Download as docx, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Solar Power DIY HandbookDocument58 pagesSolar Power DIY HandbookManuelNo ratings yet
- YaskawaDocument375 pagesYaskawaCristian IozsaNo ratings yet
- Private Healthcare Competition AssessmentDocument71 pagesPrivate Healthcare Competition AssessmentKhurram PervaizNo ratings yet
- Punjab Police Performance DataDocument16 pagesPunjab Police Performance DataKhurram PervaizNo ratings yet
- Another Holy CowDocument3 pagesAnother Holy CowKhurram PervaizNo ratings yet
- 37th CTP Tour of FBRDocument4 pages37th CTP Tour of FBRKhurram PervaizNo ratings yet
- An Omen of Worst AdministrationDocument1 pageAn Omen of Worst AdministrationKhurram PervaizNo ratings yet
- ZN1 ManualDocument40 pagesZN1 Manualpkgoyal1983No ratings yet
- Presentation Semiconductor DiodesDocument19 pagesPresentation Semiconductor DiodesMamta Kumari (B21CI025)No ratings yet
- RST PDocument11 pagesRST PHamid JamilNo ratings yet
- Grade 7 Physics Electricity WorkbookDocument45 pagesGrade 7 Physics Electricity WorkbookVasanthan RajuNo ratings yet
- Linear TransformerDocument44 pagesLinear TransformerRonmark AbinoNo ratings yet
- M-Tech - Electrical - PEMD-Structure - Syllabus - August 2019Document43 pagesM-Tech - Electrical - PEMD-Structure - Syllabus - August 2019Kanchan GordeNo ratings yet
- Alesis RA500 Power AmplifierDocument32 pagesAlesis RA500 Power AmplifierputitibiNo ratings yet
- Atasheet Na2Xsy XLPE Insulated Single-Core Cable With PVC Outer SheathDocument2 pagesAtasheet Na2Xsy XLPE Insulated Single-Core Cable With PVC Outer SheathRaka JoniNo ratings yet
- Facts PPTDocument20 pagesFacts PPTHaripriya k aNo ratings yet
- Electric Fields: StorylineDocument68 pagesElectric Fields: StorylineAyeshaNo ratings yet
- MiCOM P139 Feeder Management and Bay ControlDocument4 pagesMiCOM P139 Feeder Management and Bay Controlshaikhsajid242No ratings yet
- Chapter 2, Unit 5, Pharmaceutical Analysis, B Pharmacy 1st Sem, Carewell PharmaDocument8 pagesChapter 2, Unit 5, Pharmaceutical Analysis, B Pharmacy 1st Sem, Carewell Pharmayprv749kftNo ratings yet
- NMR - History - VarianDocument20 pagesNMR - History - VarianlauracmorrisNo ratings yet
- Application of A.C Motor in Industrial EOT CranesDocument20 pagesApplication of A.C Motor in Industrial EOT CranesBalaki SrikanthNo ratings yet
- Transmission Line Differential & Phase - Selector Guide: Features Device L30 L90 P541/2 P543 P544 P545Document4 pagesTransmission Line Differential & Phase - Selector Guide: Features Device L30 L90 P541/2 P543 P544 P545DIWAKAR NNo ratings yet
- S221 NTLWDocument17 pagesS221 NTLWCarlos JimenezNo ratings yet
- Eddy Current IntroductionDocument21 pagesEddy Current IntroductionTerfaia NadjatNo ratings yet
- Nissan FrontierDocument74 pagesNissan FrontiercesarNo ratings yet
- SL60 and SL100 Plasma Torch Operating ManualDocument13 pagesSL60 and SL100 Plasma Torch Operating ManualSIVARAMANJAGANATHANNo ratings yet
- Performance Analysis of Commercial Accelerometers of Different TechnologiesDocument6 pagesPerformance Analysis of Commercial Accelerometers of Different TechnologiesEmerson Müller Juarez AvilaNo ratings yet
- Etalko-Technical Data Switching Power Supply Units and Wide Range Switching Power Supply UnitsDocument1 pageEtalko-Technical Data Switching Power Supply Units and Wide Range Switching Power Supply Unitsbion.icleNo ratings yet
- MR422X4587D050Document57 pagesMR422X4587D050grigoremargaritNo ratings yet
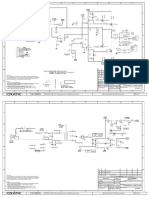
- Bass Amplifier PCB Schematics (473SCH - 0)Document2 pagesBass Amplifier PCB Schematics (473SCH - 0)Saurabh VaidyaNo ratings yet
- Sadelco DM JR 400Document1 pageSadelco DM JR 400Jim RNo ratings yet
- A DSP Laboratory Platform For Teaching Power Electronics and Drives, 1998.Document6 pagesA DSP Laboratory Platform For Teaching Power Electronics and Drives, 1998.Ali H. NumanNo ratings yet
- Irfr 2407Document11 pagesIrfr 2407gonf1No ratings yet
- Overhauling 10kw Induction MotorDocument6 pagesOverhauling 10kw Induction MotorRamprabu ChandrasekarNo ratings yet
- Relay Generator Protection f1 BTG 2Document11 pagesRelay Generator Protection f1 BTG 2beby nisaNo ratings yet