Download as pdf or txt
You might also like
- Tork Tech Crown VicDocument55 pagesTork Tech Crown Vicnyinterceptor0% (1)
- RT Flex SulzerDocument59 pagesRT Flex SulzerEmurhohwo Jeremiah75% (4)
- Common Rail Systems by LiebherrDocument24 pagesCommon Rail Systems by LiebherrHùng Phạm100% (2)
- Nav 009Document10 pagesNav 009Vishnu Vardhan Reddy YerasiNo ratings yet
- Eea 60 4 2012 038 EN LP 000Document6 pagesEea 60 4 2012 038 EN LP 000kubikNo ratings yet
- BLDC Veh DecouplingDocument6 pagesBLDC Veh Decouplingtarunteotia19No ratings yet
- A Skid Steering Model With Track Pad Flexibility 2007 Journal of TerramechanicsDocument16 pagesA Skid Steering Model With Track Pad Flexibility 2007 Journal of TerramechanicsSetiyawan TrioNo ratings yet
- Scaled Vehicle Cornering StiffnessDocument5 pagesScaled Vehicle Cornering Stiffnessandi suntoroNo ratings yet
- 1.an Introduction To Regenerative Braking of Electric Vehicles AsDocument5 pages1.an Introduction To Regenerative Braking of Electric Vehicles AsEssa SiddiquiNo ratings yet
- Analysis of Braking Force Efficiency MeasurementsDocument7 pagesAnalysis of Braking Force Efficiency MeasurementsHsan HaddarNo ratings yet
- Fuzzy LogicDocument6 pagesFuzzy Logicl_boy93No ratings yet
- Wheel Slip Control For All Wheel Drive eDocument31 pagesWheel Slip Control For All Wheel Drive elinh quangNo ratings yet
- Vehicle Dynamics With Independent 4WSDocument20 pagesVehicle Dynamics With Independent 4WSAl LGNo ratings yet
- Parametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RDocument6 pagesParametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RInternational Journal of computational Engineering research (IJCER)No ratings yet
- Gradeability For Automobiles: Akilesh YamsaniDocument7 pagesGradeability For Automobiles: Akilesh YamsaninrjmanitNo ratings yet
- Automotive Laboratory Manual: MAK 411E Experimental Methods in Mechanical EngineeringDocument22 pagesAutomotive Laboratory Manual: MAK 411E Experimental Methods in Mechanical EngineeringSenthil Muthu Kumar TNo ratings yet
- Multiobjective Optimal Design of An Inverter Fed Axial Flux Permanent Magnet In-Wheel Motor For Electric VehiclesDocument23 pagesMultiobjective Optimal Design of An Inverter Fed Axial Flux Permanent Magnet In-Wheel Motor For Electric Vehiclesrasim_m1146No ratings yet
- Motorcycle Steering Torque Decomposition: V. Cossalter, R. Lot, M. Massaro, M. PerettoDocument6 pagesMotorcycle Steering Torque Decomposition: V. Cossalter, R. Lot, M. Massaro, M. PerettoSébastien DecormeNo ratings yet
- Vehicle Dynamics NotesDocument116 pagesVehicle Dynamics NotesJagadesh AbbuNo ratings yet
- Electric Vehicle 2nd ModuleDocument22 pagesElectric Vehicle 2nd ModuleAmruth DeshpandeNo ratings yet
- Ijmet 09 07 045Document13 pagesIjmet 09 07 045shreyashNo ratings yet
- MPC Based Yaw and Lateral Stabilisation Via Active Front Steering and Braking PDFDocument19 pagesMPC Based Yaw and Lateral Stabilisation Via Active Front Steering and Braking PDFKiran KoneNo ratings yet
- Integration of Magic Formula Tire Model With Vehicle Handling ModelDocument7 pagesIntegration of Magic Formula Tire Model With Vehicle Handling ModelFabio Bazakas ZetolaNo ratings yet
- Motor Torque Calculations For Electric Vehicle PDFDocument2 pagesMotor Torque Calculations For Electric Vehicle PDFPasupuleti SivakumarNo ratings yet
- Art. Ackermann BunteDocument8 pagesArt. Ackermann BunteENIC-AITCGNo ratings yet
- SR662Document38 pagesSR662BabulalSahuNo ratings yet
- Evaluation of Vehicle Handling by A Simplified Single Track ModelDocument11 pagesEvaluation of Vehicle Handling by A Simplified Single Track Modelnvs1981No ratings yet
- Design and Evaluation On Electric Differentials For Overactuated Electric Ground Vehicles With Four Independent In-Wheel MotorsDocument9 pagesDesign and Evaluation On Electric Differentials For Overactuated Electric Ground Vehicles With Four Independent In-Wheel MotorsPsyBabaNo ratings yet
