Download as docx, pdf, or txt
You might also like
- Survival Models Solution Chapter 2Document27 pagesSurvival Models Solution Chapter 2Nayaz Maudarbucus100% (8)
- RespuestasDocument18 pagesRespuestasAndres HerediaNo ratings yet
- Zero and First Order HoldDocument6 pagesZero and First Order Holdnirmal_inboxNo ratings yet
- Fourier Series-2 PDFDocument7 pagesFourier Series-2 PDFsightlesswarriorNo ratings yet
- Comsats University Islamabad: Signals & SystemsDocument10 pagesComsats University Islamabad: Signals & SystemsFarid MalikNo ratings yet
- 7.6.3.2 Spatially-Consistent UT Mobility Modelling: Table 7.6.3.1-2 Correlation Distance For Spatial ConsistencyDocument2 pages7.6.3.2 Spatially-Consistent UT Mobility Modelling: Table 7.6.3.1-2 Correlation Distance For Spatial Consistencypearl301010No ratings yet
- Labmanual SignalDocument51 pagesLabmanual SignalMuhammad Usama Sharaf SAAFINo ratings yet
- Chapter 2.2 Response Ist Order SystemsDocument30 pagesChapter 2.2 Response Ist Order SystemsSyed AliNo ratings yet
- Class Test - 2016: Electrical EngineeringDocument9 pagesClass Test - 2016: Electrical EngineeringarunNo ratings yet
- Class Test - 2016: Electrical EngineeringDocument11 pagesClass Test - 2016: Electrical EngineeringarunNo ratings yet
- Moments 271015Document2 pagesMoments 271015Anonymous 0Sqoi61No ratings yet
- Sampling TheoremDocument34 pagesSampling Theoremgaurav_juneja_4No ratings yet
- Transistors Power PresentationDocument65 pagesTransistors Power Presentationkcrawford1845No ratings yet
- Ex 2Document2 pagesEx 2TameNo ratings yet
- 9_lagrange_Interpolation (2)Document18 pages9_lagrange_Interpolation (2)shikaridwaipayan97No ratings yet
- Feedback Control Loop: Target yDocument37 pagesFeedback Control Loop: Target yozcagNo ratings yet
- Stabilization of Multimachine Power Systems by Decentralized Feedback ControlDocument27 pagesStabilization of Multimachine Power Systems by Decentralized Feedback ControlgbkumbharNo ratings yet
- Solutions Manual To Accompany Arbitrage Theory in Continuous Time 2nd Edition 9780199271269Document38 pagesSolutions Manual To Accompany Arbitrage Theory in Continuous Time 2nd Edition 9780199271269egglertitularxidp100% (15)
- Lab Task10 - PrintDocument7 pagesLab Task10 - Printtayyaba ayazNo ratings yet
- Peretmuan 12 Laplace in CircuitsDocument56 pagesPeretmuan 12 Laplace in CircuitsSando CrisiasaNo ratings yet
- Calculations Estimation Parameter: Block Diagram of A Self Tuning RegulatorDocument10 pagesCalculations Estimation Parameter: Block Diagram of A Self Tuning Regulatorvk2you009No ratings yet
- Experiment:6: % Initial Temperature at T 0 % Temperature After T 20 Minutes % Room/ Ambient TemperatureDocument5 pagesExperiment:6: % Initial Temperature at T 0 % Temperature After T 20 Minutes % Room/ Ambient TemperatureSad BoyNo ratings yet
- TurtleDocument8 pagesTurtleapi-512738790No ratings yet
- SM CHDocument75 pagesSM CHJonathanNo ratings yet
- Primer Ejercicio (Matematica 3) - CompressedDocument3 pagesPrimer Ejercicio (Matematica 3) - CompressedMirko Pehovaz berrospiNo ratings yet
- Table ComplexDocument5 pagesTable ComplexRavinder RangaNo ratings yet
- EE 102 Cabric Final Spring08 o Id15Document10 pagesEE 102 Cabric Final Spring08 o Id15Anonymous TbHpFLKNo ratings yet
- Lab. 08 Ingenieria de Control: Analisis en El Dominio de La Frecuencia I. Diagrama de Bode 1. IntroduccionDocument8 pagesLab. 08 Ingenieria de Control: Analisis en El Dominio de La Frecuencia I. Diagrama de Bode 1. IntroduccionJuan Carlos S QNo ratings yet
- FourrierDocument2 pagesFourrierkingodsNo ratings yet
- ECE 414 Tutorial 1: Review: Random Process Fourier Transform OuetasoDocument16 pagesECE 414 Tutorial 1: Review: Random Process Fourier Transform OuetasosaiknaramNo ratings yet
- Nama: Moh Shohibul Wafa NRP: 213210388: JawabanDocument7 pagesNama: Moh Shohibul Wafa NRP: 213210388: JawabanWafa AhmadNo ratings yet
- JOANADocument9 pagesJOANACervantes López NahomiNo ratings yet
- Lab Report 3Document7 pagesLab Report 3MUHAMMAD BILAL DAWAR MUHAMMAD BILAL DAWARNo ratings yet
- SimulationDocument13 pagesSimulationAnivesh JainNo ratings yet
- Assignment 5b Solutions 20 PDFDocument14 pagesAssignment 5b Solutions 20 PDFvbweuhvbwNo ratings yet
- Calculation of Receiver Sensitivity: T V V K T ° Where T V Calibrates Voltage As TemperatureDocument23 pagesCalculation of Receiver Sensitivity: T V V K T ° Where T V Calibrates Voltage As TemperaturevarunmrNo ratings yet
