
Beam
Beam
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Gas Cutting Pressure Tip Chart PDFDocument2 pagesGas Cutting Pressure Tip Chart PDFChozha RajanNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Prelim Exam - Attempt ReviewDocument13 pagesPrelim Exam - Attempt ReviewErick GarciaNo ratings yet
- Introduction Ship Design EngineeringDocument69 pagesIntroduction Ship Design EngineeringUNsha bee komNo ratings yet
- NavyDocument74 pagesNavyUNsha bee komNo ratings yet
- Design of A 4-SeatDocument46 pagesDesign of A 4-SeatUNsha bee komNo ratings yet
- Aero 7sem Ae2404lmDocument35 pagesAero 7sem Ae2404lmUNsha bee komNo ratings yet
- Aircraft Parametric 3dDocument131 pagesAircraft Parametric 3dUNsha bee komNo ratings yet
- Aircraft Design Project-1 of Fighter byDocument82 pagesAircraft Design Project-1 of Fighter byUNsha bee komNo ratings yet
- FULLTEXT01Document117 pagesFULLTEXT01UNsha bee komNo ratings yet
- Kaplan Turbine Hill Dig Thesis PDFDocument210 pagesKaplan Turbine Hill Dig Thesis PDFUNsha bee kom100% (2)
- 63 B 3Document4 pages63 B 3UNsha bee komNo ratings yet
- Wind Energy FULLTEXT01Document99 pagesWind Energy FULLTEXT01UNsha bee komNo ratings yet
- Finite Element Analysis: Analyzing Pressure Vessels Using Fea in CatiaDocument6 pagesFinite Element Analysis: Analyzing Pressure Vessels Using Fea in CatiaUNsha bee komNo ratings yet
- Darrin Willis Masters Thesis Corrected FinalDocument167 pagesDarrin Willis Masters Thesis Corrected FinalUNsha bee komNo ratings yet
- Impact Assessment Case Studies From Southern Africa: SaieaDocument14 pagesImpact Assessment Case Studies From Southern Africa: SaieaUNsha bee komNo ratings yet
- Chapter 8 Two-Dimensional Problem SolutionDocument51 pagesChapter 8 Two-Dimensional Problem SolutionUNsha bee kom100% (1)
- R&D Planning and Governance: Ronald P. Evens and Joel CovinskyDocument34 pagesR&D Planning and Governance: Ronald P. Evens and Joel CovinskyUNsha bee komNo ratings yet
- Cycloidal TrajectorysimulinkDocument8 pagesCycloidal TrajectorysimulinkUNsha bee komNo ratings yet
- Aircraft Equations of Motion - 2Document26 pagesAircraft Equations of Motion - 2UNsha bee komNo ratings yet
- The International University (Iu) - Vietnam National University - HCMCDocument4 pagesThe International University (Iu) - Vietnam National University - HCMCDiệu Vi NguyễnNo ratings yet
- Turbulence: MIE1207 September, 2012Document128 pagesTurbulence: MIE1207 September, 2012Sepehr SaNo ratings yet
- Maxtrix Algebra For EngineersDocument187 pagesMaxtrix Algebra For Engineersanon_999497818No ratings yet
- Chapter 1-2 Matrix AlgebraDocument42 pagesChapter 1-2 Matrix AlgebraAhmad FaidhiNo ratings yet
- Solving Problems in Mathematical Analysis 1Document12 pagesSolving Problems in Mathematical Analysis 1Eulises ValenzuelaNo ratings yet
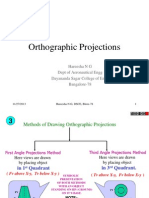
- Orthographic Projections: Hareesha N G Dept of Aeronautical Engg Dayananda Sagar College of Engg Bangalore-78Document38 pagesOrthographic Projections: Hareesha N G Dept of Aeronautical Engg Dayananda Sagar College of Engg Bangalore-78Hareesha N GNo ratings yet
- Trigonometric Identities and Equations, Mixed Exercise 10Document6 pagesTrigonometric Identities and Equations, Mixed Exercise 10Mo RonoNo ratings yet
- Indeterminate FormsDocument6 pagesIndeterminate FormsGabriel Dave AlamoNo ratings yet
- Series: Lesson 2Document11 pagesSeries: Lesson 2Jester BorresNo ratings yet
- Output Only Modal AnalysisDocument64 pagesOutput Only Modal AnalysisIgor GjorgjievNo ratings yet
- LPP by Simplex Method-1Document7 pagesLPP by Simplex Method-1Parth MuniNo ratings yet
- Newton SystemDocument17 pagesNewton SystemKtk ZadNo ratings yet
- STorrellas EM InSync G6 M3 L14 LPSDocument7 pagesSTorrellas EM InSync G6 M3 L14 LPSSummer TorrellasNo ratings yet
