
Introduction To ARM Systems-11!17!2012
Introduction To ARM Systems-11!17!2012
You might also like
- LPDDR Tec104 SlidesDocument19 pagesLPDDR Tec104 SlidesHari BabuNo ratings yet
- GIC v3 ArchitectureDocument38 pagesGIC v3 ArchitectureAnjaliNo ratings yet
- Features of PCIe Phy LayerDocument6 pagesFeatures of PCIe Phy Layerdipin555100% (1)
- Employee Payroll and Task Management SystemDocument6 pagesEmployee Payroll and Task Management SystemPrakhar Singh PundhirNo ratings yet
- ARM ProcessorsDocument16 pagesARM ProcessorsyayavaramNo ratings yet
- ARM Operating ModesDocument152 pagesARM Operating Modesrammohan2b0% (1)
- ARM Processor ArchitectureDocument112 pagesARM Processor Architecturesr_velz100% (1)
- ARM Processors Lecture 2015-11-05Document169 pagesARM Processors Lecture 2015-11-05maheshbabu527No ratings yet
- ArmpptDocument168 pagesArmpptamit_k25No ratings yet
- Cortex - M3: Technical Reference ManualDocument133 pagesCortex - M3: Technical Reference ManualDuc Huy LeNo ratings yet
- ARM Interrupt ProcessingDocument33 pagesARM Interrupt Processinglovet essampongNo ratings yet
- An Introduction To JTAG Boundary Scan From Sun MicroelectronicsDocument10 pagesAn Introduction To JTAG Boundary Scan From Sun MicroelectronicsJoemill Veloso FlordelisNo ratings yet
- Arm BasicsDocument26 pagesArm BasicsManoah JayakaranNo ratings yet
- ARM Teaching MaterialDocument33 pagesARM Teaching MaterialViswa PraveenNo ratings yet
- Introduction To RISC-VDocument31 pagesIntroduction To RISC-Vsantyd100% (1)
- Unit 2 - ARM7 Based MicrocontrollerDocument106 pagesUnit 2 - ARM7 Based MicrocontrollerKunal Khandelwal100% (1)
- 8th Gen Core Family Datasheet Vol 1 Rev008Document140 pages8th Gen Core Family Datasheet Vol 1 Rev008strip1No ratings yet
- Linux As An SPI Slave HandoutsDocument41 pagesLinux As An SPI Slave HandoutsJohnNo ratings yet
- Advanced Asic Chip SynthesisDocument126 pagesAdvanced Asic Chip SynthesispravinNo ratings yet
- Fpga Based System DesignDocument30 pagesFpga Based System DesignKrishna Kumar100% (1)
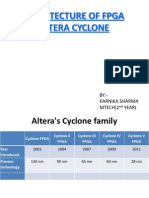
- Architecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)Document29 pagesArchitecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)karnika143100% (1)
- ARM CortexDocument20 pagesARM CortexivanmeyerNo ratings yet
- ARM STM32F407 InterruptsDocument38 pagesARM STM32F407 Interruptsronaldo008100% (2)
- ESARM Unit-III and IV Slides MergedDocument301 pagesESARM Unit-III and IV Slides MergedShashipreetham LakkakulaNo ratings yet
- Embedded SystemsDocument2 pagesEmbedded SystemsKavitha SubramaniamNo ratings yet
- ARM CORTEX M4 Memory LayoutDocument11 pagesARM CORTEX M4 Memory LayoutGurram KishoreNo ratings yet
- 03 PCIe 3.0 PHY Electrical Layer Requirements FinalDocument49 pages03 PCIe 3.0 PHY Electrical Layer Requirements FinalSubhadeep DattaNo ratings yet
- SPI For Multiprocessor CommunicationDocument44 pagesSPI For Multiprocessor CommunicationFaizan Ali HaiderNo ratings yet
- ARM Cortex-M0 OverviewDocument40 pagesARM Cortex-M0 OverviewKunil KudaNo ratings yet
- Tutorials For STM32F103RB: Nicolas BarbotDocument13 pagesTutorials For STM32F103RB: Nicolas BarbotcarNo ratings yet
- Quartus Command LineDocument26 pagesQuartus Command LineAbed MomaniNo ratings yet
- Lal Usb Interface Vlsi 2010Document22 pagesLal Usb Interface Vlsi 2010Ygb RedaNo ratings yet
