Download as ppt, pdf, or txt
You might also like
- Encyclopedia of Biological Chemistry - Vol - 3Document848 pagesEncyclopedia of Biological Chemistry - Vol - 3joshigauta100% (1)
- L.N - Ra&i - Unit - 5Document13 pagesL.N - Ra&i - Unit - 5FIGHTER WINGS AVIATION COLLEGENo ratings yet
- Sonar As A DSP ApplicationDocument14 pagesSonar As A DSP Applicationmagalhaespaulo565No ratings yet
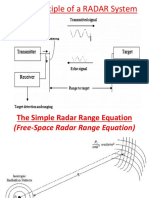
- Basic Radar Principles and General CharacteristicsDocument3 pagesBasic Radar Principles and General CharacteristicsankushbhasinNo ratings yet
- Designing Yagi AntennaDocument5 pagesDesigning Yagi AntennaAsghar FarhadiNo ratings yet
- Beamforming Basics in SONARDocument22 pagesBeamforming Basics in SONARabhishek100% (2)
- Mathews - Biochemistry (Mathews 3rd Ed) PDFDocument2,464 pagesMathews - Biochemistry (Mathews 3rd Ed) PDFMiguel González96% (24)
- SONARDocument13 pagesSONARSubir Maity100% (4)
- Assignment SONAR Experiment FullDocument12 pagesAssignment SONAR Experiment FullPykah Watif100% (1)
- DSP Project Sonar PresentationDocument27 pagesDSP Project Sonar PresentationThajid Ibna Rouf Uday100% (1)
- Radar Theory For Area Approach Radar ControllersDocument43 pagesRadar Theory For Area Approach Radar Controllersvyashemant83No ratings yet
- Ultrasonic Radar Research PaperDocument6 pagesUltrasonic Radar Research PaperAbhishek KushwahaNo ratings yet
- Radar ProjectDocument42 pagesRadar Projectgautam yadavNo ratings yet
- RadarDocument40 pagesRadarVS RakeshNo ratings yet
- Extracted Pages From RADAR SYSTEMS - Unit-1Document31 pagesExtracted Pages From RADAR SYSTEMS - Unit-1Mahendar ReddyNo ratings yet
- Sonar (Sound Navigation and Ranging) : Principle of An Active Sonar - Send and Return PingsDocument15 pagesSonar (Sound Navigation and Ranging) : Principle of An Active Sonar - Send and Return Pingsmonikajoon29No ratings yet
- General Facts About The Lidar TechniqueDocument29 pagesGeneral Facts About The Lidar TechniqueCirkuito100% (1)
- Obstacle Detection Using Ultrasonic SensorsDocument56 pagesObstacle Detection Using Ultrasonic Sensorsmymdb100% (3)
- Multi-Standard Receiver DesignDocument54 pagesMulti-Standard Receiver DesignWalid_Sassi_TunNo ratings yet
- Radar TheoryDocument51 pagesRadar TheoryMuhammad ShoaibNo ratings yet
- Satellite CommunicationDocument36 pagesSatellite Communicationتميم مسعودNo ratings yet
- Baeam Forming MatlabDocument32 pagesBaeam Forming Matlabvinayak341No ratings yet
- Microwave Remote Sensing: Rucha Joshi (M.Tech) Assistant Professor Geoinformatics Division University of PuneDocument52 pagesMicrowave Remote Sensing: Rucha Joshi (M.Tech) Assistant Professor Geoinformatics Division University of Puneरुचा जोशीNo ratings yet
- Radar ClassificationsDocument15 pagesRadar Classificationscnchinny778319No ratings yet
- Radar and Navigational AidsDocument1 pageRadar and Navigational AidsPatel Vivek0% (1)
- Radar Like NothingDocument33 pagesRadar Like NothingshubhamNo ratings yet
- Group Report Arduino Radar ShieldDocument12 pagesGroup Report Arduino Radar ShieldMustafa PehlivanNo ratings yet
- Microwave FMCW RadarDocument48 pagesMicrowave FMCW RadarPranabKumarGoswami100% (1)
- Lecture - 16 Side Scan Sonar and SBPDocument26 pagesLecture - 16 Side Scan Sonar and SBPTharina Nursalika Adhyati100% (1)
- Book-Data CommunicationDocument57 pagesBook-Data CommunicationBindu Devender MahajanNo ratings yet
