Download as ppt, pdf, or txt
You might also like
- Implementation of A 16-Bit RISC Processor Using FPGA ProgrammingDocument25 pagesImplementation of A 16-Bit RISC Processor Using FPGA ProgrammingTejashree100% (3)
- Unit-5 PIC18 Architecture PDFDocument26 pagesUnit-5 PIC18 Architecture PDFMohammed AbdulAziz100% (1)
- Class 4 Pt2 WorksheetDocument2 pagesClass 4 Pt2 WorksheetNarendra Ritvik Pandry100% (3)
- Pic Microcontroller - Class NotesDocument26 pagesPic Microcontroller - Class NotesNarasimha Murthy Yayavaram80% (25)
- Advanced Database Management System (CSC-401) (Sample Question Paper)Document1 pageAdvanced Database Management System (CSC-401) (Sample Question Paper)Bibash AdhikariNo ratings yet
- AvaraDynaFlex OverviewDocument39 pagesAvaraDynaFlex Overviewannisa67% (3)
- Microcontroller Basics - PPSXDocument44 pagesMicrocontroller Basics - PPSXholaNo ratings yet
- 8-Bit Microcontroller With 4K Bytes In-System Programmable Flash AT90S4414 PreliminaryDocument10 pages8-Bit Microcontroller With 4K Bytes In-System Programmable Flash AT90S4414 PreliminaryYerson CrespoNo ratings yet
- Amc Unit-2Document133 pagesAmc Unit-2Sasi BhushanNo ratings yet
- 89 S 52Document8 pages89 S 52Ashok BalajiNo ratings yet
- Unit 5 NotesDocument34 pagesUnit 5 NotesNimmagadda Chandra PaulNo ratings yet
- Avr NotesDocument20 pagesAvr Noteschandrakant chaudhariNo ratings yet
- At Tiny 13Document146 pagesAt Tiny 13Hasri AwalNo ratings yet
- 2 Input Output PortsDocument29 pages2 Input Output PortsUmair AhmadhNo ratings yet
- ATMega8 UcDocument40 pagesATMega8 UcnrjchopraNo ratings yet
- Avr 2022Document17 pagesAvr 2022Soumya Ranjan PandaNo ratings yet
- Write The Features of PIC16F8XX Flash Microcontrollers?: Unit-ViDocument6 pagesWrite The Features of PIC16F8XX Flash Microcontrollers?: Unit-ViashokNo ratings yet
- Pic Micro ControllersDocument18 pagesPic Micro ControllersKrishna BoreddyNo ratings yet
- Avr Atmega 8 Uc: Lets Learn Fundamentals !!Document40 pagesAvr Atmega 8 Uc: Lets Learn Fundamentals !!malhiavtarsinghNo ratings yet
- AVR MicrocontrollerDocument16 pagesAVR MicrocontrollerNaveen PandeyNo ratings yet
- AVR Lecture 2Document72 pagesAVR Lecture 2Mahrukh Baloch100% (2)
- Microprocessor Lab Manual EE0310Document44 pagesMicroprocessor Lab Manual EE0310sathishkumar.vNo ratings yet
- 8-Bit Microcontroller With 2K Bytes of In-System Programmable Flash Attiny22 Attiny22L PreliminaryDocument11 pages8-Bit Microcontroller With 2K Bytes of In-System Programmable Flash Attiny22 Attiny22L Preliminarymike_helplineNo ratings yet
- MICROCONTROLLERDocument29 pagesMICROCONTROLLERhsbedi92No ratings yet
- Record - Embedded LabDocument93 pagesRecord - Embedded LabSatheesh KumarNo ratings yet
- Control Unit - 89C52: Introduction About Micro ControllerDocument20 pagesControl Unit - 89C52: Introduction About Micro ControllerSubhashini AruchamyNo ratings yet
- ECE 513 - PART1-Introduction To PIC16F84ADocument46 pagesECE 513 - PART1-Introduction To PIC16F84AMitch100% (1)
- EMISY Second Test Exemplary Questions Solved-3Document15 pagesEMISY Second Test Exemplary Questions Solved-3YANG LIUNo ratings yet
- EE6008 Notes RejinpaulDocument234 pagesEE6008 Notes RejinpaulB.S. Mothika sriNo ratings yet
- EXP NO 01 A Study On ARM Cortex M Series Controller Starter KitDocument8 pagesEXP NO 01 A Study On ARM Cortex M Series Controller Starter KitThangaraj KNo ratings yet
- Micro ControllersDocument9 pagesMicro Controllersmiriam.aliceNo ratings yet
- Unit 5 - Microprocessor & Its Application - WWW - Rgpvnotes.inDocument12 pagesUnit 5 - Microprocessor & Its Application - WWW - Rgpvnotes.inPrayag ParasharNo ratings yet
- Unit 2 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDocument9 pagesUnit 2 - Microcontroller & Embedded System - WWW - Rgpvnotes.inYash raiNo ratings yet