- Arduino Uno Start Document 5 2022Document14 pagesArduino Uno Start Document 5 2022Eashvar SrinivasanNo ratings yet
- Multichannel UartDocument16 pagesMultichannel UartMani Bharath Nuti100% (2)
- Understanding DDR - DDR Protocol - Truechip VIPsDocument9 pagesUnderstanding DDR - DDR Protocol - Truechip VIPssantosh soodNo ratings yet
- Dxdesigner UserDocument448 pagesDxdesigner UserMokorily PalmerstonNo ratings yet
- RTL Design FSM With DatapathDocument47 pagesRTL Design FSM With DatapathamaanrizaNo ratings yet
- ARM - An Understanding and MoreDocument87 pagesARM - An Understanding and MoreSivasini Netra S ANo ratings yet
- Design of 45GHz Freq Generation CircuitsDocument209 pagesDesign of 45GHz Freq Generation CircuitsMendu PrashanthNo ratings yet
- FPGA ArchitectureDocument39 pagesFPGA ArchitectureeeshgargNo ratings yet
- Cadence Fpga Board Design FSP Intro PRESENTATIONDocument18 pagesCadence Fpga Board Design FSP Intro PRESENTATIONsamarra250% (1)
- Tiva C Series LaunchPadDocument152 pagesTiva C Series LaunchPadhuyvt01No ratings yet
- Open Core Protocol Specification 3.0Document494 pagesOpen Core Protocol Specification 3.0darkknight1432No ratings yet
- Cortex R4 White PaperDocument20 pagesCortex R4 White PaperRAJARAMNo ratings yet
- Design and Modeling of I2C Bus ControllerDocument49 pagesDesign and Modeling of I2C Bus ControllerAmareshChaligeriNo ratings yet
- ARM ArchitectureDocument26 pagesARM ArchitectureKiran KumarNo ratings yet
- MCES Group ActivityDocument55 pagesMCES Group ActivitykartiksdanNo ratings yet
- ESD Merged CS 01-11Document369 pagesESD Merged CS 01-11Slaney AguiarNo ratings yet
- Unit Ii ArmDocument243 pagesUnit Ii ArmMani BharathiNo ratings yet
- DDR Basics FrescaleDocument53 pagesDDR Basics FrescaleJoseph PradeebanNo ratings yet
- Introduction To Asics: Ni Logic Pvt. LTD., PuneDocument84 pagesIntroduction To Asics: Ni Logic Pvt. LTD., PuneankurNo ratings yet
- Computer ArchitectureDocument104 pagesComputer ArchitectureapuurvaNo ratings yet
- ARM ArchitectureDocument16 pagesARM ArchitectureS S0% (1)
- DDI0475C Corelink Nic400 Network Interconnect r0p2 TRMDocument74 pagesDDI0475C Corelink Nic400 Network Interconnect r0p2 TRMSomasekhar ChepuriNo ratings yet
- ARM Introduction & Instruction Set ArchitectureDocument71 pagesARM Introduction & Instruction Set Architecturebala100% (1)
- Digital Design Using Verilog HDLDocument108 pagesDigital Design Using Verilog HDLNihar PandaNo ratings yet
- The 37 Best Websites To Learn Something New - Life Learning - MediumDocument6 pagesThe 37 Best Websites To Learn Something New - Life Learning - Mediumimoptra143No ratings yet
- Why The Most Productive People Don't Multi-Task - Inc42 MediaDocument7 pagesWhy The Most Productive People Don't Multi-Task - Inc42 Mediaimoptra143No ratings yet
- 3 Pieces of Warren Buffett Wisdom For An Expensive Stock Market - The Motley FoolDocument6 pages3 Pieces of Warren Buffett Wisdom For An Expensive Stock Market - The Motley Foolimoptra143No ratings yet
- SP14 CS188 Lecture 3 - Informed SearchDocument69 pagesSP14 CS188 Lecture 3 - Informed Searchimoptra143No ratings yet
- Sp14 Cs188 Lecture 5 - Csps IIDocument38 pagesSp14 Cs188 Lecture 5 - Csps IIimoptra143No ratings yet
- Algo Ds Bloom AnnotatedDocument8 pagesAlgo Ds Bloom Annotatedimoptra143No ratings yet
- Odi 12c Getting Started GuideDocument114 pagesOdi 12c Getting Started Guideimoptra143No ratings yet