- State-Of-The-Art of Vibration Analysis of Small-Sized Structures by Using Nonclassical Continuum Theories of ElasticityDocument189 pagesState-Of-The-Art of Vibration Analysis of Small-Sized Structures by Using Nonclassical Continuum Theories of Elasticityazerty wxcvbNo ratings yet
- Exp 2 - I and II Order ProcessDocument4 pagesExp 2 - I and II Order ProcessErmias NigussieNo ratings yet
- MA/MSCMT-01 M.A./M.Sc. (Previous) Mathematics Examination Advanced Algebra Paper - MA/MSCMT-01Document3 pagesMA/MSCMT-01 M.A./M.Sc. (Previous) Mathematics Examination Advanced Algebra Paper - MA/MSCMT-01pradyum choudharyNo ratings yet
- MA1513 Tutorial 1 T03Document93 pagesMA1513 Tutorial 1 T03MelodyNo ratings yet
- E CAPS-14 - Class XI (SS) - Mathematics - FinalDocument4 pagesE CAPS-14 - Class XI (SS) - Mathematics - FinalKrishnendu SahaNo ratings yet
- R 0 R 1 1 R 1 RDocument21 pagesR 0 R 1 1 R 1 RGaston GBNo ratings yet
- Session 7-9.ppt-20230308122502Document54 pagesSession 7-9.ppt-20230308122502Danang IndrajayaNo ratings yet
- Pub - Particles Sources and Fields PDFDocument444 pagesPub - Particles Sources and Fields PDFEdilson JuniorNo ratings yet
- Stiffness MatrixDocument22 pagesStiffness MatrixArun Sunny100% (1)
- Differential Calculus - PART 3 - Maxima-Minima-TimeratesDocument2 pagesDifferential Calculus - PART 3 - Maxima-Minima-TimeratesMar Lou Galinato100% (3)
- MA3151 Matrices and Calculus Question Bank 2Document5 pagesMA3151 Matrices and Calculus Question Bank 2VIGNESH VASUNo ratings yet
- Task Performance QuantitativeDocument7 pagesTask Performance QuantitativegolddjrmeepNo ratings yet
- National University OF Modern Languages: ProjectDocument5 pagesNational University OF Modern Languages: ProjectAyesha AkramNo ratings yet
- Addmaths Assignment 2Document12 pagesAddmaths Assignment 2Nasya GohNo ratings yet
- Analog Communication (Ec-405) Unit-1Document57 pagesAnalog Communication (Ec-405) Unit-1Kritika SoniNo ratings yet
- Perimeter of An Ellipse Perimeter of An EllipseDocument4 pagesPerimeter of An Ellipse Perimeter of An EllipseLucianoNo ratings yet






















































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Gas Cutting Pressure Tip Chart PDFDocument2 pagesGas Cutting Pressure Tip Chart PDFChozha RajanNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Prelim Exam - Attempt ReviewDocument13 pagesPrelim Exam - Attempt ReviewErick GarciaNo ratings yet
- Introduction Ship Design EngineeringDocument69 pagesIntroduction Ship Design EngineeringUNsha bee komNo ratings yet
- NavyDocument74 pagesNavyUNsha bee komNo ratings yet
- Design of A 4-SeatDocument46 pagesDesign of A 4-SeatUNsha bee komNo ratings yet
- Aero 7sem Ae2404lmDocument35 pagesAero 7sem Ae2404lmUNsha bee komNo ratings yet
- Aircraft Parametric 3dDocument131 pagesAircraft Parametric 3dUNsha bee komNo ratings yet
- Aircraft Design Project-1 of Fighter byDocument82 pagesAircraft Design Project-1 of Fighter byUNsha bee komNo ratings yet
- FULLTEXT01Document117 pagesFULLTEXT01UNsha bee komNo ratings yet
- Kaplan Turbine Hill Dig Thesis PDFDocument210 pagesKaplan Turbine Hill Dig Thesis PDFUNsha bee kom100% (2)
- 63 B 3Document4 pages63 B 3UNsha bee komNo ratings yet
- Wind Energy FULLTEXT01Document99 pagesWind Energy FULLTEXT01UNsha bee komNo ratings yet
- Finite Element Analysis: Analyzing Pressure Vessels Using Fea in CatiaDocument6 pagesFinite Element Analysis: Analyzing Pressure Vessels Using Fea in CatiaUNsha bee komNo ratings yet
- Darrin Willis Masters Thesis Corrected FinalDocument167 pagesDarrin Willis Masters Thesis Corrected FinalUNsha bee komNo ratings yet
- Impact Assessment Case Studies From Southern Africa: SaieaDocument14 pagesImpact Assessment Case Studies From Southern Africa: SaieaUNsha bee komNo ratings yet
- Chapter 8 Two-Dimensional Problem SolutionDocument51 pagesChapter 8 Two-Dimensional Problem SolutionUNsha bee kom100% (1)
- R&D Planning and Governance: Ronald P. Evens and Joel CovinskyDocument34 pagesR&D Planning and Governance: Ronald P. Evens and Joel CovinskyUNsha bee komNo ratings yet
