Download as pdf or txt
You might also like
- Nonlinear Control Problem Set1Document3 pagesNonlinear Control Problem Set1tetrixNo ratings yet
- C++ Course OutlineDocument12 pagesC++ Course OutlineGauravNo ratings yet
- Multiagent RolloutDocument25 pagesMultiagent RolloutMartina MerolaNo ratings yet
- Field Exam - ControlsDocument1 pageField Exam - ControlsVigneshRamakrishnanNo ratings yet
- Namic ProgrammingDocument18 pagesNamic ProgrammingBogdan ManeaNo ratings yet
- T6: Introduction To Optimal Control: Gabriel Oliver CodinaDocument3 pagesT6: Introduction To Optimal Control: Gabriel Oliver CodinaMona AliNo ratings yet
- Optimal Control ExercisesDocument79 pagesOptimal Control ExercisesAlejandroHerreraGurideChile100% (2)
- 4F3 - Predictive ControlDocument27 pages4F3 - Predictive ControlsamandondonNo ratings yet
- Selected ProblemsDocument11 pagesSelected Problemsasanithanair35No ratings yet
- Deterministic Continuous Time Optimal Control and The Hamilton-Jacobi-Bellman EquationDocument7 pagesDeterministic Continuous Time Optimal Control and The Hamilton-Jacobi-Bellman EquationAbdesselem BoulkrouneNo ratings yet
- L1 State Space AnalysisDocument34 pagesL1 State Space AnalysisRudra MishraNo ratings yet
- Optimal Jan24 Assignment 3Document4 pagesOptimal Jan24 Assignment 3Harish MokashiNo ratings yet
- Estimation 2 PDFDocument44 pagesEstimation 2 PDFsamina butoolNo ratings yet
- RL and ObC Lecture 2Document20 pagesRL and ObC Lecture 2Erdem ŞimşekNo ratings yet
- Dynamic Programming and Optimal Control: Third Edition Dimitri P. BertsekasDocument54 pagesDynamic Programming and Optimal Control: Third Edition Dimitri P. BertsekasRachit ShahNo ratings yet
- Controllability ObservDocument31 pagesControllability Observanuj kumarNo ratings yet
- Handout 1 PDFDocument48 pagesHandout 1 PDFRudi UswrmnNo ratings yet
- Dynamic Programming and Optimal Control, Volumes I Solution SelectedDocument30 pagesDynamic Programming and Optimal Control, Volumes I Solution SelectedXin ZhaoNo ratings yet
- Inno2024 EMT4203 CONTROL II NOTES R6Document9 pagesInno2024 EMT4203 CONTROL II NOTES R6kabuej3No ratings yet
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocument4 pages16.323 Principles of Optimal Control: Mit OpencoursewareSantosh KiranNo ratings yet
- L31 - COntrollability, Observability and Stability of Discrete Time SystemsDocument6 pagesL31 - COntrollability, Observability and Stability of Discrete Time SystemsKhi VuNo ratings yet
- 5.3 The Wave Equation and Staggered Leapfrog: C 2006 Gilbert StrangDocument11 pages5.3 The Wave Equation and Staggered Leapfrog: C 2006 Gilbert StrangEfstathios SiampisNo ratings yet
- High Gain Observer: Consider The Following SystemDocument21 pagesHigh Gain Observer: Consider The Following Systemtidjani73No ratings yet
- Hw01sol PDFDocument4 pagesHw01sol PDFDao YanNo ratings yet
- Sol Mock ExamDocument10 pagesSol Mock ExamAinur LatipovNo ratings yet
- FALLSEM2013-14 CP1806 30-Oct-2013 RM01 II OptimalControl UploadedDocument10 pagesFALLSEM2013-14 CP1806 30-Oct-2013 RM01 II OptimalControl UploadedRajat Kumar SinghNo ratings yet
- Assignment 1 (ELE8306 - 21)Document5 pagesAssignment 1 (ELE8306 - 21)umarsaboNo ratings yet
- Dynamic Programming and Linear Quadratic (LQ) Control (Discrete-Time and Continuous Time Cases)Document53 pagesDynamic Programming and Linear Quadratic (LQ) Control (Discrete-Time and Continuous Time Cases)balkyderNo ratings yet
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocument4 pages16.323 Principles of Optimal Control: Mit OpencoursewareMohand Achour TouatNo ratings yet
