Download as pdf or txt
You might also like
- Jolly Grammar Programme P1-6Document8 pagesJolly Grammar Programme P1-6Mandy Whorlow100% (3)
- Module 4 Physical Layer and Module 6 Logical LayerDocument3 pagesModule 4 Physical Layer and Module 6 Logical LayerEmmanuel PalomaNo ratings yet
- All About SAP - How To Use F110 in Sap - Step by StepDocument3 pagesAll About SAP - How To Use F110 in Sap - Step by StepAnanthakumar ANo ratings yet
- Cinderella by Roald DahlDocument5 pagesCinderella by Roald DahlRaquel Gonzalez33% (3)
- List of Documents NBA PfilesDocument48 pagesList of Documents NBA PfilesDr. A. Pathanjali Sastri100% (1)
- The Soul of An Octopus - Favorite QuotesDocument7 pagesThe Soul of An Octopus - Favorite QuotesTanya RodmanNo ratings yet
- 第二章Document103 pages第二章kcfulerNo ratings yet
- Lan Wan PresentationDocument43 pagesLan Wan PresentationsonaltopiwalaNo ratings yet
- Lecture 1 - 2Document41 pagesLecture 1 - 2Wasif Ali BSS EngineerNo ratings yet
- Ch.4 Ethernet SpecificationsDocument26 pagesCh.4 Ethernet Specificationsvictorbittar29No ratings yet
- Verilog Modeling of Wi-Fi MAC Layer For TransmitterDocument6 pagesVerilog Modeling of Wi-Fi MAC Layer For TransmitterIJSTENo ratings yet
- Chapter 4Document26 pagesChapter 4Kieren ReynoldsNo ratings yet
- Unit-2 ANP MSDocument69 pagesUnit-2 ANP MSKeep learningNo ratings yet
- ELK455E Application-2018Document36 pagesELK455E Application-2018Melek KüçükNo ratings yet
- 151x Ccna 1 Ejw CH 9 AnswersDocument12 pages151x Ccna 1 Ejw CH 9 Answersapi-3842231100% (3)
- City & Guilds Technician Diploma in Applied Telecommunication SystemsDocument12 pagesCity & Guilds Technician Diploma in Applied Telecommunication SystemsShalika KusumsiriNo ratings yet
- BCMSN: Cisco CCNPDocument111 pagesBCMSN: Cisco CCNPassane2mcsNo ratings yet
- BCMSN: Cisco CCNPDocument111 pagesBCMSN: Cisco CCNPeben_swanepoelNo ratings yet
- BICSI NG 15 Data Center Cabling Stefan NaudeDocument48 pagesBICSI NG 15 Data Center Cabling Stefan Naudeasl68yNo ratings yet
- Course Contents: Data Communications Grade Prof. Dr. Hassan H. Soliman Dr. Mostafa Elgayar Part 5 P1Document20 pagesCourse Contents: Data Communications Grade Prof. Dr. Hassan H. Soliman Dr. Mostafa Elgayar Part 5 P1saher waleedNo ratings yet
- S7 Ethernet-Local Area Network: GROUP: 4960 Members: William Obaco Alexander Méndez Raúl SaltosDocument47 pagesS7 Ethernet-Local Area Network: GROUP: 4960 Members: William Obaco Alexander Méndez Raúl SaltosByron Xavier Lima CedilloNo ratings yet
- Capter 4Document8 pagesCapter 4newNo ratings yet
- Mid-Term Training Bharti Airtel:: Sandhya Kumari (Ue165101) : Dr. Gurpreet KaurDocument37 pagesMid-Term Training Bharti Airtel:: Sandhya Kumari (Ue165101) : Dr. Gurpreet KaurWonder womenNo ratings yet
- Topic 5.1 - EthernetDocument11 pagesTopic 5.1 - EthernetKevin NdyabandihoNo ratings yet
- NETW 310: Wired, Optical and Wireless CommunicationsDocument10 pagesNETW 310: Wired, Optical and Wireless CommunicationsMarvel RamliNo ratings yet
- UntitledDocument21 pagesUntitledAdam ElsheikhNo ratings yet
- Networking Concepts and HardwareDocument28 pagesNetworking Concepts and HardwareVandhana PramodhanNo ratings yet
- Network Cabling and Devices: Implementation Techniques of Various TypesDocument67 pagesNetwork Cabling and Devices: Implementation Techniques of Various Typescrimefighter31No ratings yet
- Topology (Network Design) : White White White White White White White WhiteDocument43 pagesTopology (Network Design) : White White White White White White White WhiteMohsin AhmadNo ratings yet