- Python Tutorial For Beginners - Learn Python Programming Language Basics - IntellipaatDocument39 pagesPython Tutorial For Beginners - Learn Python Programming Language Basics - IntellipaatDeven RajNo ratings yet
- Embedded SystemsDocument2 pagesEmbedded SystemsGanesh GoturNo ratings yet
- Advanced RExcel Setup GuideDocument13 pagesAdvanced RExcel Setup GuideIvan AliagaNo ratings yet
- Crowdsurf GlossaryDocument6 pagesCrowdsurf GlossaryKenneth Ian RiveraNo ratings yet
- Computer Science (2210) Sample Paper For O Level 1Document9 pagesComputer Science (2210) Sample Paper For O Level 1Mehwish TahirNo ratings yet
- (Nand Flash Memory) HY27 (U - S) S (08 - 16) 121M (Rev0.6)Document43 pages(Nand Flash Memory) HY27 (U - S) S (08 - 16) 121M (Rev0.6)jituelectNo ratings yet
- Osimis Web Viewer DocumentationDocument15 pagesOsimis Web Viewer DocumentationleandrovaffonsoNo ratings yet
- Domain Name SystemDocument39 pagesDomain Name SystemRavi SrinivasNo ratings yet
- JSP ArchitectureDocument28 pagesJSP Architectureapi-3802159No ratings yet
- Manual B30Document336 pagesManual B30Juan PavezNo ratings yet
- Cbse - Department of Skill Education: Information Technology (Subject Code 802)Document2 pagesCbse - Department of Skill Education: Information Technology (Subject Code 802)alka dkakaNo ratings yet
- Chapter 1 Ece351 Digital SystemsDocument49 pagesChapter 1 Ece351 Digital SystemsAfeef Abu BakarNo ratings yet
- Die-Hard Battery Calibrator RC8.ShDocument6 pagesDie-Hard Battery Calibrator RC8.Shgayan_sharma862No ratings yet
- Chapter 2 Non Primitive Data TypesDocument14 pagesChapter 2 Non Primitive Data TypesBENJIE ZARATENo ratings yet
- 29.1 Flexi Capacity Extension Sub-Module (FBBA) OperationDocument3 pages29.1 Flexi Capacity Extension Sub-Module (FBBA) OperationАндрей СвининNo ratings yet
- Health Checks - Ceph DocumentationDocument10 pagesHealth Checks - Ceph DocumentationemersondcamaraNo ratings yet
- CSS Lesson 6 Driver Installation and UpdatesDocument18 pagesCSS Lesson 6 Driver Installation and Updatesdelacruzkeizia3No ratings yet
- EVE Comm BOOK 5.0 2022Document150 pagesEVE Comm BOOK 5.0 2022teamleaderNo ratings yet
- Java Threading AssignmentDocument32 pagesJava Threading Assignmentkumarharsh100% (2)
- ROS Cheat Sheet v1.01 1Document1 pageROS Cheat Sheet v1.01 1hbuddyNo ratings yet
- MCCC 3.0.2 TroubleshooterDocument13 pagesMCCC 3.0.2 TroubleshooterMiram BeasleyNo ratings yet
- DD SSCERuntime MSI62F0Document47 pagesDD SSCERuntime MSI62F0Ankur SachanNo ratings yet
- C++ Basic PracticalsDocument5 pagesC++ Basic PracticalsZohaib HamduleNo ratings yet
- TutorialFlexBison PDFDocument2 pagesTutorialFlexBison PDFAnoop ChauhanNo ratings yet
- Elementary OS Jupiter Customization GuideDocument2 pagesElementary OS Jupiter Customization GuideJavierRochaNo ratings yet
- JOIN - Viva Clipper !Document2 pagesJOIN - Viva Clipper !Jose CorderoNo ratings yet
- Steve Jobs - Early Playboy InterviewDocument5 pagesSteve Jobs - Early Playboy Interviewhuhu2012No ratings yet
- Unit-1 Introduction To ASP - NET Web Programming - IDE-Attachment-1 - 02-04-2021-08-40-01Document35 pagesUnit-1 Introduction To ASP - NET Web Programming - IDE-Attachment-1 - 02-04-2021-08-40-01ManavNo ratings yet
- P89LPC922 User ManualDocument124 pagesP89LPC922 User Manualapi-3845765No ratings yet






























































































Download as pptx, pdf, or txt
You might also like
- LPDDR Tec104 SlidesDocument19 pagesLPDDR Tec104 SlidesHari BabuNo ratings yet
- GIC v3 ArchitectureDocument38 pagesGIC v3 ArchitectureAnjaliNo ratings yet
- Features of PCIe Phy LayerDocument6 pagesFeatures of PCIe Phy Layerdipin555100% (1)
- Employee Payroll and Task Management SystemDocument6 pagesEmployee Payroll and Task Management SystemPrakhar Singh PundhirNo ratings yet
- ARM ProcessorsDocument16 pagesARM ProcessorsyayavaramNo ratings yet
- ARM Operating ModesDocument152 pagesARM Operating Modesrammohan2b0% (1)
- ARM Processor ArchitectureDocument112 pagesARM Processor Architecturesr_velz100% (1)
- ARM Processors Lecture 2015-11-05Document169 pagesARM Processors Lecture 2015-11-05maheshbabu527No ratings yet
- ArmpptDocument168 pagesArmpptamit_k25No ratings yet
- Cortex - M3: Technical Reference ManualDocument133 pagesCortex - M3: Technical Reference ManualDuc Huy LeNo ratings yet
- ARM Interrupt ProcessingDocument33 pagesARM Interrupt Processinglovet essampongNo ratings yet
- An Introduction To JTAG Boundary Scan From Sun MicroelectronicsDocument10 pagesAn Introduction To JTAG Boundary Scan From Sun MicroelectronicsJoemill Veloso FlordelisNo ratings yet
- Arm BasicsDocument26 pagesArm BasicsManoah JayakaranNo ratings yet
- ARM Teaching MaterialDocument33 pagesARM Teaching MaterialViswa PraveenNo ratings yet
- Introduction To RISC-VDocument31 pagesIntroduction To RISC-Vsantyd100% (1)
- Unit 2 - ARM7 Based MicrocontrollerDocument106 pagesUnit 2 - ARM7 Based MicrocontrollerKunal Khandelwal100% (1)
- 8th Gen Core Family Datasheet Vol 1 Rev008Document140 pages8th Gen Core Family Datasheet Vol 1 Rev008strip1No ratings yet
- Linux As An SPI Slave HandoutsDocument41 pagesLinux As An SPI Slave HandoutsJohnNo ratings yet
- Advanced Asic Chip SynthesisDocument126 pagesAdvanced Asic Chip SynthesispravinNo ratings yet
- Fpga Based System DesignDocument30 pagesFpga Based System DesignKrishna Kumar100% (1)
- Architecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)Document29 pagesArchitecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)karnika143100% (1)
- ARM CortexDocument20 pagesARM CortexivanmeyerNo ratings yet
- ARM STM32F407 InterruptsDocument38 pagesARM STM32F407 Interruptsronaldo008100% (2)
- ESARM Unit-III and IV Slides MergedDocument301 pagesESARM Unit-III and IV Slides MergedShashipreetham LakkakulaNo ratings yet
- Embedded SystemsDocument2 pagesEmbedded SystemsKavitha SubramaniamNo ratings yet
- ARM CORTEX M4 Memory LayoutDocument11 pagesARM CORTEX M4 Memory LayoutGurram KishoreNo ratings yet
- 03 PCIe 3.0 PHY Electrical Layer Requirements FinalDocument49 pages03 PCIe 3.0 PHY Electrical Layer Requirements FinalSubhadeep DattaNo ratings yet
- SPI For Multiprocessor CommunicationDocument44 pagesSPI For Multiprocessor CommunicationFaizan Ali HaiderNo ratings yet
- ARM Cortex-M0 OverviewDocument40 pagesARM Cortex-M0 OverviewKunil KudaNo ratings yet
- Tutorials For STM32F103RB: Nicolas BarbotDocument13 pagesTutorials For STM32F103RB: Nicolas BarbotcarNo ratings yet
- Quartus Command LineDocument26 pagesQuartus Command LineAbed MomaniNo ratings yet
- Lal Usb Interface Vlsi 2010Document22 pagesLal Usb Interface Vlsi 2010Ygb RedaNo ratings yet
- Arduino Uno Start Document 5 2022Document14 pagesArduino Uno Start Document 5 2022Eashvar SrinivasanNo ratings yet
- Multichannel UartDocument16 pagesMultichannel UartMani Bharath Nuti100% (2)
- Understanding DDR - DDR Protocol - Truechip VIPsDocument9 pagesUnderstanding DDR - DDR Protocol - Truechip VIPssantosh soodNo ratings yet
- Dxdesigner UserDocument448 pagesDxdesigner UserMokorily PalmerstonNo ratings yet
- RTL Design FSM With DatapathDocument47 pagesRTL Design FSM With DatapathamaanrizaNo ratings yet
- ARM - An Understanding and MoreDocument87 pagesARM - An Understanding and MoreSivasini Netra S ANo ratings yet
- Design of 45GHz Freq Generation CircuitsDocument209 pagesDesign of 45GHz Freq Generation CircuitsMendu PrashanthNo ratings yet
- FPGA ArchitectureDocument39 pagesFPGA ArchitectureeeshgargNo ratings yet
- Cadence Fpga Board Design FSP Intro PRESENTATIONDocument18 pagesCadence Fpga Board Design FSP Intro PRESENTATIONsamarra250% (1)
- Tiva C Series LaunchPadDocument152 pagesTiva C Series LaunchPadhuyvt01No ratings yet
- Open Core Protocol Specification 3.0Document494 pagesOpen Core Protocol Specification 3.0darkknight1432No ratings yet
- Cortex R4 White PaperDocument20 pagesCortex R4 White PaperRAJARAMNo ratings yet
- Design and Modeling of I2C Bus ControllerDocument49 pagesDesign and Modeling of I2C Bus ControllerAmareshChaligeriNo ratings yet
- ARM ArchitectureDocument26 pagesARM ArchitectureKiran KumarNo ratings yet
- MCES Group ActivityDocument55 pagesMCES Group ActivitykartiksdanNo ratings yet
- ESD Merged CS 01-11Document369 pagesESD Merged CS 01-11Slaney AguiarNo ratings yet
- Unit Ii ArmDocument243 pagesUnit Ii ArmMani BharathiNo ratings yet
- DDR Basics FrescaleDocument53 pagesDDR Basics FrescaleJoseph PradeebanNo ratings yet
- Introduction To Asics: Ni Logic Pvt. LTD., PuneDocument84 pagesIntroduction To Asics: Ni Logic Pvt. LTD., PuneankurNo ratings yet
- Computer ArchitectureDocument104 pagesComputer ArchitectureapuurvaNo ratings yet
- ARM ArchitectureDocument16 pagesARM ArchitectureS S0% (1)
- DDI0475C Corelink Nic400 Network Interconnect r0p2 TRMDocument74 pagesDDI0475C Corelink Nic400 Network Interconnect r0p2 TRMSomasekhar ChepuriNo ratings yet
- ARM Introduction & Instruction Set ArchitectureDocument71 pagesARM Introduction & Instruction Set Architecturebala100% (1)
- Digital Design Using Verilog HDLDocument108 pagesDigital Design Using Verilog HDLNihar PandaNo ratings yet
- The 37 Best Websites To Learn Something New - Life Learning - MediumDocument6 pagesThe 37 Best Websites To Learn Something New - Life Learning - Mediumimoptra143No ratings yet
- Why The Most Productive People Don't Multi-Task - Inc42 MediaDocument7 pagesWhy The Most Productive People Don't Multi-Task - Inc42 Mediaimoptra143No ratings yet
- 3 Pieces of Warren Buffett Wisdom For An Expensive Stock Market - The Motley FoolDocument6 pages3 Pieces of Warren Buffett Wisdom For An Expensive Stock Market - The Motley Foolimoptra143No ratings yet
- SP14 CS188 Lecture 3 - Informed SearchDocument69 pagesSP14 CS188 Lecture 3 - Informed Searchimoptra143No ratings yet
- Sp14 Cs188 Lecture 5 - Csps IIDocument38 pagesSp14 Cs188 Lecture 5 - Csps IIimoptra143No ratings yet
- Algo Ds Bloom AnnotatedDocument8 pagesAlgo Ds Bloom Annotatedimoptra143No ratings yet
