanceDocument20 pagesInstructions For Use and MaintenanceAli HashemiNo ratings yet
- Generator ProtectionDocument11 pagesGenerator ProtectionquadriakinwandeNo ratings yet
- B3-Industrial and Commercial Power System ProtectionDocument24 pagesB3-Industrial and Commercial Power System ProtectionShailesh ChettyNo ratings yet
- Basler Transformer Protection Application Guide PDFDocument33 pagesBasler Transformer Protection Application Guide PDFAbrakain69No ratings yet
- SIMOREG As A Field Supply Unit PDFDocument16 pagesSIMOREG As A Field Supply Unit PDFRafaelNo ratings yet
- 9011 Digi-Tig 200 Acdc PFC MVDocument32 pages9011 Digi-Tig 200 Acdc PFC MVamrNo ratings yet
- E20s ScrubberDocument64 pagesE20s ScrubberGreg ThoelenNo ratings yet
- C8 Generator and Generator-Transformer ProtectionDocument46 pagesC8 Generator and Generator-Transformer ProtectionShailesh Chetty50% (2)
- User Manual - MPPT - MC4870N15 1.01Document12 pagesUser Manual - MPPT - MC4870N15 1.01fopoku2k2No ratings yet
- Synchronous Generator ManualDocument56 pagesSynchronous Generator ManualMartin Kratky100% (4)
- Review of Loss of Excitation Protection Setting and Coordination To The Generator Capacity CurveDocument6 pagesReview of Loss of Excitation Protection Setting and Coordination To The Generator Capacity CurveAditya Ainul HaqiqiNo ratings yet
- Basic Knowledge For Protection in The Event of Overload and Short CircuitDocument24 pagesBasic Knowledge For Protection in The Event of Overload and Short CircuitMuthu KumarNo ratings yet
- Electrical Machine DrawingDocument4 pagesElectrical Machine DrawingSristickNo ratings yet
- MosfetDocument13 pagesMosfetSristick100% (3)
- 12-Distance Protection SchemesDocument9 pages12-Distance Protection SchemesSristick100% (1)
- 15 Busbar ProtectionDocument21 pages15 Busbar ProtectionSristick100% (8)
- 24-Substation Control and AutomationDocument20 pages24-Substation Control and AutomationSristick90% (10)
- 23 Power QualityDocument11 pages23 Power QualitySristick100% (1)
- 22-Power Systems MeasurementsDocument11 pages22-Power Systems Measurementsapi-3769988No ratings yet
- 16-Transformer and Transformer Feeder ProtDocument26 pages16-Transformer and Transformer Feeder ProtSristick100% (4)
- 21-Relay Testing and CommissioningDocument28 pages21-Relay Testing and CommissioningSristick100% (4)
- 20-Protection of AC Elec RailDocument18 pages20-Protection of AC Elec RailSristick100% (3)
- 13-Protection of Complex TransmissionDocument16 pages13-Protection of Complex TransmissionSristick100% (2)
- 08-Protection Signalling and TrippingDocument10 pages08-Protection Signalling and TrippingSristick100% (2)
- 10 Unit ProtectionDocument18 pages10 Unit ProtectionSristick100% (1)
- 09-Overcurrent ProtectionDocument30 pages09-Overcurrent ProtectionSristick83% (6)
- 11 Distance ProtectionDocument22 pages11 Distance ProtectionSristick100% (1)
- 07-Relay TechnologyDocument13 pages07-Relay Technologyapi-3769988No ratings yet
- Protection FundamentalsDocument12 pagesProtection FundamentalsGeorge AsuncionNo ratings yet
- 01 IntroductionDocument1 page01 Introductionapi-3697422No ratings yet
- Power AmplifierDocument37 pagesPower AmplifierSristick100% (6)
- 06-Current and VoltageDocument19 pages06-Current and VoltageSristick100% (2)
- 114 Handy Formulae For Quantitative Aptitude ProblemsDocument12 pages114 Handy Formulae For Quantitative Aptitude ProblemsRaju.Konduru91% (69)
- Power AmplifierDocument37 pagesPower AmplifierSristick100% (6)