- Cycloidal TrajectorysimulinkDocument8 pagesCycloidal TrajectorysimulinkUNsha bee komNo ratings yet
- Aircraft Equations of Motion - 2Document26 pagesAircraft Equations of Motion - 2UNsha bee komNo ratings yet
- The International University (Iu) - Vietnam National University - HCMCDocument4 pagesThe International University (Iu) - Vietnam National University - HCMCDiệu Vi NguyễnNo ratings yet
- Turbulence: MIE1207 September, 2012Document128 pagesTurbulence: MIE1207 September, 2012Sepehr SaNo ratings yet
- Maxtrix Algebra For EngineersDocument187 pagesMaxtrix Algebra For Engineersanon_999497818No ratings yet
- Chapter 1-2 Matrix AlgebraDocument42 pagesChapter 1-2 Matrix AlgebraAhmad FaidhiNo ratings yet
- Solving Problems in Mathematical Analysis 1Document12 pagesSolving Problems in Mathematical Analysis 1Eulises ValenzuelaNo ratings yet
- Orthographic Projections: Hareesha N G Dept of Aeronautical Engg Dayananda Sagar College of Engg Bangalore-78Document38 pagesOrthographic Projections: Hareesha N G Dept of Aeronautical Engg Dayananda Sagar College of Engg Bangalore-78Hareesha N GNo ratings yet
- Trigonometric Identities and Equations, Mixed Exercise 10Document6 pagesTrigonometric Identities and Equations, Mixed Exercise 10Mo RonoNo ratings yet
- Indeterminate FormsDocument6 pagesIndeterminate FormsGabriel Dave AlamoNo ratings yet
- Series: Lesson 2Document11 pagesSeries: Lesson 2Jester BorresNo ratings yet
- Output Only Modal AnalysisDocument64 pagesOutput Only Modal AnalysisIgor GjorgjievNo ratings yet
- LPP by Simplex Method-1Document7 pagesLPP by Simplex Method-1Parth MuniNo ratings yet
- Newton SystemDocument17 pagesNewton SystemKtk ZadNo ratings yet
- STorrellas EM InSync G6 M3 L14 LPSDocument7 pagesSTorrellas EM InSync G6 M3 L14 LPSSummer TorrellasNo ratings yet
- State-Of-The-Art of Vibration Analysis of Small-Sized Structures by Using Nonclassical Continuum Theories of ElasticityDocument189 pagesState-Of-The-Art of Vibration Analysis of Small-Sized Structures by Using Nonclassical Continuum Theories of Elasticityazerty wxcvbNo ratings yet
- Exp 2 - I and II Order ProcessDocument4 pagesExp 2 - I and II Order ProcessErmias NigussieNo ratings yet
- MA/MSCMT-01 M.A./M.Sc. (Previous) Mathematics Examination Advanced Algebra Paper - MA/MSCMT-01Document3 pagesMA/MSCMT-01 M.A./M.Sc. (Previous) Mathematics Examination Advanced Algebra Paper - MA/MSCMT-01pradyum choudharyNo ratings yet
- MA1513 Tutorial 1 T03Document93 pagesMA1513 Tutorial 1 T03MelodyNo ratings yet
- E CAPS-14 - Class XI (SS) - Mathematics - FinalDocument4 pagesE CAPS-14 - Class XI (SS) - Mathematics - FinalKrishnendu SahaNo ratings yet
- R 0 R 1 1 R 1 RDocument21 pagesR 0 R 1 1 R 1 RGaston GBNo ratings yet
- Session 7-9.ppt-20230308122502Document54 pagesSession 7-9.ppt-20230308122502Danang IndrajayaNo ratings yet
- Pub - Particles Sources and Fields PDFDocument444 pagesPub - Particles Sources and Fields PDFEdilson JuniorNo ratings yet
- Stiffness MatrixDocument22 pagesStiffness MatrixArun Sunny100% (1)
- Differential Calculus - PART 3 - Maxima-Minima-TimeratesDocument2 pagesDifferential Calculus - PART 3 - Maxima-Minima-TimeratesMar Lou Galinato100% (3)
- MA3151 Matrices and Calculus Question Bank 2Document5 pagesMA3151 Matrices and Calculus Question Bank 2VIGNESH VASUNo ratings yet
- Task Performance QuantitativeDocument7 pagesTask Performance QuantitativegolddjrmeepNo ratings yet
- National University OF Modern Languages: ProjectDocument5 pagesNational University OF Modern Languages: ProjectAyesha AkramNo ratings yet
- Addmaths Assignment 2Document12 pagesAddmaths Assignment 2Nasya GohNo ratings yet
- Analog Communication (Ec-405) Unit-1Document57 pagesAnalog Communication (Ec-405) Unit-1Kritika SoniNo ratings yet
- Perimeter of An Ellipse Perimeter of An EllipseDocument4 pagesPerimeter of An Ellipse Perimeter of An EllipseLucianoNo ratings yet