- Odi 12c Getting Started GuideDocument114 pagesOdi 12c Getting Started Guideimoptra143No ratings yet
- Python Tutorial For Beginners - Learn Python Programming Language Basics - IntellipaatDocument39 pagesPython Tutorial For Beginners - Learn Python Programming Language Basics - IntellipaatDeven RajNo ratings yet
- Embedded SystemsDocument2 pagesEmbedded SystemsGanesh GoturNo ratings yet
- Advanced RExcel Setup GuideDocument13 pagesAdvanced RExcel Setup GuideIvan AliagaNo ratings yet
- Crowdsurf GlossaryDocument6 pagesCrowdsurf GlossaryKenneth Ian RiveraNo ratings yet
- Computer Science (2210) Sample Paper For O Level 1Document9 pagesComputer Science (2210) Sample Paper For O Level 1Mehwish TahirNo ratings yet
- (Nand Flash Memory) HY27 (U - S) S (08 - 16) 121M (Rev0.6)Document43 pages(Nand Flash Memory) HY27 (U - S) S (08 - 16) 121M (Rev0.6)jituelectNo ratings yet
- Osimis Web Viewer DocumentationDocument15 pagesOsimis Web Viewer DocumentationleandrovaffonsoNo ratings yet
- Domain Name SystemDocument39 pagesDomain Name SystemRavi SrinivasNo ratings yet
- JSP ArchitectureDocument28 pagesJSP Architectureapi-3802159No ratings yet
- Manual B30Document336 pagesManual B30Juan PavezNo ratings yet
- Cbse - Department of Skill Education: Information Technology (Subject Code 802)Document2 pagesCbse - Department of Skill Education: Information Technology (Subject Code 802)alka dkakaNo ratings yet
- Chapter 1 Ece351 Digital SystemsDocument49 pagesChapter 1 Ece351 Digital SystemsAfeef Abu BakarNo ratings yet
- Die-Hard Battery Calibrator RC8.ShDocument6 pagesDie-Hard Battery Calibrator RC8.Shgayan_sharma862No ratings yet
- Chapter 2 Non Primitive Data TypesDocument14 pagesChapter 2 Non Primitive Data TypesBENJIE ZARATENo ratings yet
- 29.1 Flexi Capacity Extension Sub-Module (FBBA) OperationDocument3 pages29.1 Flexi Capacity Extension Sub-Module (FBBA) OperationАндрей СвининNo ratings yet
- Health Checks - Ceph DocumentationDocument10 pagesHealth Checks - Ceph DocumentationemersondcamaraNo ratings yet
- CSS Lesson 6 Driver Installation and UpdatesDocument18 pagesCSS Lesson 6 Driver Installation and Updatesdelacruzkeizia3No ratings yet
- EVE Comm BOOK 5.0 2022Document150 pagesEVE Comm BOOK 5.0 2022teamleaderNo ratings yet
- Java Threading AssignmentDocument32 pagesJava Threading Assignmentkumarharsh100% (2)
- ROS Cheat Sheet v1.01 1Document1 pageROS Cheat Sheet v1.01 1hbuddyNo ratings yet
- MCCC 3.0.2 TroubleshooterDocument13 pagesMCCC 3.0.2 TroubleshooterMiram BeasleyNo ratings yet
- DD SSCERuntime MSI62F0Document47 pagesDD SSCERuntime MSI62F0Ankur SachanNo ratings yet
- C++ Basic PracticalsDocument5 pagesC++ Basic PracticalsZohaib HamduleNo ratings yet
- TutorialFlexBison PDFDocument2 pagesTutorialFlexBison PDFAnoop ChauhanNo ratings yet
- Elementary OS Jupiter Customization GuideDocument2 pagesElementary OS Jupiter Customization GuideJavierRochaNo ratings yet
- JOIN - Viva Clipper !Document2 pagesJOIN - Viva Clipper !Jose CorderoNo ratings yet
- Steve Jobs - Early Playboy InterviewDocument5 pagesSteve Jobs - Early Playboy Interviewhuhu2012No ratings yet
- Unit-1 Introduction To ASP - NET Web Programming - IDE-Attachment-1 - 02-04-2021-08-40-01Document35 pagesUnit-1 Introduction To ASP - NET Web Programming - IDE-Attachment-1 - 02-04-2021-08-40-01ManavNo ratings yet
- P89LPC922 User ManualDocument124 pagesP89LPC922 User Manualapi-3845765No ratings yet