- CCNA 1-RS CH 4 - Network AccessDocument71 pagesCCNA 1-RS CH 4 - Network AccessMatt PeciNo ratings yet
- Course: Be Cse & B.Tech IT Cs8591 Computer Networks Sem & Class: V Sem Iii Cse & It Duration: 1 Hour 30 Mins Maximum: 50 Marks Answer ALL QuestionsDocument7 pagesCourse: Be Cse & B.Tech IT Cs8591 Computer Networks Sem & Class: V Sem Iii Cse & It Duration: 1 Hour 30 Mins Maximum: 50 Marks Answer ALL QuestionsVidhya RajNo ratings yet
- Ethernet 2 ChapterDocument73 pagesEthernet 2 ChapterSunilNo ratings yet
- Project: Dreamz IncDocument13 pagesProject: Dreamz IncLarry FryeNo ratings yet
- Introduction To Networking: Robust Industrial Data Communications - Made EasyDocument44 pagesIntroduction To Networking: Robust Industrial Data Communications - Made EasySanthosh V RaajendiranNo ratings yet
- Broadcast Communication Networks: Version 2 CSE IIT, KharagpurDocument13 pagesBroadcast Communication Networks: Version 2 CSE IIT, Kharagpurdarebusi1No ratings yet
- Wired Lans and Ethernet: 01204325: Data Communication and Computer NetworksDocument53 pagesWired Lans and Ethernet: 01204325: Data Communication and Computer NetworksshaniraNo ratings yet
- Lecture 3Document26 pagesLecture 3api-3701823No ratings yet
- Local Area Networks: 7.1 ObjectivesDocument66 pagesLocal Area Networks: 7.1 ObjectivesAhmedNo ratings yet
- BCSE2052 - Lab Manual - StudentVerDocument63 pagesBCSE2052 - Lab Manual - StudentVerAniket SharmaNo ratings yet
- To Identify Where The Frame Starts and Ends To Distinguish Data Bits From Control BitsDocument6 pagesTo Identify Where The Frame Starts and Ends To Distinguish Data Bits From Control BitsLeonardo Alberto Conde TorresNo ratings yet
- Maipu ROUTER SeriesDocument58 pagesMaipu ROUTER Seriessurender_snd1100% (1)
- Basic Data Communication Technology: JKKD Mti Ui 2009 1Document44 pagesBasic Data Communication Technology: JKKD Mti Ui 2009 1mgrin30No ratings yet
- Instructor: & Todd LammleDocument29 pagesInstructor: & Todd LammleEng-Mushtaq HejairaNo ratings yet
- Ethernet Theory of Operation PDFDocument26 pagesEthernet Theory of Operation PDFJDTNo ratings yet
- 1-Wire - The Technology For Sensor NetworksDocument4 pages1-Wire - The Technology For Sensor NetworksHenrique ThielNo ratings yet
- Coral Apollo - 155: Stm-1 Customer Premises Equipment (Cpe)Document4 pagesCoral Apollo - 155: Stm-1 Customer Premises Equipment (Cpe)ramNo ratings yet
- PDF To WordDocument64 pagesPDF To WordAAKASHNo ratings yet
- Aardvark v3.30Document62 pagesAardvark v3.30Agustín RamírezNo ratings yet
- LAN Standards and Data Link Layer: Network TechnologyDocument19 pagesLAN Standards and Data Link Layer: Network TechnologygazNo ratings yet
- Fibre Channel, or FC, Is ADocument15 pagesFibre Channel, or FC, Is ARamchandra KasapuramNo ratings yet
- By - Megha Thirki Aditya Sy BSC ItDocument30 pagesBy - Megha Thirki Aditya Sy BSC Itmegha thirkiNo ratings yet
- DATACOM Ethernet Switches DM2300 Carrier Access Switch SeriesDocument4 pagesDATACOM Ethernet Switches DM2300 Carrier Access Switch SeriesSEA Telecom NMC - OperaçõesNo ratings yet
- CCN Unit 4 PDFDocument27 pagesCCN Unit 4 PDFSharmila KrishnaswamyNo ratings yet
- Fieldbus OverviewDocument65 pagesFieldbus OverviewRajib Nag100% (1)
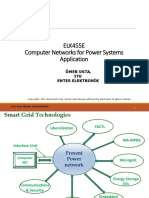
- ELK455E Computer Networks For Power Systems Application: Ömer Usta, ITU Entes ElektronikDocument37 pagesELK455E Computer Networks For Power Systems Application: Ömer Usta, ITU Entes Elektronikİbrahim ÖzdoğanNo ratings yet