- Advanced Microcontroller and Embedded SystemsDocument64 pagesAdvanced Microcontroller and Embedded SystemsSakshi WaniNo ratings yet
- Electrical NotesDocument27 pagesElectrical NotesshubhamNo ratings yet
- Pic ReportDocument46 pagesPic ReportknlkohliNo ratings yet
- ES Assignment 3Document12 pagesES Assignment 3satinder singhNo ratings yet
- Microcontroller SeriesDocument14 pagesMicrocontroller SeriesmasindedaddyNo ratings yet
- 722.file Ref.811.1632Document38 pages722.file Ref.811.1632Razdrizal Rizki ErmahriNo ratings yet
- Unit - Viii The AVR RISC Microcontroller's ArchitectureDocument9 pagesUnit - Viii The AVR RISC Microcontroller's ArchitectureTechnoGateKhammamNo ratings yet
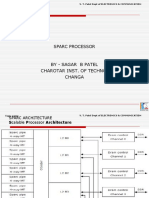
- Sparc Processor: by - Sagar B Patel Charotar Inst. of Techno. ChangaDocument24 pagesSparc Processor: by - Sagar B Patel Charotar Inst. of Techno. ChangaRavishah007No ratings yet
- AVR MicrocontrollersDocument38 pagesAVR Microcontrollerspaku deyNo ratings yet
- AVR Architecture and ApplicationDocument29 pagesAVR Architecture and Applicationhefawoj62No ratings yet
- MPMC Unit 2Document31 pagesMPMC Unit 2nikitaNo ratings yet
- AT89S52Document20 pagesAT89S52Bhargav GoudNo ratings yet
- Computer Orgn 230428 235533Document10 pagesComputer Orgn 230428 235533Arathi SuryaramananNo ratings yet
- Avr CoreDocument145 pagesAvr CoreStephanie FloresNo ratings yet
- Module3 ARMDocument96 pagesModule3 ARMshivasstvmNo ratings yet
- Study of Pic16F877A Microcontroller: Equipments RequiredDocument7 pagesStudy of Pic16F877A Microcontroller: Equipments RequiredPriyadharshini TNo ratings yet
- Microcontroller Interfacing EssentialsDocument75 pagesMicrocontroller Interfacing EssentialsBesho AtefNo ratings yet
- ARM Micro Controller Differences Between Microprocessor and MicrocontrollerDocument18 pagesARM Micro Controller Differences Between Microprocessor and Microcontrollersrc e-solutionsNo ratings yet
- City". We Implemented Using PIC Microcontroller and RF ModuleDocument56 pagesCity". We Implemented Using PIC Microcontroller and RF ModuleSai RakeshNo ratings yet
- 8051 Microcontroller Part 1Document21 pages8051 Microcontroller Part 1Sardar IrfanullahNo ratings yet
- CA231-Microprocessors and Its Applications Short AnswersDocument15 pagesCA231-Microprocessors and Its Applications Short Answersapi-3770232100% (3)
- Unit Ii: PIC MicrocontrollersDocument59 pagesUnit Ii: PIC MicrocontrollersbalaNo ratings yet
- MCES Group ActivityDocument55 pagesMCES Group ActivitykartiksdanNo ratings yet
- Unit - I Difference Between Microprocessor and MicrocontrollerDocument30 pagesUnit - I Difference Between Microprocessor and MicrocontrollerGopinathan MNo ratings yet
- The 8086 Microprocessor ArchitectureDocument65 pagesThe 8086 Microprocessor Architecturetazeb AbebeNo ratings yet
- Microcontroller 8051 - PART1Document65 pagesMicrocontroller 8051 - PART1Shreyash ChaudhariNo ratings yet
- Introduction & Stepper MotorDocument45 pagesIntroduction & Stepper Motorchappidi anushaNo ratings yet
- DSP For Matlab and LabviewDocument215 pagesDSP For Matlab and LabviewchusmanullahNo ratings yet
- EEE 352 Analog Communication Systems Bet V A/B Assignment II DSBSC Modulation in MATLABDocument2 pagesEEE 352 Analog Communication Systems Bet V A/B Assignment II DSBSC Modulation in MATLABchusmanullahNo ratings yet
- Microcontroller Introduction Shaharyar MahmoodDocument36 pagesMicrocontroller Introduction Shaharyar MahmoodchusmanullahNo ratings yet
- Lecture 4 8-Bit+AVR+Instruction+SetLec4Document50 pagesLecture 4 8-Bit+AVR+Instruction+SetLec4chusmanullahNo ratings yet
