Download as ppt, pdf, or txt
You might also like
- AFM 240 Spec Sheet V1.1Document2 pagesAFM 240 Spec Sheet V1.1hooshyar100% (1)
- Induction Motor Failure AnalysisDocument8 pagesInduction Motor Failure AnalysisMunazar HussainNo ratings yet
- Steer-by-Wire System Gear Box DesignDocument14 pagesSteer-by-Wire System Gear Box Designأد أبومهند بن همامNo ratings yet
- Baldor Linear Br1202!1!02Document62 pagesBaldor Linear Br1202!1!02Umm E KalsoomNo ratings yet
- BR1202-G Motor LinealDocument48 pagesBR1202-G Motor LinealGerman GodiNo ratings yet
- Edt058 Olejniczak 2015 o PDFDocument23 pagesEdt058 Olejniczak 2015 o PDFDoDuyBacNo ratings yet
- Power Transmission Case StudyDocument1 pagePower Transmission Case StudyDerrick KayitaleNo ratings yet
- Kollmorgen KBM Series 2011 CatalogDocument80 pagesKollmorgen KBM Series 2011 CatalogElectromateNo ratings yet
- Servo Motor Design Using MotorSolveDocument20 pagesServo Motor Design Using MotorSolveSK PNo ratings yet
- Modernization of DC DrivesDocument4 pagesModernization of DC DrivesfaizanNo ratings yet
- Hybrid Technology AVL CapabilitiesDocument52 pagesHybrid Technology AVL Capabilitiesgunardi1204No ratings yet
- Electronic Wedge Brake - EWB: Bernd GombertDocument13 pagesElectronic Wedge Brake - EWB: Bernd Gombertcarlos_garcia_491No ratings yet
- Design of Electro Mechanical ActuatorsDocument17 pagesDesign of Electro Mechanical Actuatorsmohdbaseerullah123No ratings yet
- ASI CatalogDocument32 pagesASI CatalogGP50% (2)
- Janusz Rajski Nilanjan Mukherjee: Mentor Graphics CorporationDocument36 pagesJanusz Rajski Nilanjan Mukherjee: Mentor Graphics CorporationPuja MazumdarNo ratings yet
- NEXANS - Motionline - GB - 19nov10 - 1 Cabos PDFDocument102 pagesNEXANS - Motionline - GB - 19nov10 - 1 Cabos PDFFernando BenzecryNo ratings yet
- IE2 IE3 MotorsDocument11 pagesIE2 IE3 Motorsmaulik1611No ratings yet
- CMC Brush Servo Motor 2011 CatalogDocument4 pagesCMC Brush Servo Motor 2011 CatalogElectromateNo ratings yet
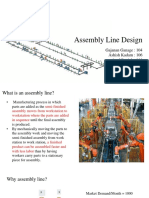
- Assembly Line Design FinalDocument21 pagesAssembly Line Design FinalManas RaneNo ratings yet
- Drive Design in Electric VehiclesDocument7 pagesDrive Design in Electric Vehiclesbzkizo_sbbNo ratings yet
- Electric Motors For PlumbingDocument5 pagesElectric Motors For Plumbingabdullah sahibNo ratings yet
- Advanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitDocument13 pagesAdvanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitShivaram H GNo ratings yet
- Step Motors PrezentacijaDocument125 pagesStep Motors Prezentacijaltd27No ratings yet
- 01 DR TechnologiesDocument80 pages01 DR Technologiesmalini72No ratings yet
- Torque Systems MDM Food Grade Series Product GuideDocument4 pagesTorque Systems MDM Food Grade Series Product GuideElectromateNo ratings yet
- Low Voltage Motor Guide 2018Document112 pagesLow Voltage Motor Guide 2018Yiannis MinoglouNo ratings yet
- Progress Presentation 1Document27 pagesProgress Presentation 1api-301782423No ratings yet
- Industrial SR BrochureDocument4 pagesIndustrial SR BrochureArinder SinghNo ratings yet
- CAOIMPEX Drilling EquipmentDocument14 pagesCAOIMPEX Drilling EquipmentRazi AbbasNo ratings yet
- Electric Drive Zero LectureDocument13 pagesElectric Drive Zero LectureTushar TyagiNo ratings yet
