Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ImagineFX Presents - How To Draw and Paint Anatomy (2010) (gnv64) PDFDocument117 pagesImagineFX Presents - How To Draw and Paint Anatomy (2010) (gnv64) PDFzdeniel2006100% (5)
- Momentum Space OperatorDocument12 pagesMomentum Space OperatorSri Vanaja S100% (1)
- TB Chapter7 PDFDocument24 pagesTB Chapter7 PDFAsmaa AhmedNo ratings yet
- Camioane Ac CantitatiDocument3 pagesCamioane Ac Cantitatizdeniel2006No ratings yet
- Fendt 939 Operare EnglezaDocument326 pagesFendt 939 Operare Englezazdeniel2006No ratings yet
- Catalog WurthDocument3,535 pagesCatalog Wurthzdeniel2006No ratings yet
- Fabrication SDocument39 pagesFabrication Szdeniel2006No ratings yet
- Measuring ToolsDocument5 pagesMeasuring ToolsJhuneMarie BucadNo ratings yet
- Reading 1Document20 pagesReading 1Hwee Peng YeoNo ratings yet
- SPM Definition ListDocument3 pagesSPM Definition ListWong Weng SiongNo ratings yet
- Shear Hinge MechanismDocument12 pagesShear Hinge MechanismManjula Unnikrishnan N KNo ratings yet
- CH 18Document40 pagesCH 18Catherine Nur KomaraNo ratings yet
- Solution MethodsDocument28 pagesSolution MethodsAhmad HisyamNo ratings yet
- Practice 23 PDFDocument9 pagesPractice 23 PDFRayyan Salman100% (1)
- 01 TestbankDocument19 pages01 TestbankEdward YangNo ratings yet
- Daikin VRV IV-i Installation and Operation Manual EngDocument44 pagesDaikin VRV IV-i Installation and Operation Manual EngRayhan SayeedNo ratings yet
- O.A.I. Chemistry Midterm Exam All PartsDocument30 pagesO.A.I. Chemistry Midterm Exam All Partstomiwa iluromiNo ratings yet
- Unitops - ch3 ProblemsDocument4 pagesUnitops - ch3 ProblemsAngelo de AsisNo ratings yet
- 2011 Complete Journals Catalog (Incl Open Access Journals)Document292 pages2011 Complete Journals Catalog (Incl Open Access Journals)mourighoshNo ratings yet
- 7 Stress Transformations Gerilme Donusumleri 23022021Document50 pages7 Stress Transformations Gerilme Donusumleri 23022021Muhammet AkifNo ratings yet
- L22 - PN Homojunction - 5 PDFDocument16 pagesL22 - PN Homojunction - 5 PDFPoddutoori Sankeerth ReddyNo ratings yet
- Components of Nuclear ReactorDocument17 pagesComponents of Nuclear ReactormrinalNo ratings yet
- Traffic Engineering: University of Duhok College of Engineering Civil Department Fourth Year Students 2020-2021Document11 pagesTraffic Engineering: University of Duhok College of Engineering Civil Department Fourth Year Students 2020-2021Ahmad SalihNo ratings yet
- Tuto 1 DynamicsDocument18 pagesTuto 1 DynamicsSiti ZabriNo ratings yet
- DLL October. 3-7, 2022Document6 pagesDLL October. 3-7, 2022ANTOLYN DE DIOSNo ratings yet
- Interactive Textbook1 2 Pproperties of MatterDocument7 pagesInteractive Textbook1 2 Pproperties of Matterapi-240094705No ratings yet
- SupercapacitorDocument48 pagesSupercapacitorBalamurugan RamalingamNo ratings yet
- Induction CookingDocument9 pagesInduction Cookingtechzones100% (1)
- 13 C NMR InterpretationDocument9 pages13 C NMR InterpretationDavid ScoNo ratings yet
- Pioro 2005Document25 pagesPioro 2005Thamil ThedalNo ratings yet
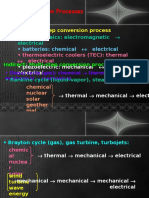
- Energy Conversion ProcessesDocument15 pagesEnergy Conversion Processesimamsakroni048No ratings yet
- Tabla9 1Document1 pageTabla9 1everquinNo ratings yet
- Cooling Tower Mto-2017Document28 pagesCooling Tower Mto-2017Priyank kanjariyaNo ratings yet
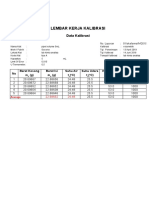
- Muhammad Fadli AKA18018 Kalibrasi PipetDocument9 pagesMuhammad Fadli AKA18018 Kalibrasi Pipetfadli muhammadNo ratings yet
- 2324 Level M (Gr11 UAE-Gulf) Mechanics Course Questions With BQDocument59 pages2324 Level M (Gr11 UAE-Gulf) Mechanics Course Questions With BQyoussefnabil1969No ratings yet