- An Introduction To Radar Communication System: Quaid-e-Awam University of Engineering & Technology NawabshahDocument36 pagesAn Introduction To Radar Communication System: Quaid-e-Awam University of Engineering & Technology NawabshahHaseeb AhmedNo ratings yet
- ITC Hydrophones ApplicationsDocument1 pageITC Hydrophones Applicationskiran kumar kNo ratings yet
- Lidar Technology (Hard Copy)Document15 pagesLidar Technology (Hard Copy)Trupti ParidaNo ratings yet
- RADARDocument45 pagesRADARSummer KoNo ratings yet
- Ultrasonic Sound WavesDocument12 pagesUltrasonic Sound WavesAgnivesh Sharma100% (1)
- Teacher NotesDocument8 pagesTeacher Notesapi-410486717No ratings yet
- Homemade GPS ReceiverDocument24 pagesHomemade GPS ReceiverroyvalentikNo ratings yet
- GeoSwath Plus BrochureDocument16 pagesGeoSwath Plus BrochureAhmad Afandi100% (1)
- Amazing Growth in Military Radar Antenna TechnologyDocument39 pagesAmazing Growth in Military Radar Antenna Technologyagmnm1962100% (1)
- Side Scan Sonar and Sub-Bottom Profiler SurveyingDocument29 pagesSide Scan Sonar and Sub-Bottom Profiler SurveyingAlfian RomadhoniNo ratings yet
- Velocity of Sound in Liquid PDFDocument8 pagesVelocity of Sound in Liquid PDFDeniz Akoum100% (1)
- 2010 AsprsDocument88 pages2010 Asprstuckerman66No ratings yet
- Underwater Acoustic Positioning SystemDocument6 pagesUnderwater Acoustic Positioning SystemalphadingNo ratings yet
- RARDAR Material MainDocument96 pagesRARDAR Material MainShaikh ShaadNo ratings yet
- Radar .... 2016Document84 pagesRadar .... 2016kusuma100% (1)
- Sar Image FormationDocument15 pagesSar Image FormationMusyarofah HanafiNo ratings yet
- 0.8 IH (E) ) S 10 o 0.27t: 1 AE 0.8 V1+ A (0.2)Document19 pages0.8 IH (E) ) S 10 o 0.27t: 1 AE 0.8 V1+ A (0.2)Mounika GorikadiNo ratings yet
- Effective MagnetometerDocument17 pagesEffective MagnetometercartamenesNo ratings yet
- Sattelite CommunicationDocument31 pagesSattelite CommunicationSreekanth EnduruNo ratings yet
- Gps Imu Ekf NavigationDocument68 pagesGps Imu Ekf NavigationPhạm Ngọc HòaNo ratings yet
- Risat 1Document12 pagesRisat 1ramulu_492No ratings yet
- Insar Tutorial With NESTDocument100 pagesInsar Tutorial With NESTAdito MaulanaNo ratings yet
- Microwave Systems Part1Document100 pagesMicrowave Systems Part1John Brix BalisterosNo ratings yet
- Radar and Navigational AidsDocument44 pagesRadar and Navigational AidsRajesh Natarajan100% (1)
- Active Phased Array RadarDocument59 pagesActive Phased Array Radarravi kumarNo ratings yet
- Microcontroller Based Missile Detection and Destroying 8154 Rv8KK7qDocument21 pagesMicrocontroller Based Missile Detection and Destroying 8154 Rv8KK7qThor OdinsonNo ratings yet
- 634320547467133544Document18 pages634320547467133544Uday Kumar ReddyNo ratings yet
- Sonar: - Swapnil Hole (17) - Akshay Bramhane (18) - Amey Dandge (19) - Kshitij S. Dasture (20) Prof.P.A.PATHADEDocument30 pagesSonar: - Swapnil Hole (17) - Akshay Bramhane (18) - Amey Dandge (19) - Kshitij S. Dasture (20) Prof.P.A.PATHADEChinmay ApasangiNo ratings yet
- Term Paper Modern Physics and Electronics PHY112: Topic: SONARDocument24 pagesTerm Paper Modern Physics and Electronics PHY112: Topic: SONARprateek154No ratings yet
- SonarDocument33 pagesSonarFelipe CardosoNo ratings yet
- Echo SounderDocument13 pagesEcho SounderSanal RajNo ratings yet
