Download as doc, pdf, or txt
You might also like
- Zadanie EP2Document2 pagesZadanie EP2simonkral45No ratings yet
- 6 Ucebnica P-HdiagramDocument35 pages6 Ucebnica P-HdiagramSlovenský zväz pre chladiacu a klimatizačnú techniku71% (7)
- ZIM Zapocet3Document5 pagesZIM Zapocet3Влад ФутракNo ratings yet
- Teória Úvod Do Riadenia ProcesovDocument102 pagesTeória Úvod Do Riadenia ProcesovCrazy NickNo ratings yet
- Zadanie Č. 3 - TMDocument10 pagesZadanie Č. 3 - TMNeonila PoliakNo ratings yet
- Priklad 21Document5 pagesPriklad 21Владислав ШикулаNo ratings yet
- Technická Dokumentácia - Textová ČasťDocument15 pagesTechnická Dokumentácia - Textová ČasťAndrej OremušNo ratings yet
- Antal Termomechanika Zbierka PríkladovDocument70 pagesAntal Termomechanika Zbierka Príkladovslamienka100% (1)
- CHE KonzultacieDocument2 pagesCHE KonzultacieEmaMeňhárováNo ratings yet
- 4r. - Meranie Na AODocument4 pages4r. - Meranie Na AOdonkajubNo ratings yet
- Fyzikalna Chemia Riesene Priklady I. Cast P. MilesDocument106 pagesFyzikalna Chemia Riesene Priklady I. Cast P. MilesKristína ŠkrovanováNo ratings yet
- 3-9 - Meranie Kapacity A Indukcie Rezonančnou MetódouDocument7 pages3-9 - Meranie Kapacity A Indukcie Rezonančnou MetódouKoulas ShowNo ratings yet
- Návrh Pružnej Spojky (SjF-STU-K2)Document8 pagesNávrh Pružnej Spojky (SjF-STU-K2)slamienkaNo ratings yet
- Termo-PC2-IN51-2020-2 ProblemaDocument1 pageTermo-PC2-IN51-2020-2 ProblemaStefanieNo ratings yet
- PIT 0317 Metóda GLDocument3 pagesPIT 0317 Metóda GLJakub GráčikNo ratings yet
- MU SZ: Lineárna Alg EbraDocument199 pagesMU SZ: Lineárna Alg EbraVicomte MartinoNo ratings yet
- Bristol OrionDocument4 pagesBristol OrionВладислав ШикулаNo ratings yet
- CelokDocument81 pagesCelokJanka VargovaNo ratings yet
- OGRADADocument7 pagesOGRADAEmir MesanovicNo ratings yet
- Fyzika Protokol 1 (Oleksii Dvorianchuk)Document10 pagesFyzika Protokol 1 (Oleksii Dvorianchuk)Alex DvoryanchukNo ratings yet
- Centrometal Bojler UpatstvoDocument32 pagesCentrometal Bojler UpatstvoToni TalevskiNo ratings yet
- Ppi Prednáška č.6Document26 pagesPpi Prednáška č.6Stas KramarenkoNo ratings yet
- Priklady ObrabanieDocument40 pagesPriklady ObrabanieAndrej ChudýNo ratings yet
- Meranie Tiažového ZrýchleniaDocument5 pagesMeranie Tiažového ZrýchleniaPeter PríbeliNo ratings yet
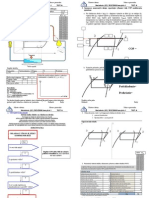
- I Sablona2009 R22Document2 pagesI Sablona2009 R22Slovenský zväz pre chladiacu a klimatizačnú technikuNo ratings yet
- MATEMATIKA 8.A Dĺžka Kružnice Obsah Kruhu Vzorce CvičeniaDocument3 pagesMATEMATIKA 8.A Dĺžka Kružnice Obsah Kruhu Vzorce Cvičenialasenka57No ratings yet
- Technicka DDocument15 pagesTechnicka DAndrej OremušNo ratings yet
- Vzor ProtokolDocument4 pagesVzor ProtokolDávid LakoštíkNo ratings yet
- Tvarnenie 1Document7 pagesTvarnenie 1Pavol TkáčNo ratings yet