- 365 Spectrum AnalysisDocument19 pages365 Spectrum AnalysisSunilkumar ReddyNo ratings yet
- The Circuit in Fig. (A) Is Equivalent To The One Shown in Fig. (B)Document15 pagesThe Circuit in Fig. (A) Is Equivalent To The One Shown in Fig. (B)Ameer ShNo ratings yet
- Depi 9Document7 pagesDepi 9AndreiSanduNo ratings yet
- Integrantes: Q Q Q Lcos (Q) LDocument4 pagesIntegrantes: Q Q Q Lcos (Q) LJhonny GranadaNo ratings yet
- HW2sol PDFDocument4 pagesHW2sol PDFjulianli0220No ratings yet
- Band Pass Systems, Phasors and Complex Representation of SystemsDocument23 pagesBand Pass Systems, Phasors and Complex Representation of Systemsamitranjan_77No ratings yet
- Homework 8 SolutionsDocument9 pagesHomework 8 SolutionsaniNo ratings yet
- Calculo VectorialDocument16 pagesCalculo VectorialCristian HuamaníNo ratings yet
- Some Basic CTFT Pairs: k=−∞ k jkω0t k=−∞ k k k jω0t kDocument2 pagesSome Basic CTFT Pairs: k=−∞ k jkω0t k=−∞ k k k jω0t kdebaditya_hit326634No ratings yet
- Signals and Networks Assignment 2Document6 pagesSignals and Networks Assignment 2Avikalp SrivastavaNo ratings yet
- 6 04 Interpolasi Spline SJKDocument25 pages6 04 Interpolasi Spline SJKziNo ratings yet
- 1091 Circuit Theory HW2 Solution: Magnitude A JB A B B Phase A JB Add Ifa B Subtract Ifa B ADocument6 pages1091 Circuit Theory HW2 Solution: Magnitude A JB A B B Phase A JB Add Ifa B Subtract Ifa B A曾燒餅No ratings yet
- Xperiment O: in Lab ExerciseDocument13 pagesXperiment O: in Lab Exerciseshubham20061204No ratings yet
- Ee602 Fourier SeriesDocument110 pagesEe602 Fourier SeriesSyaa MalyqaNo ratings yet
- Exercises For Signals and Systems (Part Three)Document6 pagesExercises For Signals and Systems (Part Three)Vincent YuchiNo ratings yet
- EL-4701 Modelos de Sistemas: FormularioDocument9 pagesEL-4701 Modelos de Sistemas: FormularioEmmanuel AcostaNo ratings yet
- Partial AnswersDocument19 pagesPartial AnswersRana DasNo ratings yet
- Lab Title: Objectives: Material Required:: Sinusoidal Steady StateDocument11 pagesLab Title: Objectives: Material Required:: Sinusoidal Steady Stateahmed shahNo ratings yet
- Ministry of Science and Technology Department of Technical and Vocational EducationDocument17 pagesMinistry of Science and Technology Department of Technical and Vocational Educationdeepshikhasharma230191No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- MIP Lab Semester Project - Section EDocument5 pagesMIP Lab Semester Project - Section EAbdurrahman KhanNo ratings yet
- CA2 Project SPR 14 Writeup 7863Document3 pagesCA2 Project SPR 14 Writeup 7863Abdurrahman KhanNo ratings yet
- CA2 Project SPR 14 Writeup 7940Document4 pagesCA2 Project SPR 14 Writeup 7940Abdurrahman KhanNo ratings yet
- Balanced GeneratorDocument6 pagesBalanced GeneratorAbdurrahman KhanNo ratings yet
- CA2 Project SPR 14 Writeup 7799Document5 pagesCA2 Project SPR 14 Writeup 7799Abdurrahman KhanNo ratings yet
- Radio Over Fiber (Rof) Refers To A Technology Whereby Light Is Modulated by A Radio Signal andDocument1 pageRadio Over Fiber (Rof) Refers To A Technology Whereby Light Is Modulated by A Radio Signal andAbdurrahman KhanNo ratings yet
- PRP - SPR - 15 - Mid-1 - SolDocument6 pagesPRP - SPR - 15 - Mid-1 - SolAbdurrahman KhanNo ratings yet
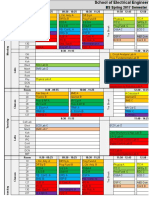
- BS Spring 2017 Semester: FB. Cont. A Ems A FB. Cont. B Ems BDocument6 pagesBS Spring 2017 Semester: FB. Cont. A Ems A FB. Cont. B Ems BAbdurrahman KhanNo ratings yet
- National University: Course Outlines of BS Electrical Engineering Degree ProgramDocument1 pageNational University: Course Outlines of BS Electrical Engineering Degree ProgramAbdurrahman KhanNo ratings yet
- National University: Course Outlines of BS Electrical Engineering Degree ProgramDocument2 pagesNational University: Course Outlines of BS Electrical Engineering Degree ProgramAbdurrahman KhanNo ratings yet
- Probability AssignmentDocument4 pagesProbability AssignmentAbdurrahman KhanNo ratings yet
- Assignment # 4 Programming For Engineers II: Implementing A Dictionary Method For Text File CompressionDocument2 pagesAssignment # 4 Programming For Engineers II: Implementing A Dictionary Method For Text File CompressionAbdurrahman KhanNo ratings yet
- DS Spring2015 Assignment 04Document1 pageDS Spring2015 Assignment 04Abdurrahman KhanNo ratings yet