Download as pdf or txt
You might also like
- Harmonic Oscillator and Rigid RotorDocument14 pagesHarmonic Oscillator and Rigid RotorJisu RyuNo ratings yet
- Final Report Buck ConverterDocument30 pagesFinal Report Buck Converter015Maulana Malik IbrahimNo ratings yet
- The Ancient and Honourable Art of ShimmingDocument19 pagesThe Ancient and Honourable Art of ShimmingAlex ZhouNo ratings yet
- Structural Dynamics by Finite ElementsDocument308 pagesStructural Dynamics by Finite ElementsLuis Ortiz71% (7)
- Practice Final ExamDocument7 pagesPractice Final ExamAdrianNo ratings yet
- Things To Know For The Physics GRE: Daniel Beller October 28, 2009Document20 pagesThings To Know For The Physics GRE: Daniel Beller October 28, 2009Arif SolmazNo ratings yet
- Induction MotorDocument65 pagesInduction MotorAnthony ZambranoNo ratings yet
- Motion 1 DDocument11 pagesMotion 1 Damit meelNo ratings yet
- Chapter 2: Kinematics of Particles: Constrained MotionDocument3 pagesChapter 2: Kinematics of Particles: Constrained MotionRicardo TapiaNo ratings yet
- FAL (2021-22) PHY1010 ETH AP2021222000083 Reference Material I 04-Aug-2021 Problems Lec 1Document27 pagesFAL (2021-22) PHY1010 ETH AP2021222000083 Reference Material I 04-Aug-2021 Problems Lec 1tejas paiNo ratings yet
- One-Dimensional Kinematics: Physics 1401 Formula Sheet - Exam 3Document7 pagesOne-Dimensional Kinematics: Physics 1401 Formula Sheet - Exam 3Mia RismaliaNo ratings yet
- PHYS 101 - General Physics-I, Final ExamDocument8 pagesPHYS 101 - General Physics-I, Final ExamhuuuzenNo ratings yet
- Two Machine System Pu ModelDocument14 pagesTwo Machine System Pu ModelDinesh ShettyNo ratings yet
- Chapter 9. Transmission LinesDocument28 pagesChapter 9. Transmission Lines채정우No ratings yet
- Chapter 9Document28 pagesChapter 9wlsh2001No ratings yet
- 2425 FormulasDocument2 pages2425 FormulasSandeep K. JaiswalNo ratings yet
- Atoms in Strong Laser Fields: C. Figueira de Morisson FariaDocument18 pagesAtoms in Strong Laser Fields: C. Figueira de Morisson FariaRoy VeseyNo ratings yet
- Formular IDocument3 pagesFormular IJo PopscNo ratings yet
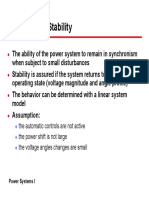
- Steady State Stability PDFDocument12 pagesSteady State Stability PDFAvijit AdhikaryNo ratings yet
- BEE4223 Power Electronics & Drives SystemsDocument40 pagesBEE4223 Power Electronics & Drives Systemsmalathynarayani100% (1)
- Lab Report #2: KeywordsDocument8 pagesLab Report #2: KeywordsIjaz AhmadNo ratings yet
- 2425 FormulasDocument2 pages2425 FormulassonuNo ratings yet
- Vibrations: and Their Design Requires Consideration To Oscillatory BehaviorDocument25 pagesVibrations: and Their Design Requires Consideration To Oscillatory BehaviorManashaaNo ratings yet
- Torque - Slip Characteristic of A Three - Phase Induction MachineDocument28 pagesTorque - Slip Characteristic of A Three - Phase Induction MachineAli AltahirNo ratings yet
- Harmonic Oscillation, Komang SuardikaDocument125 pagesHarmonic Oscillation, Komang SuardikaKomang SuardikaNo ratings yet
- Formulae SheetDocument4 pagesFormulae SheetOMARNo ratings yet
- Dynamics of GyroscopesDocument38 pagesDynamics of GyroscopesLeo KutsNo ratings yet
