Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5835)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- (PDF) Production and Operations Analysis, Seventh Edition Epub PopularDocument1 page(PDF) Production and Operations Analysis, Seventh Edition Epub PopularAgung Nugraha0% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 144 SQRRDocument19 pages144 SQRRcaptainamerica201390% (20)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Nakshatra Nadi Astrology - AstrogurukulDocument8 pagesNakshatra Nadi Astrology - AstrogurukulRakesh Soni60% (5)
- Direct Indirect SpeachDocument13 pagesDirect Indirect SpeachMalik Naseer AwanNo ratings yet
- Newsletter May 2022 Vol 3 Issue 3.0Document24 pagesNewsletter May 2022 Vol 3 Issue 3.0Google UserNo ratings yet
- Remotesensing 14 03908Document17 pagesRemotesensing 14 03908Tekletsadik TeketelNo ratings yet
- SCILOGEX SCI-L330-Pro ManualDocument14 pagesSCILOGEX SCI-L330-Pro ManualCaique Serapião de SalesNo ratings yet
- +++facione (1998) Critical Thinking What It Is and Why It CountsDocument16 pages+++facione (1998) Critical Thinking What It Is and Why It CountsSandraNo ratings yet
- Babylonjs GameDocument112 pagesBabylonjs GameGeorge DeacNo ratings yet
- Transmission Line ProtectionDocument31 pagesTransmission Line ProtectionJai Gupta100% (1)
- Phoenix MecanoDocument11 pagesPhoenix MecanoTiago LalierNo ratings yet
- Reservoir Fluids Day 4Document57 pagesReservoir Fluids Day 4Bella cedricNo ratings yet
- Acsr SPLN 41-7 PDFDocument2 pagesAcsr SPLN 41-7 PDFAde Y Saputra100% (1)
- 09ns2 InstallDocument9 pages09ns2 InstallTanvi SharmaNo ratings yet
- CHN 2 Lec - Week 12 Documentation and ReportingDocument12 pagesCHN 2 Lec - Week 12 Documentation and Reportingyuuki konnoNo ratings yet
- Checklist For Diamond DA62: Comments Explaining Edition # 1.2Document18 pagesChecklist For Diamond DA62: Comments Explaining Edition # 1.2DJ Douglas100% (1)
- Urban Planning and UDGLDocument18 pagesUrban Planning and UDGLHandini PradhitasariNo ratings yet
- Surveying For Beginners by J. B. Davis (1909) PDFDocument202 pagesSurveying For Beginners by J. B. Davis (1909) PDFSandy Star BrandaNo ratings yet
- FilterDocument2 pagesFilterNguyen PhatNo ratings yet
- The English Paragraph: What Is A Paragraph?Document6 pagesThe English Paragraph: What Is A Paragraph?Khin Maung HtweNo ratings yet
- Learning and Teaching Styles in Engineering EducationDocument11 pagesLearning and Teaching Styles in Engineering EducationAndy Delos ReyesNo ratings yet
- SWA1 IME52 FinalDocument7 pagesSWA1 IME52 FinalKonstantina GeorgakakiNo ratings yet
- DSSD 605-Revised 2019Document9 pagesDSSD 605-Revised 2019Garfield R. PerezNo ratings yet
- VbhoveniDocument90 pagesVbhoveniPrashant SharmaNo ratings yet
- Proposed Disbursement ProcessDocument4 pagesProposed Disbursement ProcessmarvinceledioNo ratings yet
- 4 - AltimeterDocument41 pages4 - AltimeterOmarNo ratings yet
- Additive Manufacturing StandartsDocument28 pagesAdditive Manufacturing StandartssefaydesNo ratings yet
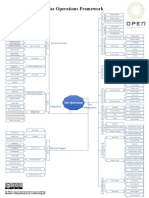
- OCP Framework - Mindmap.2019v1.4Document1 pageOCP Framework - Mindmap.2019v1.4LCNo ratings yet
- Capacitors: Expulsion Fuse Installation InstructionsDocument6 pagesCapacitors: Expulsion Fuse Installation InstructionscrcruzpNo ratings yet
- Exalco Albio 102 Curtain Wall SystemsDocument92 pagesExalco Albio 102 Curtain Wall SystemsAdmir MatoshiNo ratings yet