- The Wave Equation On RDocument12 pagesThe Wave Equation On RElohim Ortiz CaballeroNo ratings yet
- Ee263 Ps1 SolDocument11 pagesEe263 Ps1 SolMorokot AngelaNo ratings yet
- HW 01 SolDocument4 pagesHW 01 SolDao YanNo ratings yet
- 5 - HJBDocument12 pages5 - HJBBogdan ManeaNo ratings yet
- Examples 6Document3 pagesExamples 6emma.ubekuNo ratings yet
- 4.3 Application of DP To The Energy Management Problem in Hevs 45Document1 page4.3 Application of DP To The Energy Management Problem in Hevs 45Soumyabrata BarikNo ratings yet
- ECE311 - Dynamic Systems and Control Linearization of Nonlinear SystemsDocument5 pagesECE311 - Dynamic Systems and Control Linearization of Nonlinear Systemsnirmal_inboxNo ratings yet
- Transfer Function: FOR Discrete Lti SystemDocument38 pagesTransfer Function: FOR Discrete Lti SystemKrishn LimbachiyaNo ratings yet
- Exsheet 1Document4 pagesExsheet 1pobisas812No ratings yet
- Summer 2Document29 pagesSummer 2jimwaoNo ratings yet
- 1 Kalman Filter Introduction: 1.1 Explanation of Equations (1-3) and (1-4)Document7 pages1 Kalman Filter Introduction: 1.1 Explanation of Equations (1-3) and (1-4)Frans Galuh Candra PNo ratings yet
- Advanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Document3 pagesAdvanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Anonymous tjckgoWNeNo ratings yet
- ECE 551 Lecture 4Document10 pagesECE 551 Lecture 4adambose1990No ratings yet
- State SpaceDocument48 pagesState SpacekanchiNo ratings yet
- Bern RicDocument3 pagesBern RicJL1206No ratings yet
- Discrete Time Control Systems Unit 5Document23 pagesDiscrete Time Control Systems Unit 5kishan guptaNo ratings yet
- DPOCexam2017 Solution BBDocument20 pagesDPOCexam2017 Solution BBAbdesselem BoulkrouneNo ratings yet
- Lec19 - Linear Quadratic RegulatorDocument7 pagesLec19 - Linear Quadratic RegulatorPilwon HurNo ratings yet
- 2011-05 Sisomimo Design ExamplesDocument14 pages2011-05 Sisomimo Design ExamplesArundhati ChaudhariNo ratings yet
- Different Types of Systems: TF X (TF)Document20 pagesDifferent Types of Systems: TF X (TF)ADSH QWERTYNo ratings yet
- Systems of Surveillance of Dynamic ProcessesDocument13 pagesSystems of Surveillance of Dynamic ProcessesnickNo ratings yet
- Lecture06 Handout PDFDocument7 pagesLecture06 Handout PDFBotlhe SomolekaeNo ratings yet
- Elements of Optimal Control Theory Pontryagin's Maximum PrincipleDocument11 pagesElements of Optimal Control Theory Pontryagin's Maximum PrinciplefaskillerNo ratings yet
- Lecture Summary: Markov Jump Linear Systems: Vijay Gupta and Richard M. MurrayDocument3 pagesLecture Summary: Markov Jump Linear Systems: Vijay Gupta and Richard M. MurrayParfumerie Actu'ElleNo ratings yet
- 0 Tlemcen Mio ContribDocument49 pages0 Tlemcen Mio Contribtesfayetlh_400418456No ratings yet
- CH 4Document26 pagesCH 4Keneni AlemayehuNo ratings yet
- 0 Tlemcen Mio Contrib PDFDocument48 pages0 Tlemcen Mio Contrib PDFManvir Singh GillNo ratings yet
- Kalman Filter For Vision Tracking: Erik Cuevas1,2, Daniel Zaldivar1,2 and Raul Rojas1 10th August 2005Document18 pagesKalman Filter For Vision Tracking: Erik Cuevas1,2, Daniel Zaldivar1,2 and Raul Rojas1 10th August 2005marian goleaNo ratings yet
- Topic Two: II. Stationarity and ARMA ModellingDocument24 pagesTopic Two: II. Stationarity and ARMA ModellingCollins MuseraNo ratings yet
- Control Principles For Engineered Sysrems 5SMC0Document41 pagesControl Principles For Engineered Sysrems 5SMC0JhonNo ratings yet
- SF2521NPDE hmwk1-2Document5 pagesSF2521NPDE hmwk1-2BlooD LOVERNo ratings yet
- DBMS Lab FileDocument30 pagesDBMS Lab FileJim AbwaoNo ratings yet