- Olimpia PDFDocument13 pagesOlimpia PDFNo YesNo ratings yet
- Spravnost A ZlozitostDocument3 pagesSpravnost A Zlozitostmarkomarecek06No ratings yet
- 2.2 Meranie Kapacity V-A MetódouDocument4 pages2.2 Meranie Kapacity V-A Metódoutimotej.suvakNo ratings yet
- Príklady 1-4mmmDocument4 pagesPríklady 1-4mmmĽubor LamošNo ratings yet
- Návrh Remeňového PrevoduDocument16 pagesNávrh Remeňového PrevoduslamienkaNo ratings yet
- Mechatronika - Meranie TeplotyDocument6 pagesMechatronika - Meranie TeplotyadamNo ratings yet
- 8 CvičenieDocument21 pages8 CvičenieshcherbakovamariaNo ratings yet
- Halienka ELR Meranie02Document3 pagesHalienka ELR Meranie02halsam070906No ratings yet
- Termo Kinetika Rovnovaha PrikladyDocument2 pagesTermo Kinetika Rovnovaha PrikladyKaterina MeliškoNo ratings yet
- Lab Uloha MR KyvadloDocument5 pagesLab Uloha MR KyvadloKnivesWolvesNo ratings yet
- 05 - TeplotaDocument51 pages05 - TeplotamiadikradoslavNo ratings yet
- 58 - Riešenie Príkladov Na Molekulárnu FyzikuDocument2 pages58 - Riešenie Príkladov Na Molekulárnu FyzikuOmokoNo ratings yet
- MeraceDocument148 pagesMeracePeter ŠefarNo ratings yet
- Farkas Clanok MaS Opraveny PDFDocument15 pagesFarkas Clanok MaS Opraveny PDFfarkasgNo ratings yet
- Brava Quad CRT-D Typ DTBC2QQ Spec Sheet - SKDocument27 pagesBrava Quad CRT-D Typ DTBC2QQ Spec Sheet - SKAnkitNo ratings yet
- Trigonometriski FormuliDocument3 pagesTrigonometriski Formuliapi-276126767No ratings yet
- Goniometrické Funkcie 2Document2 pagesGoniometrické Funkcie 2Nika LikaNo ratings yet
- /Δl určte tuhosť použitej pružinyDocument1 page/Δl určte tuhosť použitej pružinyŠimon VojtkoNo ratings yet
- Elektromery A OdpocetDocument32 pagesElektromery A OdpocetJozef SovcikNo ratings yet
- Materiál K Počítaniu Pomocou Vzorca Pre TeploDocument3 pagesMateriál K Počítaniu Pomocou Vzorca Pre TeploHup ToNo ratings yet
- 3 Vseob Rov PriamkyDocument4 pages3 Vseob Rov PriamkyMiškaLeaVlčejováNo ratings yet
- Navod Na PouzitieDocument20 pagesNavod Na PouzitieOliver Ivan KuceraNo ratings yet
- V V V V V V ε: = = = 1991 cm 18 =110,61 cmDocument2 pagesV V V V V V ε: = = = 1991 cm 18 =110,61 cmВладислав ШикулаNo ratings yet
- LP Z LC 2, Polarimetria, Armand Majer, 07. 03. 2022Document7 pagesLP Z LC 2, Polarimetria, Armand Majer, 07. 03. 2022Armand MajerNo ratings yet
- PoissonDocument2 pagesPoissondemaximNo ratings yet
- KnihaBlaha 22006Document48 pagesKnihaBlaha 22006Slovenský zväz pre chladiacu a klimatizačnú technikuNo ratings yet
- F1 Premeny Jedn.Document1 pageF1 Premeny Jedn.Lina PhotosNo ratings yet
- Maturita Matematika - PríkladyDocument8 pagesMaturita Matematika - Príkladyremus100% (4)
- Navrh Obdlznikoveho Prierezu PostupDocument9 pagesNavrh Obdlznikoveho Prierezu PostupAnonymous gHtAw6MKNo ratings yet
- F64dkAri23 BodyDocument11 pagesF64dkAri23 BodyTomáš KubrickýNo ratings yet