- SonarDocument3 pagesSonarJAIVISHNU MNo ratings yet
- Genoenergy Particle Theory - by AMIT JOSHIDocument21 pagesGenoenergy Particle Theory - by AMIT JOSHIjoshigautaNo ratings yet
- Principles of Management (Ece, Me, Ce, Cse, Ee) 3rd Year (Sumit Joshi) Set-1Document3 pagesPrinciples of Management (Ece, Me, Ce, Cse, Ee) 3rd Year (Sumit Joshi) Set-1joshigautaNo ratings yet
- Encyclopedia of Biological Chemistry - Vol - 4Document503 pagesEncyclopedia of Biological Chemistry - Vol - 4joshigauta100% (1)
- Techniques in Cell Biology Manual New1Document227 pagesTechniques in Cell Biology Manual New1joshigautaNo ratings yet
- Medicinal Chemistry and Drug Discovery Burger S 6ed Vol5Document1,127 pagesMedicinal Chemistry and Drug Discovery Burger S 6ed Vol5Ama Fremps100% (2)
- Vol 6 - Nervous System AgentsDocument1,080 pagesVol 6 - Nervous System Agentsjoshigauta100% (3)
- Burgers Medicinal Chemistry and Drug Discovery 3Document885 pagesBurgers Medicinal Chemistry and Drug Discovery 3giselesilvestreNo ratings yet
- BURGER'S MEDICINAL CHEMISTRY AND DRUG DISCOVERY Volume 2 PDFDocument817 pagesBURGER'S MEDICINAL CHEMISTRY AND DRUG DISCOVERY Volume 2 PDFnoname1919193% (14)
- Vol 4 - Autocoids Diagnostics - and Drugs From New BiologyDocument716 pagesVol 4 - Autocoids Diagnostics - and Drugs From New Biologyjoshigauta50% (2)
- Drug Discovery Strategies and Methods 2004 - Makriyannis & BiegelDocument338 pagesDrug Discovery Strategies and Methods 2004 - Makriyannis & Biegeljoshigauta100% (1)
- Drug Targeting Organ-Specific StrategiesDocument406 pagesDrug Targeting Organ-Specific Strategiesjoshigauta100% (1)
- Major Cultivable Fish Species: Speaker: Dr. M.Das TrakrooDocument42 pagesMajor Cultivable Fish Species: Speaker: Dr. M.Das TrakroojoshigautaNo ratings yet
- Water Conditions: Solute Total Dissolved Solids Salinity Freshwater Brackish Water Estuaries SeawaterDocument4 pagesWater Conditions: Solute Total Dissolved Solids Salinity Freshwater Brackish Water Estuaries SeawaterjoshigautaNo ratings yet
- Captive Breeding and Growout of Golden Mahseer: Dr. Debajit SarmaDocument30 pagesCaptive Breeding and Growout of Golden Mahseer: Dr. Debajit SarmajoshigautaNo ratings yet
- Site Selection, Planning and Layout of Fish FarmDocument18 pagesSite Selection, Planning and Layout of Fish FarmjoshigautaNo ratings yet
- DAN Inland EstuarineDocument28 pagesDAN Inland EstuarinejoshigautaNo ratings yet
- Cold Water HatcheryDocument71 pagesCold Water Hatcheryjoshigauta100% (1)
- Oncorhynchus Mykiss) : Dr. N.N.Pandey (SR - Scientist, Aquaculture)Document40 pagesOncorhynchus Mykiss) : Dr. N.N.Pandey (SR - Scientist, Aquaculture)joshigautaNo ratings yet
- PCO OceanographyDocument13 pagesPCO Oceanographyjoshigauta100% (1)
- Induced Breeding in CarpsDocument100 pagesInduced Breeding in CarpsjoshigautaNo ratings yet
- Brood Care and Seed Production of Murrels: (R. N. Ram)Document64 pagesBrood Care and Seed Production of Murrels: (R. N. Ram)joshigautaNo ratings yet
- Embryonic: Larval Development in CarpsDocument11 pagesEmbryonic: Larval Development in CarpsjoshigautaNo ratings yet
- Scenario of Indian Aquaculture and FisheriesDocument16 pagesScenario of Indian Aquaculture and FisheriesjoshigautaNo ratings yet
- Seed Production of C. BatrachusDocument25 pagesSeed Production of C. BatrachusjoshigautaNo ratings yet