- 5 Data Link LayerDocument63 pages5 Data Link LayerSristick100% (4)
- GN2470Document5 pagesGN2470Alejandro BandaNo ratings yet
- Computer Networks and The InternetDocument66 pagesComputer Networks and The InternetSristickNo ratings yet
- TCP & UdpDocument1 pageTCP & UdpSristickNo ratings yet
- DKDDPB909A222 NXP Liquid Cooled LRDocument24 pagesDKDDPB909A222 NXP Liquid Cooled LRjosipNo ratings yet
- R32 Service Manual Blanc CompressedDocument94 pagesR32 Service Manual Blanc CompressedSơn PhạmNo ratings yet
- Machine 2 Lab Exp 6Document11 pagesMachine 2 Lab Exp 6Ahmed Bin MustafaNo ratings yet
- Print - Udyam Registration CertificateDocument1 pagePrint - Udyam Registration CertificateFredric SolomonNo ratings yet
- 2csc004033b0201 ABBDocument28 pages2csc004033b0201 ABBPham HoaNo ratings yet
- Ricoh 2090Document832 pagesRicoh 2090cosmin176100% (1)
- THM Multimark Plus enDocument2 pagesTHM Multimark Plus entamir testNo ratings yet
- B000306 BW 2014 12 BMW TC ListDocument3 pagesB000306 BW 2014 12 BMW TC Listtho huynhtanNo ratings yet
- 16 I61E - TemBreak2 Cat PDFDocument204 pages16 I61E - TemBreak2 Cat PDFShudhan NambiarNo ratings yet
- MS 6.3 ECU - 2.8L Engine - v02Document15 pagesMS 6.3 ECU - 2.8L Engine - v02pankituna5487No ratings yet
- Controller 6610 Data SheetDocument2 pagesController 6610 Data SheetGhizlane Mounjim100% (2)
- ISBN: 1-61481-056-8 Pages: 67: ANSI/AGMA 6025-D98Document1 pageISBN: 1-61481-056-8 Pages: 67: ANSI/AGMA 6025-D98gioNo ratings yet
- Zip Tie Domes - 3V 3/8 Assembly Manual: Instructions For Assembling The 25 Foot 3V 3/8 Frequency Geodesic DomeDocument33 pagesZip Tie Domes - 3V 3/8 Assembly Manual: Instructions For Assembling The 25 Foot 3V 3/8 Frequency Geodesic DomemarinerNo ratings yet
- Owner'S Service Manual: LIT-11626-35-29 B4X-2819U-10Document278 pagesOwner'S Service Manual: LIT-11626-35-29 B4X-2819U-10Amin SobirinNo ratings yet
- Overhead Crane Inspeksi BerkalaDocument4 pagesOverhead Crane Inspeksi BerkalaWerman Septian100% (1)
- 4-6. Instrument Thread & Weld Fittings (2023)Document12 pages4-6. Instrument Thread & Weld Fittings (2023)Soft IcecreamNo ratings yet
- DRG ListDocument272 pagesDRG ListVijay PalNo ratings yet
- SIP 2019 FinalDocument20 pagesSIP 2019 FinalAlexa Febiejoy SespeneNo ratings yet
- Vp-15-109-001-A01-P-237-004abc-D-006 Data Sheet For Steam TurbineDocument4 pagesVp-15-109-001-A01-P-237-004abc-D-006 Data Sheet For Steam TurbineRicardo NapitupuluNo ratings yet
- Cebu Car Rental - Rent A Car in Cebu - Newest Cars at Lowest Rates.Document20 pagesCebu Car Rental - Rent A Car in Cebu - Newest Cars at Lowest Rates.cebucar rentalNo ratings yet
- Hisn A' Shumookh Royal Court AffairsDocument2 pagesHisn A' Shumookh Royal Court AffairsSiva NandhamNo ratings yet
- Sole Diesel Despiece - M17!26!29Document71 pagesSole Diesel Despiece - M17!26!29hackisblackNo ratings yet
- Folder Fiamm Neptune 2010 EngDocument4 pagesFolder Fiamm Neptune 2010 EngchokribNo ratings yet
- Sel1.5b eDocument27 pagesSel1.5b eaaditsivaprakashNo ratings yet
- Pp83036by - 1106a-70tgDocument172 pagesPp83036by - 1106a-70tgJORGE JOSSUE OLIVARES PARDO100% (1)
- 0 PRO Mira440 Mira440 SF ENDocument8 pages0 PRO Mira440 Mira440 SF ENlyxuandatbkNo ratings yet
- KSB RioRioZDocument32 pagesKSB RioRioZSrdjanNo ratings yet
- Dental ChairDocument12 pagesDental Chairallan espinoNo ratings yet
- CSG TBG Dimensions PDFDocument3 pagesCSG TBG Dimensions PDFElisa Maria Angulo VanegasNo ratings yet