- 225 To 900 KW ContainerisedDocument6 pages225 To 900 KW Containerisedhermit44535No ratings yet
- Design and Fabrication of A Semi Automatic Gear Shifting Mechanism For UTeM Formula Style Race Car - 24 PagesDocument24 pagesDesign and Fabrication of A Semi Automatic Gear Shifting Mechanism For UTeM Formula Style Race Car - 24 PagesAditya GuptaNo ratings yet
- Speed Breaker Power GenerationDocument21 pagesSpeed Breaker Power GenerationmukundNo ratings yet
- XS4921 2300XPC DC BroDocument8 pagesXS4921 2300XPC DC BroRaul Mendoza Subia100% (1)
- Motorized Scotch Yoke MechanismDocument15 pagesMotorized Scotch Yoke MechanismAlpaNo ratings yet
- Selecting A Conveyor DriveDocument7 pagesSelecting A Conveyor Drivegopi_ggg20016099100% (1)
- "Power Train Mount Optimization": Mr. Kiran D MojadDocument19 pages"Power Train Mount Optimization": Mr. Kiran D Mojadgaurav patilNo ratings yet
- Motorised Jack With Rach Lock MechanismDocument26 pagesMotorised Jack With Rach Lock MechanismPrajay BhavsarNo ratings yet
- CSIRO EV Research PDFDocument27 pagesCSIRO EV Research PDFschlemihl69No ratings yet
- WECC Generating Facility Data, Testing and Model Validation RequirementsDocument38 pagesWECC Generating Facility Data, Testing and Model Validation RequirementsFarhad YahyaieNo ratings yet
- CMC Brushless Servo Motor 2011 CatalogDocument4 pagesCMC Brushless Servo Motor 2011 CatalogElectromateNo ratings yet
- ch1 IntroDocument18 pagesch1 IntroZoran Jovanovic0% (1)
- Comparative Study of Using Different Electric Motors For EVDocument4 pagesComparative Study of Using Different Electric Motors For EVnaourez benhadjNo ratings yet
- Performance Analysis of Three Phase Full Bridge Converter Controlled DC MotorDocument45 pagesPerformance Analysis of Three Phase Full Bridge Converter Controlled DC Motoranon_451051243No ratings yet
- Solar PV Panels The Best Option: Reliability ServiceDocument2 pagesSolar PV Panels The Best Option: Reliability ServicejprakashusNo ratings yet
- Motor ClasstyDocument128 pagesMotor Classtywatep_08No ratings yet
- VFDDocument13 pagesVFDvenumechNo ratings yet
- Kollmorgen Nema 34 N3 K3 Stepper Systems TB SpecsheetDocument4 pagesKollmorgen Nema 34 N3 K3 Stepper Systems TB SpecsheetElectromateNo ratings yet
- Applications of PMBLDC Motor2Document11 pagesApplications of PMBLDC Motor2Adel TatishNo ratings yet
- The Motor Guide ABBDocument135 pagesThe Motor Guide ABBmatchoo87No ratings yet
- Dynamometer: Theory and Application to Engine TestingFrom EverandDynamometer: Theory and Application to Engine TestingNo ratings yet
- Engineering Principles of Combat Modeling and Distributed SimulationFrom EverandEngineering Principles of Combat Modeling and Distributed SimulationNo ratings yet
- Model Predictive Control of High Power Converters and Industrial DrivesFrom EverandModel Predictive Control of High Power Converters and Industrial DrivesNo ratings yet
- AutoCAD Electrical 2024 for Electrical Control Designers, 15th EditionFrom EverandAutoCAD Electrical 2024 for Electrical Control Designers, 15th EditionNo ratings yet
- AutoCAD Electrical 2024 for Electrical Control Designers, 15th EditionFrom EverandAutoCAD Electrical 2024 for Electrical Control Designers, 15th EditionNo ratings yet
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet