Download as doc, pdf, or txt
You might also like
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Intelligent Braking SystemDocument19 pagesIntelligent Braking SystemHarsh Gaming100% (2)
- FinalpptDocument20 pagesFinalpptjyotishmoyhazarika72No ratings yet
- Fabrication and Analysis of Intelligent Braking SystemDocument19 pagesFabrication and Analysis of Intelligent Braking SystemVishal LabdeNo ratings yet
- Non-Invasive Robotic Wheelchair Revised)Document4 pagesNon-Invasive Robotic Wheelchair Revised)Philip McKennaNo ratings yet
- Automatic Wheel ChairDocument4 pagesAutomatic Wheel Chairsuraj dhulannavarNo ratings yet
- Introduction To Accelerometer Controlled Wheel ChairDocument26 pagesIntroduction To Accelerometer Controlled Wheel Chairpradeep100% (1)
- Diy Lab ProjectDocument19 pagesDiy Lab Projectmdipanwita48No ratings yet
- DR - Ambedkar Institute of Technology Department of Telecommunication Engineering 2015-2016Document25 pagesDR - Ambedkar Institute of Technology Department of Telecommunication Engineering 2015-2016ashishNo ratings yet
- Smart Zebra CrossingDocument3 pagesSmart Zebra CrossingInternational Journal of Innovative Science and Research Technology100% (2)
- Presentation AuraDocument15 pagesPresentation AuraShivam YadavNo ratings yet
- Automated Guided VehicleDocument4 pagesAutomated Guided VehicleGaurav UmarNo ratings yet
- Eye Directive WheelchairDocument4 pagesEye Directive WheelchairRamaswamy SubbiahNo ratings yet
- Reverse Locking MechanismDocument34 pagesReverse Locking Mechanism123 456No ratings yet
- .Follower Robotic Cart Using Ultrasonic SensorDocument4 pages.Follower Robotic Cart Using Ultrasonic SensorArvin LanceNo ratings yet
- Edc Report .FinalDocument12 pagesEdc Report .Finalreddysairam403No ratings yet
- Eye Directive Wheelchair SeminarDocument18 pagesEye Directive Wheelchair SeminarSagar walanjNo ratings yet
- Paper22304 2307Document4 pagesPaper22304 2307AjeeshNo ratings yet
- Ultrasonic Car ParkingDocument7 pagesUltrasonic Car Parkingxpeprishey100% (3)
- Saurabh Paper PresentationDocument10 pagesSaurabh Paper PresentationrahulNo ratings yet
- Major Project - PPTX - Design and Assembly of Intelligent Braking SystemDocument16 pagesMajor Project - PPTX - Design and Assembly of Intelligent Braking SystemAditya KobbaiNo ratings yet
- IJCRT2207414 Mini Project Reasearch PaperDocument10 pagesIJCRT2207414 Mini Project Reasearch PaperHimanshu KumarNo ratings yet
- DJ StrikeDocument12 pagesDJ StrikeAyush ToliaNo ratings yet
- Wheelchair Obstacle Avoidance Based On FuzzyDocument3 pagesWheelchair Obstacle Avoidance Based On FuzzyVijay KumarNo ratings yet
- 89.ultrasonic Sensor in Automative Applications in Distance MeasurementDocument4 pages89.ultrasonic Sensor in Automative Applications in Distance Measurementvinay_2211No ratings yet
- Fundamentals of RoboticsDocument5 pagesFundamentals of RoboticsFranklin Jara MoncayoNo ratings yet
- Introduction of Intelligent Wireless Video CameraDocument2 pagesIntroduction of Intelligent Wireless Video Camerararaju83_366055182No ratings yet
- Obstacle Avoider Robotic Vehicle: Working PrincipleDocument3 pagesObstacle Avoider Robotic Vehicle: Working PrincipleMegharaj ShivaramNo ratings yet
- Mini Report-Reverse Braking SystemDocument25 pagesMini Report-Reverse Braking Systemkanchan boneNo ratings yet
- FINAL YEAR PresentationDocument25 pagesFINAL YEAR PresentationShivam TiwariNo ratings yet
- Design of Smart Car Using LabviewDocument6 pagesDesign of Smart Car Using LabviewSrinivas VeeruNo ratings yet
- Fabrication of Conceptual Model of Intelligent Braking SystemDocument35 pagesFabrication of Conceptual Model of Intelligent Braking SystemJeevanNo ratings yet
- Mini ProjectDocument14 pagesMini Projecttefflon trolegdyNo ratings yet