- Double Line ChangeDocument17 pagesDouble Line ChangeDragoș Gabriel Hrihor100% (1)
- Adams 2dof Car TutorialDocument19 pagesAdams 2dof Car TutorialShashank KatiyarNo ratings yet
- Power Losses and Energy Efficiency of Multi-Wheel Drive VehiclesDocument12 pagesPower Losses and Energy Efficiency of Multi-Wheel Drive VehiclesDeepak KayNo ratings yet
- 2 67 1628858339 4ijmperdoct202144Document14 pages2 67 1628858339 4ijmperdoct202144TJPRC PublicationsNo ratings yet
- Modelling and Testing of In-Wheel Motor Drive Intelligent Electric Vehicles Based On Co-Simulation With CarsimSimulinkDocument9 pagesModelling and Testing of In-Wheel Motor Drive Intelligent Electric Vehicles Based On Co-Simulation With CarsimSimulinkadityasinghal08No ratings yet
- Harvesting - Suspension - JVA FinalDocument8 pagesHarvesting - Suspension - JVA Finaljerf0281No ratings yet
- Car Suspension Over BumpDocument23 pagesCar Suspension Over BumpVairasivam Karisna KumarNo ratings yet
- Simulation and Comparison of A PID Controller For An Anti-Lock Braking SystemDocument9 pagesSimulation and Comparison of A PID Controller For An Anti-Lock Braking SystemSOUMIA IGHILNo ratings yet
- Vib Project Full Nfinal 21 JuneDocument35 pagesVib Project Full Nfinal 21 Junedevil330No ratings yet
- Active Vehicle Safety Using Integrated Control ofDocument19 pagesActive Vehicle Safety Using Integrated Control ofakareem1755No ratings yet
- Estimation of Vehicle Sideslip, Tire Force and Wheel Cornering StiffnessDocument10 pagesEstimation of Vehicle Sideslip, Tire Force and Wheel Cornering StiffnessKunheechoNo ratings yet
- Steer-By-Wire For Vehicle State Estimation and ControlDocument6 pagesSteer-By-Wire For Vehicle State Estimation and ControlvincemugnaioNo ratings yet
- Thesis For Car Game PhysicsDocument54 pagesThesis For Car Game PhysicsbrokenNo ratings yet
- Steering DesignDocument6 pagesSteering DesignAsif HussainNo ratings yet
- Nikhil PawarDocument16 pagesNikhil PawarNikhil PawarNo ratings yet
- Unscented Kalman Filter For Real-Time Vehicle Lateral Tire Forces and Sideslip Angle EstimationDocument6 pagesUnscented Kalman Filter For Real-Time Vehicle Lateral Tire Forces and Sideslip Angle Estimationneel1237No ratings yet
- Bond GraphDocument30 pagesBond GraphMaitham DibNo ratings yet
- Torque Vectoring With A Feedback and Feed Forward Controller-Applied To A Through The Road Hybrid Electric VehicleDocument6 pagesTorque Vectoring With A Feedback and Feed Forward Controller-Applied To A Through The Road Hybrid Electric Vehiclesmmj2010No ratings yet
- VD Tyre ModelDocument6 pagesVD Tyre Modelfakhar mahtabNo ratings yet
- Digital Assignment - 1: Name: Shaik Naveed REG NO:20BMA0032 Subject: Automotive ChassisDocument8 pagesDigital Assignment - 1: Name: Shaik Naveed REG NO:20BMA0032 Subject: Automotive ChassisNaveed kingNo ratings yet
- 514design and Fabrication of Anti Roll Back System in Vehicles Using Ratchet and Pawl Mechanism PDFDocument4 pages514design and Fabrication of Anti Roll Back System in Vehicles Using Ratchet and Pawl Mechanism PDFJeevan Landge PatilNo ratings yet
- Robust Motion Control of A 4WD SSMRDocument5 pagesRobust Motion Control of A 4WD SSMRSercan ArslanNo ratings yet
- L049062069 PDFDocument8 pagesL049062069 PDFSandra MarkivNo ratings yet
- Research On Regenerative Braking Control Strategy of Hybrid Electric VehicleDocument4 pagesResearch On Regenerative Braking Control Strategy of Hybrid Electric VehicleRajesh MaleyNo ratings yet
- ICAC2021 YK NAO VV DI DG Optimized Selfadaptive PID Speed Control For Autonomous VehiclesDocument6 pagesICAC2021 YK NAO VV DI DG Optimized Selfadaptive PID Speed Control For Autonomous VehiclesLy Hoang HiepNo ratings yet
- Lecture 04Document38 pagesLecture 04Thomas GiannoneNo ratings yet