- SHM SummaryDocument3 pagesSHM SummaryalifikmalNo ratings yet
- Physics Cheat Sheet 1 Units 5 More Motion FormulasDocument1 pagePhysics Cheat Sheet 1 Units 5 More Motion FormulasMuhammad Pathan AbroNo ratings yet
- Chapter 4 Multiple-Degree-of-Freedom (MDOF) Systems ExamplesDocument17 pagesChapter 4 Multiple-Degree-of-Freedom (MDOF) Systems ExamplesprashanthNo ratings yet
- Aircraft Structures1 Lecture5Document35 pagesAircraft Structures1 Lecture5Hoang NguyenNo ratings yet
- Đ Án Rơ Le DuyDocument44 pagesĐ Án Rơ Le Duynam phuongNo ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- Formulas Test Phy2053 StudentDocument4 pagesFormulas Test Phy2053 Studentwidmael alcenatNo ratings yet
- CH 10Document70 pagesCH 10hhhamad5555No ratings yet
- HW Solve 04Document4 pagesHW Solve 04elisaNo ratings yet
- Mathematics Revision of Formulae and Results: Surds Co-Ordinate GeometryDocument5 pagesMathematics Revision of Formulae and Results: Surds Co-Ordinate GeometryDarrenPurtillWrightNo ratings yet
- Formula SheetDocument5 pagesFormula SheetKevin YeNo ratings yet
- Slides6 Phy204Document41 pagesSlides6 Phy204SahilNo ratings yet
- AEP 3330 Final - Some EquationsDocument1 pageAEP 3330 Final - Some EquationsJesse ZhangNo ratings yet
- Ecor1048 Dyn Formula SheetDocument5 pagesEcor1048 Dyn Formula SheetthatoneafghanakhiNo ratings yet
- CLUTCHDocument6 pagesCLUTCHAboud MNo ratings yet
- Some Useful Formulae: A A A A A A + + + +Document3 pagesSome Useful Formulae: A A A A A A + + + +leichihouNo ratings yet
- Lecture 17Document21 pagesLecture 17narvan.m31No ratings yet
- Rotational NotesDocument12 pagesRotational Notesnivruttipatil44844No ratings yet
- MIT18 303F14 MidtermsolDocument3 pagesMIT18 303F14 MidtermsolParshwa ConsultancyNo ratings yet
- Ind Model D PDFDocument3 pagesInd Model D PDFHerb GassNo ratings yet
- CmechDocument10 pagesCmechdaskhagoNo ratings yet
- 3.7 Governing Equations and Boundary Conditions For P-Flow: 2.20 - Marine Hydrodynamics, Fall 2014Document28 pages3.7 Governing Equations and Boundary Conditions For P-Flow: 2.20 - Marine Hydrodynamics, Fall 2014Felix FisherNo ratings yet
- Mechanics Lectures 20to29Document82 pagesMechanics Lectures 20to29sunny agarwalNo ratings yet
- Half Wave Rectifier Circuit TheoryDocument13 pagesHalf Wave Rectifier Circuit TheoryKJMIndiaNo ratings yet
- Quantum Mechanics and The Hydrogen AtomDocument19 pagesQuantum Mechanics and The Hydrogen AtomIoan Paul PârleaNo ratings yet
- Electric Field of Continuous Charge Distributions. Electric FDocument21 pagesElectric Field of Continuous Charge Distributions. Electric FDave BlessedNo ratings yet
- Synchronous Machine Pu ModelDocument13 pagesSynchronous Machine Pu ModelDinesh ShettyNo ratings yet
- CH 2Document44 pagesCH 2tiendungqp264No ratings yet
- Lab 5Document8 pagesLab 5Smshihab ShararNo ratings yet
- Asenkron - Makineler 9. HAFTADocument49 pagesAsenkron - Makineler 9. HAFTAİldem SemaNo ratings yet
- Chap8 (Ztransform)Document11 pagesChap8 (Ztransform)김민성No ratings yet
- Calculus 2 SummaryDocument2 pagesCalculus 2 Summarydukefvr41No ratings yet
- Chapter2 3Document9 pagesChapter2 3Brhane W YgzawNo ratings yet
