Download as pdf or txt
You might also like
- 100 Questões Comentadas de PO PDFDocument31 pages100 Questões Comentadas de PO PDFMag NetoNo ratings yet
- Chevy Differentials: How to Rebuild the 10- and 12-BoltFrom EverandChevy Differentials: How to Rebuild the 10- and 12-BoltRating: 5 out of 5 stars5/5 (17)
- ISO 6520 Defects Overview PDFDocument27 pagesISO 6520 Defects Overview PDFalinor_tn80% (5)
- Losartan Drug StudyDocument1 pageLosartan Drug StudyWenalyn Grace Abella Llavan100% (3)
- Introduction To Spectroscopy Pavia 4th Solutions ManualDocument5 pagesIntroduction To Spectroscopy Pavia 4th Solutions Manualسیاہ پوش100% (1)
- Designer MilkDocument30 pagesDesigner MilkParashuram Shanigaram67% (6)
- VM EnginesDocument7 pagesVM EnginesraulNo ratings yet
- Legacy V Design Report: Varun Talathi, Ajinkya Belsare, Aditya Chivate, Abhilash ChopadeDocument8 pagesLegacy V Design Report: Varun Talathi, Ajinkya Belsare, Aditya Chivate, Abhilash ChopadeJuicYm mNo ratings yet
- 2009 DesignReport Michugan v2Document8 pages2009 DesignReport Michugan v2Midhun JoseNo ratings yet
- BAJA Final Design Report by Car#8 - Bangalore Institute of Technology - TEAM STRATOSDocument8 pagesBAJA Final Design Report by Car#8 - Bangalore Institute of Technology - TEAM STRATOSManish O100% (2)
- Abstract:: Design Report For Baja Saeindia 2018Document10 pagesAbstract:: Design Report For Baja Saeindia 2018AndhdNo ratings yet
- Design Analysis of The Chassis For The Go-KartDocument7 pagesDesign Analysis of The Chassis For The Go-KartGong68No ratings yet
- Baja Saeindia 2012 Design ReportDocument11 pagesBaja Saeindia 2012 Design ReportPriyesh SinghNo ratings yet
- Finite Element Analysis of Automobile ChassisDocument4 pagesFinite Element Analysis of Automobile ChassisGRD JournalsNo ratings yet
- Bike Chasis DesignDocument7 pagesBike Chasis Designparth sarthyNo ratings yet
- Research Paper Stage IDocument5 pagesResearch Paper Stage IPrakash KatdareNo ratings yet
- Modelling and Analysis of Heavy Vehicle Chassis Frame Made by Using Carbon Fiber and Composite Material: A Comparative Study.Document9 pagesModelling and Analysis of Heavy Vehicle Chassis Frame Made by Using Carbon Fiber and Composite Material: A Comparative Study.Bhimsen ShresthaNo ratings yet
- Modeling and Analysis of Car WheelDocument8 pagesModeling and Analysis of Car WheelAnonymous CUPykm6DZNo ratings yet
- Chassis Structural Design of Track Racing One Manned Formula CarDocument5 pagesChassis Structural Design of Track Racing One Manned Formula CarSyed MajeedNo ratings yet
- Sae Baja India 2010 Design Report - VAJRADocument8 pagesSae Baja India 2010 Design Report - VAJRAgobajasaeindia100% (3)
- 89 Team Demons CAEEvaluationReportDocument15 pages89 Team Demons CAEEvaluationReportAtharva SanglikarNo ratings yet
- IJERT Design and Analysis of SAE Supra CDocument10 pagesIJERT Design and Analysis of SAE Supra CDEEPAK S SEC 2020No ratings yet
- Journalsresaim Ijresm v3 I7 66Document6 pagesJournalsresaim Ijresm v3 I7 66Rodrigo bolaNo ratings yet
- Baja Design ReportDocument9 pagesBaja Design ReportAkhilNo ratings yet
- Kongunadu Conference PresentationDocument24 pagesKongunadu Conference Presentationranjith kumar EswaranNo ratings yet
- Ijaerv13n11 160Document6 pagesIjaerv13n11 160PrimaNo ratings yet
- Project Report On ATV Prototype BAJA SAE INDIA PDFDocument60 pagesProject Report On ATV Prototype BAJA SAE INDIA PDFPavan Kumar Bittu100% (1)
- Project Report On ATV Prototype BAJA SAE INDIADocument60 pagesProject Report On ATV Prototype BAJA SAE INDIAsanket50% (6)
- Detailed Specifications: Roll CageDocument6 pagesDetailed Specifications: Roll Cageneelesh_dwivedi7No ratings yet
- AbskjhjvhnkjsdhnfkjxnvDocument10 pagesAbskjhjvhnkjsdhnfkjxnvPriyesh SinghNo ratings yet
- Ijett V11P218Document6 pagesIjett V11P218Mr ShrekNo ratings yet