- 4 4bluetoothDocument26 pages4 4bluetoothVishnuNo ratings yet
- BulkQuestion Junaid J&KDocument10 pagesBulkQuestion Junaid J&KJunaidNo ratings yet
- Com:Dtu: Router Design and FunctionalityDocument68 pagesCom:Dtu: Router Design and FunctionalityIftikhar JavedNo ratings yet
- TCS4 AptDocument105 pagesTCS4 AptPankaj kumarNo ratings yet
- InternetworkingDocument46 pagesInternetworkingWaliul BariNo ratings yet
- More 11871 eDocument4 pagesMore 11871 eRey Alberto AhumadaNo ratings yet
- Fundamentals of Telecommunication ExcercisesDocument16 pagesFundamentals of Telecommunication ExcercisesPhan AnNo ratings yet
- Connection-Oriented Networks: SONET/SDH, ATM, MPLS and Optical NetworksFrom EverandConnection-Oriented Networks: SONET/SDH, ATM, MPLS and Optical NetworksNo ratings yet
- Stepper MotorDocument32 pagesStepper Motorapi-26587237100% (2)
- Fpga ApplicationsDocument19 pagesFpga ApplicationsSanthi SriNo ratings yet
- Lesson 30Document24 pagesLesson 30Suranga SampathNo ratings yet
- Embedded Communications: Version 2 EE IIT, Kharagpur 1Document15 pagesEmbedded Communications: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Testing of Embedded System: Version 2 EE IIT, Kharagpur 1Document23 pagesTesting of Embedded System: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Design of Embedded Processors: Version 2 EE IIT, Kharagpur 1Document19 pagesDesign of Embedded Processors: Version 2 EE IIT, Kharagpur 1ahamedNo ratings yet
- Testing of Embedded System: Version 2 EE IIT, Kharagpur 1Document12 pagesTesting of Embedded System: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Task Scheduling IDocument21 pagesTask Scheduling IbennettmatthewNo ratings yet
- Embedded Communications: Version 2 EE IIT, Kharagpur 1Document11 pagesEmbedded Communications: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Beginners Introduction To The Assembly Language of ATMEL AVR MicroprocessorsDocument58 pagesBeginners Introduction To The Assembly Language of ATMEL AVR Microprocessorsapi-3698538100% (5)
- Verilog Lesson 21Document25 pagesVerilog Lesson 21123vidyaNo ratings yet
- Embedded Systems IO - Lesson 4Document12 pagesEmbedded Systems IO - Lesson 4Emin KültürelNo ratings yet
- Embedded Systems I/O: Version 2 EE IIT, Kharagpur 1Document14 pagesEmbedded Systems I/O: Version 2 EE IIT, Kharagpur 1ahamedNo ratings yet
- Embedded Systems I/O: Version 2 EE IIT, Kharagpur 1Document10 pagesEmbedded Systems I/O: Version 2 EE IIT, Kharagpur 1ahamed100% (2)
- Embedded Systems I/O: Version 2 EE IIT, Kharagpur 1Document20 pagesEmbedded Systems I/O: Version 2 EE IIT, Kharagpur 1ahamedNo ratings yet
- Lesson 14Document18 pagesLesson 14satsoexNo ratings yet
- Interrupt Structure of 8051Document16 pagesInterrupt Structure of 8051Amar SinghNo ratings yet
- Embedded Processors and Memory: Version 2 EE IIT, Kharagpur 1Document9 pagesEmbedded Processors and Memory: Version 2 EE IIT, Kharagpur 1ahamed100% (7)
- Lesson 11Document10 pagesLesson 11satsoexNo ratings yet
- Lesson 13Document22 pagesLesson 13satsoexNo ratings yet
- Embedded EbookDocument14 pagesEmbedded EbookDeepak BhatNo ratings yet
- Lesson 9Document11 pagesLesson 9satsoexNo ratings yet
- Lesson 1Document15 pagesLesson 1At TanwiNo ratings yet
- Embedded SystemDocument20 pagesEmbedded Systempra0408No ratings yet
- Lesson 2Document16 pagesLesson 2Raj PattanayakNo ratings yet