- ST6 L7 Vibration Control - Vibration Absorber Chapter 09Document21 pagesST6 L7 Vibration Control - Vibration Absorber Chapter 09Sherlock HolmesNo ratings yet
- Calculus Additional Maths 0606 PDFDocument65 pagesCalculus Additional Maths 0606 PDFsanthiNo ratings yet
- Kinetic and Potential Energy Worksheet NameDocument3 pagesKinetic and Potential Energy Worksheet NameNgwee Lambang PacateNo ratings yet
- Calculation of Smoke Movement in Building in Case of Fire: Takayuki Matsushita, Hiroshi Fukai, and Toshio TeraiDocument10 pagesCalculation of Smoke Movement in Building in Case of Fire: Takayuki Matsushita, Hiroshi Fukai, and Toshio Teraiefmartin21No ratings yet
- 2021 JMRT EC RefinementDocument13 pages2021 JMRT EC Refinement김문조No ratings yet
- Volume - Prisms and Cylinders: Find the volume of each shape. Round your answer to two decimal places. (use π = 3.14)Document2 pagesVolume - Prisms and Cylinders: Find the volume of each shape. Round your answer to two decimal places. (use π = 3.14)inoubliable Gold100% (1)
- Kew Snap: Instruction ManualDocument24 pagesKew Snap: Instruction ManualClaudio CostaNo ratings yet
- Q13&14Document2 pagesQ13&14Duaa GadoraaNo ratings yet
- Ee6402 Scad MSM PDFDocument111 pagesEe6402 Scad MSM PDFJecintha CarolinNo ratings yet
- Setting Calculation - Protection & Coordination - INITIALDocument4 pagesSetting Calculation - Protection & Coordination - INITIALChRis dE LeonNo ratings yet
- Auto-Reclosing: Network Protection & Automation GuideDocument16 pagesAuto-Reclosing: Network Protection & Automation GuideShailesh ChettyNo ratings yet
- BEC198 Questions. Differential EquationsDocument5 pagesBEC198 Questions. Differential EquationsMary Grace VelitarioNo ratings yet
- NGR Sizing and Selection As Per IEEEDocument47 pagesNGR Sizing and Selection As Per IEEEutshab.ghosh2023No ratings yet
- New Lecture 5Document38 pagesNew Lecture 5Khulud K. HabanjarNo ratings yet
- Nonlinear Wave ShapingDocument17 pagesNonlinear Wave ShapingapnraoNo ratings yet
- 5.2.2h Surface Area of PrismsDocument16 pages5.2.2h Surface Area of Prismsdr.taim.09No ratings yet
- RAD EPS 45-80 High-Voltage Generator: Product SpecificationDocument16 pagesRAD EPS 45-80 High-Voltage Generator: Product Specificationmohamed hanouacheNo ratings yet
- Light Emitting Diodes (Leds) : FunctionDocument5 pagesLight Emitting Diodes (Leds) : FunctionBharath RajNo ratings yet
- Physics: Moyin SirDocument16 pagesPhysics: Moyin Sirmoyin_sirNo ratings yet
- Planck Time - WikipediaDocument2 pagesPlanck Time - WikipediaGowtham SpNo ratings yet
- Chapter 2 SolutionsDocument28 pagesChapter 2 SolutionsOmy BiryaniNo ratings yet
- Modern Physics SolutionDocument28 pagesModern Physics Solutionskadogg2250% (2)
- Reference Answers 1 H&HDocument3 pagesReference Answers 1 H&HSam lauNo ratings yet
- Chapter 4Document6 pagesChapter 4Tanvi IsraniNo ratings yet
- Ihw 1Document10 pagesIhw 1LogoNo ratings yet
- The Feynman Path Integral Approach To Atomic Interferometry. A TutorialDocument30 pagesThe Feynman Path Integral Approach To Atomic Interferometry. A TutorialAleJo BernateNo ratings yet
- Static Pressure Calculator r3Document3 pagesStatic Pressure Calculator r3arshi_yusufNo ratings yet
- En d2hwDocument11 pagesEn d2hwOchitt DoankNo ratings yet