- Digital Design Fundamentals Shaharyar MahmoodDocument15 pagesDigital Design Fundamentals Shaharyar MahmoodchusmanullahNo ratings yet
- Filtering in Frequency Domain Lab # 6: Digital Signal ProcessingDocument3 pagesFiltering in Frequency Domain Lab # 6: Digital Signal ProcessingchusmanullahNo ratings yet
- Representation of Difference Equation Filtering With Moving Averager Lab # 5Document2 pagesRepresentation of Difference Equation Filtering With Moving Averager Lab # 5chusmanullahNo ratings yet
- Sap Fi Financial Accountinglobal SettingsDocument41 pagesSap Fi Financial Accountinglobal SettingsSHubhamNo ratings yet
- Assignment No. 01 Semester: Spring 2022 CS601: Data Communication Total Marks: 20 Due DateDocument4 pagesAssignment No. 01 Semester: Spring 2022 CS601: Data Communication Total Marks: 20 Due DateUrwa RiazNo ratings yet
- Data Science Trends White Paper Open Source For EnterpriseDocument13 pagesData Science Trends White Paper Open Source For EnterpriseDaniel Julián Cárdenas OrtizNo ratings yet
- NetApp NCDA Exercise GuideDocument209 pagesNetApp NCDA Exercise GuideVinay KumarNo ratings yet
- 12 - HGcnc609D雕铣多功能数控系统使用手册 最新.zh-CN.enDocument70 pages12 - HGcnc609D雕铣多功能数控系统使用手册 最新.zh-CN.enKemal Rizky WahyudiNo ratings yet
- System InfoDocument3 pagesSystem InfoINVADERNo ratings yet
- Registration Process - Mobile App - SID India Skill 2023Document28 pagesRegistration Process - Mobile App - SID India Skill 2023Nishant SirohiNo ratings yet
- DX DiagDocument20 pagesDX DiagStephen NorrisNo ratings yet
- CSC2535: 2013 Advanced Machine Learning Lecture 8b: Image Retrieval Using Multilayer Neural NetworksDocument34 pagesCSC2535: 2013 Advanced Machine Learning Lecture 8b: Image Retrieval Using Multilayer Neural NetworksVAIJAYANTHI SNo ratings yet
- Pattern Printing in C - INFORTEC InternationalDocument19 pagesPattern Printing in C - INFORTEC InternationalIT Hub SLNo ratings yet
- Customer: Customer Number: Innodisk Number: Innodisk Model Name: DateDocument23 pagesCustomer: Customer Number: Innodisk Number: Innodisk Model Name: DateАндрейNo ratings yet
- VIRTUAL INSTRUMENTATION USING LabVIEW B00K7YGYW2 PDFDocument414 pagesVIRTUAL INSTRUMENTATION USING LabVIEW B00K7YGYW2 PDFHardik MinochaNo ratings yet
- Mainboard: Chipset To Power CircuitDocument4 pagesMainboard: Chipset To Power Circuitragav1234No ratings yet
- 12 - IntrudersDocument27 pages12 - IntrudersMangala SemageNo ratings yet
- End-User License AgreementDocument8 pagesEnd-User License AgreementMahboob IqbalNo ratings yet
- Data Flow Diagram (DFD)Document23 pagesData Flow Diagram (DFD)Evrich WatsonNo ratings yet
- Classical Waterfall Model:: Mid Questions and Answers - 4sets PDF By: Venu GopalDocument22 pagesClassical Waterfall Model:: Mid Questions and Answers - 4sets PDF By: Venu Gopalspider dogNo ratings yet
- Cyber Related Challenges and SolutionDocument5 pagesCyber Related Challenges and Solutionfelix feluNo ratings yet
- Computer Applications Vol - 1 EM - WWW - Governmentexams.co - inDocument272 pagesComputer Applications Vol - 1 EM - WWW - Governmentexams.co - insanNo ratings yet
- 9626 w20 QP 13 PDFDocument16 pages9626 w20 QP 13 PDFSly TDNo ratings yet
- How To Create An Uber Clone AppDocument9 pagesHow To Create An Uber Clone AppEva Ngankou2050No ratings yet
- Training Manual Omron Cp1E: Programmable Logic Control (PLC)Document37 pagesTraining Manual Omron Cp1E: Programmable Logic Control (PLC)adibNo ratings yet
- Null PDFDocument35 pagesNull PDFManju YadavNo ratings yet
- Iconverge Price ListDocument3 pagesIconverge Price ListPatrick Ramos0% (3)
- Zmsetup 07052014-112607Document19 pagesZmsetup 07052014-112607Cendol DodolNo ratings yet
- Google Operator Cheat SheetDocument2 pagesGoogle Operator Cheat SheetDouglas BoldtNo ratings yet