- Design, Analysis and Fabrication of A Suspension System For An All Terrain VehicleDocument14 pagesDesign, Analysis and Fabrication of A Suspension System For An All Terrain VehicleJuicYm mNo ratings yet
- A Review Paper On Design and Analysis of A Go-Kart ChassisDocument3 pagesA Review Paper On Design and Analysis of A Go-Kart ChassisDuzzysNo ratings yet
- Design and Analysis of A Pushrod Suspension System For A Formula Racing CarDocument4 pagesDesign and Analysis of A Pushrod Suspension System For A Formula Racing CarAmanNo ratings yet
- Numerical Estimation of The Torsional Stiffness CHDocument14 pagesNumerical Estimation of The Torsional Stiffness CHKiran ShetNo ratings yet
- IJMET 06-11-023rollcage Front Impact RefrenceDocument12 pagesIJMET 06-11-023rollcage Front Impact RefrenceMayank GargNo ratings yet
- Design Considerations For Ladder Chassis of A Lightweight VehicleDocument13 pagesDesign Considerations For Ladder Chassis of A Lightweight VehicleJuan Sebastian CameroNo ratings yet
- Design & Fabrication of Front Wheel Upright Assembly For An ATVDocument5 pagesDesign & Fabrication of Front Wheel Upright Assembly For An ATVumeshNo ratings yet
- SSRN Id3372318Document6 pagesSSRN Id3372318K M S RamachandranNo ratings yet
- Ijerm Review Paper 02Document6 pagesIjerm Review Paper 02Sagar GalgatNo ratings yet
- 144 TeamDaksh DesignReportDocument8 pages144 TeamDaksh DesignReportPrathap YaraNo ratings yet
- Irjet V6i4748 PDFDocument6 pagesIrjet V6i4748 PDFsumit sharmaNo ratings yet
- Optimization & Modal Analysis of Engine Mounting Bracket For Different Materials by Using Finite Element AnalysisDocument6 pagesOptimization & Modal Analysis of Engine Mounting Bracket For Different Materials by Using Finite Element AnalysishadiNo ratings yet
- MET2013 Hinojosa RicardoDocument27 pagesMET2013 Hinojosa RicardoAmal GeorgeNo ratings yet
- Design and Optimization of Hub and Knuckle For Formula SAE CarDocument5 pagesDesign and Optimization of Hub and Knuckle For Formula SAE CarTalles OliveiraNo ratings yet
- Hood AnalysisDocument5 pagesHood Analysisymadhu319No ratings yet
- Thesis Paper - eKidART - 55601 PDFDocument7 pagesThesis Paper - eKidART - 55601 PDFretechNo ratings yet
- Chassis Design, Analysis and Testing of A Formula Sae Car ChassisDocument18 pagesChassis Design, Analysis and Testing of A Formula Sae Car ChassisSarvesh Kolekar100% (1)
- Analisis PDFDocument5 pagesAnalisis PDFLuis Alberto Garrido MendozaNo ratings yet
- Design and Fabrication of Race Spec Go-KartDocument6 pagesDesign and Fabrication of Race Spec Go-KartAJER JOURNALNo ratings yet
- N Series: The World Class Truck For Effective WorkDocument10 pagesN Series: The World Class Truck For Effective WorkFausto MorochoNo ratings yet
- DesignDocument11 pagesDesignMahyavanshi DhruvNo ratings yet
- Design and Structural Analysis of An Off Road VehicleDocument7 pagesDesign and Structural Analysis of An Off Road Vehiclegauravme198306No ratings yet
- Design Development and Analysis of Braking System For Student Formula Race CarDocument6 pagesDesign Development and Analysis of Braking System For Student Formula Race Carabdelhameed saedNo ratings yet
- Baja Sae Design ReportDocument14 pagesBaja Sae Design Reportlucky_agrawal45No ratings yet
- A.2017 Roll CageDocument16 pagesA.2017 Roll CageSoundararajanNo ratings yet
- Baja SAE Frame Design: Brooks BitemanDocument22 pagesBaja SAE Frame Design: Brooks BitemanpandasunilNo ratings yet
- Gupta 2022 Eng. Res. Express 4 025039Document21 pagesGupta 2022 Eng. Res. Express 4 025039Mishbah MuwaffaqNo ratings yet
- Calcutiond 3Document7 pagesCalcutiond 3achumilemlata48No ratings yet
- Design Report of Sae Baja IndiaDocument9 pagesDesign Report of Sae Baja Indiagobajasaeindia67% (3)
- The Modern Chassis: A Practical Manual of Automotive Chassis and Suspension DesignFrom EverandThe Modern Chassis: A Practical Manual of Automotive Chassis and Suspension DesignRating: 3.5 out of 5 stars3.5/5 (3)