- Simulation of Dynamic Rollover There SH Old For Heavy TrucksDocument9 pagesSimulation of Dynamic Rollover There SH Old For Heavy TrucksDCcover100% (1)
- Bond Graph Modeling and Simulation of A FullDocument6 pagesBond Graph Modeling and Simulation of A FullAnirban MitraNo ratings yet
- Time Delays May Come From The Retardation of Either A Controller or An Actuator inDocument6 pagesTime Delays May Come From The Retardation of Either A Controller or An Actuator inpankaj arvikarNo ratings yet
- Full Vehicle Simulation ModelDocument24 pagesFull Vehicle Simulation ModelIqbal NugrohoNo ratings yet
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
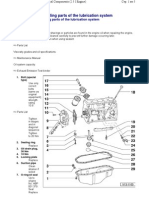
- 2,5 TDI R5 Removing and Installing Parts of The Lubrication SystemDocument5 pages2,5 TDI R5 Removing and Installing Parts of The Lubrication SystemmoshkeNo ratings yet
- Technical-Circular - Change Over of LSMGO To ECADocument3 pagesTechnical-Circular - Change Over of LSMGO To ECAtrongthemai_80475818100% (1)
- Boiler Question Paper Format PowerPoint PresentationDocument12 pagesBoiler Question Paper Format PowerPoint PresentationPagan jatarNo ratings yet
- Kit Car Builder July August 2014Document63 pagesKit Car Builder July August 2014sanderribeiroNo ratings yet
- Industrial Training Report PDFDocument67 pagesIndustrial Training Report PDFAjulo jask100% (1)
- Lancia Thesis Fuel ConsumptionDocument7 pagesLancia Thesis Fuel ConsumptionHelpWritingCollegePapersSavannah100% (2)
- Oxygen Sensor 2Document2 pagesOxygen Sensor 2Kevin Strong100% (1)
- Deepwater ConquerorDocument3 pagesDeepwater ConquerorTim ClarkeNo ratings yet
- Extra Light Fuel Oil (LFO)Document2 pagesExtra Light Fuel Oil (LFO)Sarbast H. SaeedNo ratings yet
- Damper For Range Gear Changing GR801-900, GRS890-900 Work DescriptionDocument8 pagesDamper For Range Gear Changing GR801-900, GRS890-900 Work DescriptionfugegaNo ratings yet
- Manufacturing The Electric Vehicle: A Window of Technological Opportunity For Southern CaliforniaDocument42 pagesManufacturing The Electric Vehicle: A Window of Technological Opportunity For Southern CaliforniaYoMos Tự NhiênNo ratings yet
- Zirconium Oxide Oxygen SensorsDocument3 pagesZirconium Oxide Oxygen SensorsBhavin GandhiNo ratings yet
- Jojoba DefDocument20 pagesJojoba DefdilipootyNo ratings yet
- AL400 Ashok Leyland (2017-2022) Engines Spare Parts: SearchDocument5 pagesAL400 Ashok Leyland (2017-2022) Engines Spare Parts: SearchAnbarasanNo ratings yet
- RT FlexDocument3 pagesRT FlexGaby CrisNo ratings yet
- 2001 DDC Catalog - Xls - Detroit - Diesel - Two-Cycle - EnginesDocument8 pages2001 DDC Catalog - Xls - Detroit - Diesel - Two-Cycle - EnginesOperaciones Max Diesel Pro100% (1)
- Pre-Sulfiding On-Line Sulfiding ProceduresDocument8 pagesPre-Sulfiding On-Line Sulfiding ProceduresIrma Brennan0% (1)
- 9.4 Wärtslilä 6R22HF and 8R22HF Governor Installation DataDocument2 pages9.4 Wärtslilä 6R22HF and 8R22HF Governor Installation DataKen VikstromNo ratings yet
- Innio BR t4 Update A4 en 2019 Screen Ijb-119004-EnDocument2 pagesInnio BR t4 Update A4 en 2019 Screen Ijb-119004-EnDiego UmañaNo ratings yet
- Gasteiger-Benchmarks Article PDFDocument27 pagesGasteiger-Benchmarks Article PDFMichael LiNo ratings yet
- Combustion HandoutDocument16 pagesCombustion HandoutAbdallah Irfaan Ramjan100% (1)
- Process Description of MtbeDocument3 pagesProcess Description of Mtbeiszhani11No ratings yet
- Fuel Injection Pump Timing - AdjustDocument6 pagesFuel Injection Pump Timing - AdjustRonald Yucra Cadena100% (2)
- Service Bulletin Trucks: Unit Injectors, ReplacementDocument23 pagesService Bulletin Trucks: Unit Injectors, ReplacementbabyNo ratings yet
- Sulfur CaptureDocument22 pagesSulfur Capturegpeck0012763No ratings yet
- 797F EngDocument2 pages797F EngJuan Galarza AiteNo ratings yet
- Compresor P185 Ingersoll RandDocument190 pagesCompresor P185 Ingersoll RandGerardo Can67% (3)