- NBFGRDocument33 pagesNBFGRjoshigautaNo ratings yet
- UHN - Careers at UHN - Job Application PDFDocument4 pagesUHN - Careers at UHN - Job Application PDFKARTHIKEYAN ARTISTNo ratings yet
- Cable Incendio 2X18 Awg S/P: UL1424FPLRDocument1 pageCable Incendio 2X18 Awg S/P: UL1424FPLR04143510504gallucciNo ratings yet
- BOMDocument1 pageBOMHytech Pvt. Ltd.No ratings yet
- Minerals Potential - Minerals Law of Lao PDRDocument44 pagesMinerals Potential - Minerals Law of Lao PDRkhamsone pengmanivongNo ratings yet
- Final Broucher 11-4 NewDocument3 pagesFinal Broucher 11-4 Newmilan07No ratings yet
- Succession DigestDocument407 pagesSuccession DigestToni Gabrielle Ang EspinaNo ratings yet
- Buyer Decision ProcessDocument3 pagesBuyer Decision ProcesswahirumaisaNo ratings yet
- SAP S/4HANA Supply Chain For Transportation Management 1809Document73 pagesSAP S/4HANA Supply Chain For Transportation Management 1809trishqNo ratings yet
- Doe School PlanDocument16 pagesDoe School PlanHNNNo ratings yet
- Carbon Dioxide Portable Storage UnitsDocument2 pagesCarbon Dioxide Portable Storage UnitsDiego AnayaNo ratings yet
- Full Name: Work Experience Career SynopsisDocument2 pagesFull Name: Work Experience Career SynopsisYelchuri Kumar PhanindraNo ratings yet
- OSINTDocument49 pagesOSINTMARCUS VINICIUSNo ratings yet
- Adaptive Multi RateDocument16 pagesAdaptive Multi RateRogelio HernandezNo ratings yet
- Homeland Security Thesis StatementDocument8 pagesHomeland Security Thesis Statementdwtcn1jq100% (2)
- Licom AlphaCamDocument27 pagesLicom AlphaCamdrx11100% (1)
- Efficient Securities MarketDocument19 pagesEfficient Securities MarketAnnisa MuktiNo ratings yet
- KickStart 19Document2 pagesKickStart 19Venu GopalNo ratings yet
- Chap 6-Supply, Demand & Government PoliciesDocument30 pagesChap 6-Supply, Demand & Government PoliciesKhánh AnNo ratings yet
- A Hybrid Intrution Detection Approach Based On Deep LearningDocument16 pagesA Hybrid Intrution Detection Approach Based On Deep LearningVictor KingbuilderNo ratings yet
- Norway Joint Venture Audit GuidelinesDocument31 pagesNorway Joint Venture Audit GuidelinesPatekJoaquinNo ratings yet
- Essentials of Marketing Research 4th Edition Hair Test Bank DownloadDocument22 pagesEssentials of Marketing Research 4th Edition Hair Test Bank Downloademmanuelmabelnjt7nn100% (35)
- Gyrator - Wikipedia PDFDocument44 pagesGyrator - Wikipedia PDFRishabh MishraNo ratings yet
- Service Quality, Customer Satisfaction, and Behavioral Intentions in Fast-Food RestaurantsDocument19 pagesService Quality, Customer Satisfaction, and Behavioral Intentions in Fast-Food RestaurantsFelisitas AgnesNo ratings yet
- Accounting ResearchDocument6 pagesAccounting ResearchAnne PanghulanNo ratings yet
- Hotel Administration and Management Network - AbstractDocument3 pagesHotel Administration and Management Network - AbstractMehadi Hasan RoxyNo ratings yet
- Tri 21 DMP 002Document3 pagesTri 21 DMP 002adi sihombingNo ratings yet
- Accounting Q&ADocument6 pagesAccounting Q&AIftikharNo ratings yet
- SDL 11Document14 pagesSDL 11Sharmila BalaNo ratings yet
- Training LV PanelDocument108 pagesTraining LV PanelruslanNo ratings yet
- Indian Bank Vs Maharashtra State Cooperative Marke0827s980450COM441873Document4 pagesIndian Bank Vs Maharashtra State Cooperative Marke0827s980450COM441873Bhuvneshwari RathoreNo ratings yet