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainFrom EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainNo ratings yet
- Tesnit Ba 202 Donit1Document2 pagesTesnit Ba 202 Donit1steeluisNo ratings yet
- Press Brake Tooling and Equipment: Rolleri HeadquartersDocument1 pagePress Brake Tooling and Equipment: Rolleri HeadquarterssteeluisNo ratings yet
- Leather BriefcaseDocument34 pagesLeather Briefcasesteeluis100% (3)
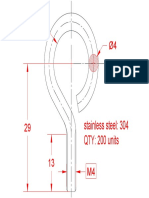
- Stainless Steel: 304 QTY: 200 UnitsDocument1 pageStainless Steel: 304 QTY: 200 UnitssteeluisNo ratings yet
- Trivium Method of Critical Thinking and Creative Problem SolvingDocument5 pagesTrivium Method of Critical Thinking and Creative Problem SolvingsteeluisNo ratings yet
- Spotcheck Penetrant SKL-SPDocument2 pagesSpotcheck Penetrant SKL-SPsteeluisNo ratings yet
- Air Lift Pump Wiki PDFDocument4 pagesAir Lift Pump Wiki PDFsteeluisNo ratings yet
- BGP Route Reflector ConfederationDocument9 pagesBGP Route Reflector ConfederationAll PurposeNo ratings yet
- Jody Howard Director, Social Responsibility Caterpillar, IncDocument17 pagesJody Howard Director, Social Responsibility Caterpillar, IncJanak ValakiNo ratings yet
- What Is Identity As We Now Use The WordDocument46 pagesWhat Is Identity As We Now Use The WordNurul RachmiNo ratings yet
- Rose Water OintmentDocument1 pageRose Water OintmentThomas Niccolo Filamor ReyesNo ratings yet
- The Masterbuilder - February 2012 - Road Engineering SpecialDocument238 pagesThe Masterbuilder - February 2012 - Road Engineering SpecialChaitanya Raj GoyalNo ratings yet
- Mini WorkshopDocument27 pagesMini Workshopapi-548854218No ratings yet
- Evaluating Function GENERAL MATHEMATICSDocument4 pagesEvaluating Function GENERAL MATHEMATICSJane HembraNo ratings yet
- Advertisement in E-CommerceDocument49 pagesAdvertisement in E-CommerceKenz VillanuevaNo ratings yet
- RuttDocument6 pagesRuttJustinian FiloteosNo ratings yet
- A Study of The Aggressiveness Behavior of Senior High School Students of de La Salle Lipa As Predicted by The Perceived Parenting Styles of Their ParentsDocument32 pagesA Study of The Aggressiveness Behavior of Senior High School Students of de La Salle Lipa As Predicted by The Perceived Parenting Styles of Their ParentsVince Catapang100% (1)
- Pinelands National ReserveDocument2 pagesPinelands National ReservesallyNo ratings yet
- Answers QuestioDocument9 pagesAnswers QuestioWendelyn JimenezNo ratings yet
- Module 2Document40 pagesModule 2surya989030No ratings yet
- INE MOR Program Cost Sheet 6.22.2022Document1 pageINE MOR Program Cost Sheet 6.22.2022Steven ScottNo ratings yet
- Paper and PaperboardDocument62 pagesPaper and PaperboardKumkum CrNo ratings yet
- 12 Architecture & Methodology ENDocument36 pages12 Architecture & Methodology ENYash BhatnagarNo ratings yet
- Values and Ethics - Key Definitions NotesDocument20 pagesValues and Ethics - Key Definitions NotesDHANASEKAR K IV A 9023No ratings yet
- Blockchain For Iot: The Challenges and A Way Forward: July 2018Document13 pagesBlockchain For Iot: The Challenges and A Way Forward: July 2018ronicaNo ratings yet
- Wisconsin Public Library Standards 6th Edition 2018 FINALDocument49 pagesWisconsin Public Library Standards 6th Edition 2018 FINALemac1983No ratings yet
- 2011 Amc10-ADocument8 pages2011 Amc10-AKhanh Minh LuuNo ratings yet
- ParallelismDocument6 pagesParallelismsami_bhatiNo ratings yet
- Ingovern Series Electronic Engine Speed Governor Instruction ManualDocument44 pagesIngovern Series Electronic Engine Speed Governor Instruction Manualfelipe floresNo ratings yet
- HERQA QA Auditor Note BookDocument36 pagesHERQA QA Auditor Note Booktebebe solomonNo ratings yet
- CirclesDocument15 pagesCirclesJustine ReanNo ratings yet
- 329672001-Jacobs Engineering Group IncDocument5 pages329672001-Jacobs Engineering Group IncJaram Johnson67% (3)