- Unix Shell Scripting Reference Cheat Crib SheetDocument4 pagesUnix Shell Scripting Reference Cheat Crib SheetRajasekhar CherukuriNo ratings yet
- Programming in C & C++Document121 pagesProgramming in C & C++shailesh_khandelwalNo ratings yet
- SG - bigo.Hellotalk:Service 2018-05-13Document1 pageSG - bigo.Hellotalk:Service 2018-05-13yugita kirantiNo ratings yet
- Serial Adder VHDL CodeDocument1 pageSerial Adder VHDL CodeRohith RajNo ratings yet
- Common To CSE, ITDocument1 pageCommon To CSE, ITSai RamNo ratings yet
- Compiler Lab VivaDocument6 pagesCompiler Lab VivaGaurav SharmaNo ratings yet
- Case Study MysqlDocument3 pagesCase Study MysqlAsadNo ratings yet
- Peoplesoft - Component Interface: Prasad Raju. GDocument30 pagesPeoplesoft - Component Interface: Prasad Raju. Gjanardhanreddyp123No ratings yet
- SIAM Workshop Introduction To Python For Mathematicians and ScientistsDocument83 pagesSIAM Workshop Introduction To Python For Mathematicians and ScientistsDiego Canales AguileraNo ratings yet
- 4.0: Literature Review: Round Robin CPU Scheduling AlgorithmDocument9 pages4.0: Literature Review: Round Robin CPU Scheduling AlgorithmVaishnavi PatilNo ratings yet
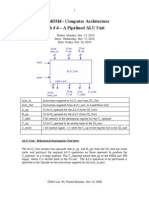
- ECE 4DM4 - Computer Architecture Lab # 4 - A Pipelined ALU UnitDocument8 pagesECE 4DM4 - Computer Architecture Lab # 4 - A Pipelined ALU UnitsantoshmphilNo ratings yet
- Data Structures and AlgorithmsDocument3 pagesData Structures and AlgorithmsLaen OnredorNo ratings yet
- 11 Micropython 1.18-DocsDocument501 pages11 Micropython 1.18-DocsEpic ArrowNo ratings yet
- C++ Unit 2Document69 pagesC++ Unit 2OrlinNo ratings yet
- Computer Organization and Architecture Themes and Variations 1st Edition Alan Clements Solutions ManualDocument18 pagesComputer Organization and Architecture Themes and Variations 1st Edition Alan Clements Solutions Manualselenadanielfbit87100% (38)
- A New Sorting Algorithm: Kiran Kumar Sundararajan, Soubhik ChakrabortyDocument5 pagesA New Sorting Algorithm: Kiran Kumar Sundararajan, Soubhik ChakrabortyasddsdsaNo ratings yet
- Cours D'optimisationDocument159 pagesCours D'optimisationAdailton FreitasNo ratings yet
- CIT - 206 - Lecture - 1 - Introduction To Event Driven ProgrammingDocument17 pagesCIT - 206 - Lecture - 1 - Introduction To Event Driven ProgrammingThobius JosephNo ratings yet
- Assignment 1Document8 pagesAssignment 1Saksham SinghNo ratings yet
- Developing Asp Net Core MVC Web Applications m20486 m20486 PDFDocument6 pagesDeveloping Asp Net Core MVC Web Applications m20486 m20486 PDFJose Augusto Tejada BarrantesNo ratings yet
- Res Expansion Candidate Submittal TemplateDocument3 pagesRes Expansion Candidate Submittal TemplateSashi RaoNo ratings yet
- 2013MayBuild A Fortran Project Through CMakeDocument2 pages2013MayBuild A Fortran Project Through CMakephilo10No ratings yet
- Harbour Beginners' GuideDocument24 pagesHarbour Beginners' Guidejosé_alencar_57No ratings yet
- Chapter 4Document57 pagesChapter 4Itumeleng MokhachaneNo ratings yet
- "%S:%D %D - " "" "Request Method:"Document8 pages"%S:%D %D - " "" "Request Method:"Jean PierreNo ratings yet
- W.A.P To Print The ASCII Value of The Character Entered by The UserDocument24 pagesW.A.P To Print The ASCII Value of The Character Entered by The UserMadhav LohchabNo ratings yet
- Assignment of ADVANCED JAVA: Title:-RmiDocument7 pagesAssignment of ADVANCED JAVA: Title:-RmiTizazu SelemonNo ratings yet
- Selecting and Navigating Nodes Using XpathDocument28 pagesSelecting and Navigating Nodes Using Xpathjunk emailNo ratings yet