- GaganDocument21 pagesGaganGagan Kumar R VNo ratings yet
- Intelligent Wheel Chair For Disabled PersonDocument5 pagesIntelligent Wheel Chair For Disabled PersonIJIRSTNo ratings yet
- Intelligent Car Parking System: S. Avinash, Sneha Mittra, Sudipta Nayan Gogoi & C. SureshDocument7 pagesIntelligent Car Parking System: S. Avinash, Sneha Mittra, Sudipta Nayan Gogoi & C. SureshHuy CườngNo ratings yet
- Pavani Mini Project - 115817Document23 pagesPavani Mini Project - 115817Yelagum RahulNo ratings yet
- Automatic Distance ControllerDocument10 pagesAutomatic Distance Controllervivek dongareNo ratings yet
- Self Breaking and Safety SystemDocument10 pagesSelf Breaking and Safety SystemTriambikey JoshiNo ratings yet
- Gate 2024 AeDocument13 pagesGate 2024 Aeabhaymadathil4No ratings yet
- Ijet V3i3p9Document14 pagesIjet V3i3p9International Journal of Engineering and TechniquesNo ratings yet
- Reverse Car Parking System: IOT Project OnDocument12 pagesReverse Car Parking System: IOT Project OnShraddha Tamhane100% (1)
- Automated Guided VehicleDocument10 pagesAutomated Guided VehicleLikepageLikeitNo ratings yet
- Intelligent Wireless Video CameraDocument2 pagesIntelligent Wireless Video CameraMurali Sammeta100% (1)
- Final ProjectDocument30 pagesFinal Projectmkmks000000No ratings yet
- GRP ProjectDocument8 pagesGRP ProjectgunmeetsinghNo ratings yet
- Wireless Glove CommanderDocument7 pagesWireless Glove CommanderAakash SheelvantNo ratings yet
- Abstract - This Paper Presents An Ultrasonic Automatic Braking System For ForwardDocument10 pagesAbstract - This Paper Presents An Ultrasonic Automatic Braking System For ForwardsathishNo ratings yet
- Project ProposalDocument3 pagesProject ProposalAhsan TariqNo ratings yet
- IJNTR03060017Document20 pagesIJNTR03060017Devansh AggrawalNo ratings yet
- Arunai Engineering College: Robotics Micromouse On Open SourceDocument12 pagesArunai Engineering College: Robotics Micromouse On Open SourceMadhanmohan ChandrasekaranNo ratings yet
- Ecs - Tam - ProjectreportDocument13 pagesEcs - Tam - ProjectreportRahulCsrbharadwajNo ratings yet
- Major ProjectDocument17 pagesMajor ProjectAbhishek ShyamalNo ratings yet
- Smart Parking IoISDP2Document26 pagesSmart Parking IoISDP2Wajdi BELLILNo ratings yet
- Chapter-1 Literature Survey: Aim of Our ProjectDocument4 pagesChapter-1 Literature Survey: Aim of Our ProjectCatherine Protas100% (1)
- Under The Guidance of Mr. Pankaj Chawla HOD Electrical DeptDocument21 pagesUnder The Guidance of Mr. Pankaj Chawla HOD Electrical DeptHorvat NorbertNo ratings yet
- Automatic Ambulance Rescue SystemDocument4 pagesAutomatic Ambulance Rescue SystemCrispNo ratings yet
- Autonomous CarDocument16 pagesAutonomous CarDeepak MeenaNo ratings yet
- Automatic Brake Failure Indicator and Over Heating AlarmDocument11 pagesAutomatic Brake Failure Indicator and Over Heating AlarmAakash SheelvantNo ratings yet
- Autonomous Cleaning RobotDocument4 pagesAutonomous Cleaning RobotAakash SheelvantNo ratings yet
- S124-Solar Based Mobile Charger For Rural AreasDocument4 pagesS124-Solar Based Mobile Charger For Rural AreasYellaturi Siva Kishore ReddyNo ratings yet
- Design and Development of "Suraksha"-A Women SafetyDocument9 pagesDesign and Development of "Suraksha"-A Women SafetyAakash SheelvantNo ratings yet
- Automated Rope Climbing RobotDocument10 pagesAutomated Rope Climbing RobotAakash SheelvantNo ratings yet
- Multiuser Short Message Service Based Wireless Electronic Notice BoardDocument7 pagesMultiuser Short Message Service Based Wireless Electronic Notice BoardPavanJangidNo ratings yet
- ATM Security Using Fingerprint RecognitionDocument6 pagesATM Security Using Fingerprint RecognitionAakash SheelvantNo ratings yet
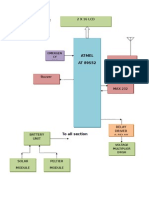
- Safety Block DiagramDocument1 pageSafety Block DiagramAakash SheelvantNo ratings yet