- Embedded Processors and Memory: Version 2 EE IIT, Kharagpur 1Document9 pagesEmbedded Processors and Memory: Version 2 EE IIT, Kharagpur 1ahamedNo ratings yet
- LessonDocument12 pagesLessonKapasi TejasNo ratings yet
- Version 2 EE IIT, Kharagpur 1Document15 pagesVersion 2 EE IIT, Kharagpur 1ahamed100% (1)
- The Holy Quran and ScienceDocument390 pagesThe Holy Quran and ScienceMoinullah Khan100% (6)
- Solar Wind EnergyDocument6 pagesSolar Wind Energyapi-26344848No ratings yet
- Alaina Dauscher - Career Journal #01Document2 pagesAlaina Dauscher - Career Journal #01Alaina DauscherNo ratings yet
- UnpublishedDocument7 pagesUnpublishedScribd Government DocsNo ratings yet
- Case Study of A Condemned Boiler & Methods To Re-Establish ItDocument43 pagesCase Study of A Condemned Boiler & Methods To Re-Establish Its sivaNo ratings yet
- Referee Report TemplateDocument2 pagesReferee Report TemplateAna Jufriani100% (1)
- Steve Nison - Candlestick Patterns - RezumatDocument22 pagesSteve Nison - Candlestick Patterns - RezumatSIightlyNo ratings yet
- Bilingualism Problems in NigeriaDocument9 pagesBilingualism Problems in NigeriaBasil OvuNo ratings yet
- Bac 1624 - ObeDocument4 pagesBac 1624 - ObeAmiee Laa PulokNo ratings yet
- Annual Return For A Company Limited by GuaranteeDocument4 pagesAnnual Return For A Company Limited by GuaranteeAtisang Tonny SethNo ratings yet
- Task Force On Sexual Assault and Interpersonal Violence Final Report 2014-15Document16 pagesTask Force On Sexual Assault and Interpersonal Violence Final Report 2014-15Fourth EstateNo ratings yet
- ENISA Secure Software Engineering InitiativesDocument96 pagesENISA Secure Software Engineering InitiativesstrokenfilledNo ratings yet
- Goldilocks and The Three Bears Model Text 2Document5 pagesGoldilocks and The Three Bears Model Text 2api-407594542No ratings yet
- View AnswerDocument112 pagesView Answershiv anantaNo ratings yet
- Test Method For DDF ProjectDocument13 pagesTest Method For DDF ProjectrantosbNo ratings yet
- Plyometric Training - Part I by Juan Carlos SantanaDocument2 pagesPlyometric Training - Part I by Juan Carlos SantanaPedro SilvaNo ratings yet
- Government of Karnataka: Only For Birth Verification PurposeDocument1 pageGovernment of Karnataka: Only For Birth Verification PurposeAmit VantagodiNo ratings yet
- Not in His Image (15th Anniversary Edition) - Preface and IntroDocument17 pagesNot in His Image (15th Anniversary Edition) - Preface and IntroChelsea Green PublishingNo ratings yet
- Autocad Layout Tutorial - EhowDocument3 pagesAutocad Layout Tutorial - EhowdidlakiranNo ratings yet
- Vii-Philosophy of HPERD & SportsDocument4 pagesVii-Philosophy of HPERD & SportsAnonymous hHT0iOyQAz100% (1)
- 3M Petrifilm Yeast and Mold Count Plate Raw Material Change FAQDocument3 pages3M Petrifilm Yeast and Mold Count Plate Raw Material Change FAQErwin DoloresNo ratings yet
- Operational Framework of Community Organizing ProcessDocument18 pagesOperational Framework of Community Organizing ProcessJan Paul Salud LugtuNo ratings yet
- Palaycheck System Based Rice Cultivation in The PhilippinesDocument125 pagesPalaycheck System Based Rice Cultivation in The PhilippinesRizalito BenitoNo ratings yet
- Russian General Speaks Out On UFOsDocument7 pagesRussian General Speaks Out On UFOsochaerryNo ratings yet
- The Oris Aquis Depth GaugeDocument2 pagesThe Oris Aquis Depth GaugeLord VarioNo ratings yet
- Grade 2 - 1ST Periodical TestDocument5 pagesGrade 2 - 1ST Periodical TestGAY IBANEZ100% (1)
- OutDocument318 pagesOutBet HalNo ratings yet