Download as ppt, pdf, or txt
You might also like
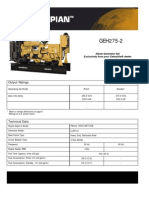
- GEH275Document4 pagesGEH275foroNo ratings yet
- Caterpillar C11 Engine SpecsDocument4 pagesCaterpillar C11 Engine Specsjinxy5779100% (1)
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDocument9 pagesExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaNo ratings yet
- Dynamometer: Theory and Application to Engine TestingFrom EverandDynamometer: Theory and Application to Engine TestingNo ratings yet
- Training VibrasiDocument91 pagesTraining VibrasiArfahHamzah100% (5)
- Kollmorgen - Nema 23 T - SpecsheetDocument4 pagesKollmorgen - Nema 23 T - SpecsheetElectromateNo ratings yet
- ABB - ACS800 Learning Guide - Drive Dimensioning For CranesDocument65 pagesABB - ACS800 Learning Guide - Drive Dimensioning For CranesflasnicugNo ratings yet
- Motor Data Sheet 1A 1#360kW, 4pole, 6600VDocument3 pagesMotor Data Sheet 1A 1#360kW, 4pole, 6600Vasyyas100% (1)
- Motor Calculations PDFDocument8 pagesMotor Calculations PDFheroNo ratings yet
- Datasheet For MotorDocument1 pageDatasheet For Motorsal_ssabriNo ratings yet
- Power System Analyses : Dynamic ModelingDocument47 pagesPower System Analyses : Dynamic Modelingkultardeep100% (1)
- Hybrid Servo-Driven IMMsDocument32 pagesHybrid Servo-Driven IMMsFalecyaRedinaNo ratings yet
- Coreless Motor 720Document15 pagesCoreless Motor 720anikmandal106No ratings yet
- Motor Engineering FormulasDocument1 pageMotor Engineering FormulasDede SadiNo ratings yet
- Motor Calculations#numericalcalculation PDFDocument6 pagesMotor Calculations#numericalcalculation PDFCris VillarNo ratings yet
- 390 MotorDocument14 pages390 MotorAlex MoiseNo ratings yet
- MotorsDocument50 pagesMotorsdinesh kumarNo ratings yet
- Groupwork #5 (Ee108l-A37)Document6 pagesGroupwork #5 (Ee108l-A37)Mark ValduezaNo ratings yet
- Launchpoint Halbach Motor Data Sheet r1Document3 pagesLaunchpoint Halbach Motor Data Sheet r1akib110No ratings yet
- DC Motor CalculationsDocument10 pagesDC Motor Calculationsoctav12No ratings yet
- 022 Gep150 Lehf1193 11Document4 pages022 Gep150 Lehf1193 11Yaseen SagarNo ratings yet
- 50 - 20T X 29.5m DG Crane - R3Document13 pages50 - 20T X 29.5m DG Crane - R3Rv VaghasiaNo ratings yet
- 1.7" X 1.5" (43mm X 38mm) Series: Instrument Grade Brushless DC Servo MotorsDocument3 pages1.7" X 1.5" (43mm X 38mm) Series: Instrument Grade Brushless DC Servo MotorsSagar JoshiNo ratings yet
- 120240e-Stdy of DC MotorsDocument18 pages120240e-Stdy of DC MotorsVidura SucharithaNo ratings yet
- Max 17 17 MM, Graphite Brushes, 4.5 Watt: Part NumbersDocument1 pageMax 17 17 MM, Graphite Brushes, 4.5 Watt: Part NumbersWelington Wagner De Oliveira JuniorNo ratings yet
- DC Motor Calculations - Calculating Torque - MICROMODocument8 pagesDC Motor Calculations - Calculating Torque - MICROMOaniruthNo ratings yet
- Electric Vehicle V1.7 PublicDocument32 pagesElectric Vehicle V1.7 PublicDhaval SalgaonkarNo ratings yet
- 11 en 158Document1 page11 en 158sergioteleco5317No ratings yet
- Caterpillar Olympian GEH 220-2 - Technical SheetDocument4 pagesCaterpillar Olympian GEH 220-2 - Technical Sheetbobi15667% (6)
- EC 45 Flat Motor Æ45 MM, Brushless, 50 Watt: Order NumberDocument1 pageEC 45 Flat Motor Æ45 MM, Brushless, 50 Watt: Order NumbervicodgNo ratings yet
- Electric Flight: The Power System BasicsDocument15 pagesElectric Flight: The Power System BasicsNaveen Kumar100% (1)
- 42 HSXDocument2 pages42 HSXJoão MiguelNo ratings yet
- PG1000B (GB)Document4 pagesPG1000B (GB)mohsen_wwwNo ratings yet
- What Is A DriveDocument16 pagesWhat Is A DriveSachin PandeyNo ratings yet
- MoappDocument5 pagesMoappluanleNo ratings yet
- Pittman GM9236S027Document0 pagesPittman GM9236S027Nicola's SacNo ratings yet
- Emd 34Document14 pagesEmd 34Rusyaidi UmarNo ratings yet
- Actuators-Unit 1 & Sensor Unit 2Document123 pagesActuators-Unit 1 & Sensor Unit 2viren mallyaNo ratings yet
- EGB111 Week 8 Studio SlidesDocument23 pagesEGB111 Week 8 Studio SlidesWinston BoonNo ratings yet
- SmartStepMotors DatasheetDocument8 pagesSmartStepMotors DatasheetZuhal AkbayırNo ratings yet
- P700 1 (4PP) GB (0213) PDFDocument4 pagesP700 1 (4PP) GB (0213) PDFShahzad AliNo ratings yet
- DC Motor Model and ControlDocument16 pagesDC Motor Model and ControlmrsploogeNo ratings yet
- 775 MotorDocument5 pages775 MotorGowtham pandiyanNo ratings yet
- Guide To The MEP Series GeneratorsDocument31 pagesGuide To The MEP Series Generatorsmilhouse68100% (5)
- TorqueDocument11 pagesTorqueIndushekhar KumarNo ratings yet
- 8224 Brush DC Servo MotorDocument1 page8224 Brush DC Servo MotorMuhammad SaadNo ratings yet
- Product Information: Model 1050E-500 Top DriveDocument6 pagesProduct Information: Model 1050E-500 Top Drivezanella88100% (1)
- 12V4000G23 Water Charge Air Cooling (External) 50 HZ - 1.500/min Fuel Consumption OptimizedDocument2 pages12V4000G23 Water Charge Air Cooling (External) 50 HZ - 1.500/min Fuel Consumption OptimizednooshinnasrinNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Analog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignFrom EverandAnalog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignNo ratings yet
- Model Predictive Control of High Power Converters and Industrial DrivesFrom EverandModel Predictive Control of High Power Converters and Industrial DrivesNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Worked Examples in Electrical Machines and Drives: Applied Electricity and ElectronicsFrom EverandWorked Examples in Electrical Machines and Drives: Applied Electricity and ElectronicsRating: 3 out of 5 stars3/5 (5)