- Autonomous Indoor Helicopter Flight Using A Single Onboard CameraDocument8 pagesAutonomous Indoor Helicopter Flight Using A Single Onboard CameraAakash SheelvantNo ratings yet
- Part 4 - Using A Discrete Fourier Series To Model DataDocument4 pagesPart 4 - Using A Discrete Fourier Series To Model DataKyle DonagheyNo ratings yet
- GE-1205 Radar Level Gauge Transmitter MeterDocument1 pageGE-1205 Radar Level Gauge Transmitter Metersales1068No ratings yet
- Microelectronic PillDocument13 pagesMicroelectronic PillOßÏdÁ ShÄHÊÉÑNo ratings yet
- CourseStrucSyllabi 5yrDualWCN2012Document86 pagesCourseStrucSyllabi 5yrDualWCN2012surabhidivyaNo ratings yet
- 3500 42 Proximitor Seismic Monitor Module Op Maintenance ManDocument224 pages3500 42 Proximitor Seismic Monitor Module Op Maintenance Manamidi5555913100% (1)
- Improved Energy Detector For Random Signals in Gaussian NoiseDocument6 pagesImproved Energy Detector For Random Signals in Gaussian Noisesuchi87No ratings yet
- RDC633XM Mixed Cutting SystemDocument13 pagesRDC633XM Mixed Cutting SystemnammarisNo ratings yet
- Ee 705-Vlsi Design Lab: Describing A Finite State Machine (FSM)Document10 pagesEe 705-Vlsi Design Lab: Describing A Finite State Machine (FSM)Indranil ChakrabortyNo ratings yet
- Introduction To Networking CT043-3-1 Data Communication Model and ArchitecturesDocument28 pagesIntroduction To Networking CT043-3-1 Data Communication Model and ArchitecturesThinesh BalanNo ratings yet
- 3BDD010423 CIO S900 Manual Digital Modules-DO910-DX910Document38 pages3BDD010423 CIO S900 Manual Digital Modules-DO910-DX910aharnishaNo ratings yet
- Digital Signal Processing Lab 4: Figure 3.1: Basic View of Sampling TheoremDocument3 pagesDigital Signal Processing Lab 4: Figure 3.1: Basic View of Sampling Theoremfahadsaeed93No ratings yet
- Analog Vs Digital CommunicationDocument6 pagesAnalog Vs Digital CommunicationYOGESHNo ratings yet
- EME Graduate Profile 2013Document261 pagesEME Graduate Profile 2013Mehak FatimaNo ratings yet
- Et200s 4di Dc24 ST Manual en-USDocument14 pagesEt200s 4di Dc24 ST Manual en-USzvonkomihajlovic4891No ratings yet
- PCM PrincipleDocument31 pagesPCM PrincipleSachin PatelNo ratings yet
- Xinhua Digital Electro-Hydraulic Control System DEH-V For Steam TurbinesDocument36 pagesXinhua Digital Electro-Hydraulic Control System DEH-V For Steam TurbineselrajilNo ratings yet
- Protection Relays Guide 2012-Schneider ElectricDocument56 pagesProtection Relays Guide 2012-Schneider ElectricPradeep_Vashist100% (1)
- Lab2 SignalsDocument4 pagesLab2 SignalsMelih AtaseverNo ratings yet
- Yaskawa CNC Programme ManualDocument128 pagesYaskawa CNC Programme Manualchidambaram kasiNo ratings yet
- Product Catalogue Differential Pressure TransmitterDocument28 pagesProduct Catalogue Differential Pressure Transmitterprasana balajiNo ratings yet
- Noise in CATV NetworkDocument5 pagesNoise in CATV NetworkMarco TorresNo ratings yet
- Sumpi - ManualDocument78 pagesSumpi - ManualneomendesNo ratings yet
- AnalogDocument16 pagesAnalogchandushar1604No ratings yet
- DGB OpendtectDocument219 pagesDGB Opendtectmuhmus88No ratings yet
- ADE7753 EvalBoardDocument20 pagesADE7753 EvalBoardRicardo Hyppolite FleriscatNo ratings yet
- Translinear Signal Processing Circuits in Standard Cmos FpaaDocument19 pagesTranslinear Signal Processing Circuits in Standard Cmos FpaaLuis Arturo Martinez AlvaradoNo ratings yet
- Cbeg3152: Process Dynamics and ControlDocument80 pagesCbeg3152: Process Dynamics and ControlhabteNo ratings yet
- LS07 Chassis Service ManualDocument33 pagesLS07 Chassis Service ManualnaughtybigboyNo ratings yet
- 1181 Datasheet PDFDocument10 pages1181 Datasheet PDFmanikkalsiNo ratings yet
- Ge - D60 RelayDocument460 pagesGe - D60 RelayRamesh KumarNo ratings yet