Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- ENG TECH 4MA3 Assignment 2020 FallDocument6 pagesENG TECH 4MA3 Assignment 2020 FallRyan TorresNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 3 Cylinders Engines For Skoda Cars (Engine Code AWY & AZQ)Document26 pages3 Cylinders Engines For Skoda Cars (Engine Code AWY & AZQ)kikouchaa100% (7)
- Neptuno Pumps® Engineered Pump Catalog 50 HZ Perfomance CurvesDocument137 pagesNeptuno Pumps® Engineered Pump Catalog 50 HZ Perfomance CurvessriguruprasathsNo ratings yet
- Top-Notch Amenities Standing Tall: An Elegant Residential LandmarkDocument2 pagesTop-Notch Amenities Standing Tall: An Elegant Residential LandmarkSaxenaNo ratings yet
- 16956416438345Document1 page16956416438345SaxenaNo ratings yet
- Georeferencing ArcgisDocument57 pagesGeoreferencing ArcgisSaxenaNo ratings yet
- LandSerf 2Document1 pageLandSerf 2SaxenaNo ratings yet
- Geomorphometry and Landform Mapping, What Is A LandformDocument13 pagesGeomorphometry and Landform Mapping, What Is A LandformSaxenaNo ratings yet
- Acupressure Therapy - Pressure Point TherapyDocument8 pagesAcupressure Therapy - Pressure Point TherapySaxenaNo ratings yet
- GeomappingDocument10 pagesGeomappingSaxenaNo ratings yet
- Lecture1 (DIPintro)Document16 pagesLecture1 (DIPintro)SaxenaNo ratings yet
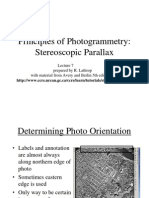
- Principles of Photogrammetry: Stereoscopic ParallaxDocument33 pagesPrinciples of Photogrammetry: Stereoscopic ParallaxSaxenaNo ratings yet
- Amaresh Kr. Singh & S. Ravi PrakashDocument23 pagesAmaresh Kr. Singh & S. Ravi PrakashSaxenaNo ratings yet
- 12 GPSDocument57 pages12 GPSSaxenaNo ratings yet
- GIS Applications in The Environment & Geomorphology GISDocument8 pagesGIS Applications in The Environment & Geomorphology GISSaxenaNo ratings yet
- 6-Attribute Data Input and ManagementDocument14 pages6-Attribute Data Input and ManagementSaxenaNo ratings yet
- Dynamic Model of Robot Manipulators: Claudio MelchiorriDocument65 pagesDynamic Model of Robot Manipulators: Claudio MelchiorriSaxenaNo ratings yet
- Terms, Concepts and Data Types in Gis: Orhan GündüzDocument17 pagesTerms, Concepts and Data Types in Gis: Orhan GündüzSaxenaNo ratings yet
- 1 Introduction GisDocument21 pages1 Introduction GisSaxena100% (1)
- Mala Membership ApplicationDocument1 pageMala Membership ApplicationSaxenaNo ratings yet
- Kolmeks Pump Catalogue Low PDFDocument260 pagesKolmeks Pump Catalogue Low PDFsriguruprasathsNo ratings yet
- Unit 1Document5 pagesUnit 1N Dhanunjaya Rao BorraNo ratings yet
- Kuorma AutohydrauliikkaaDocument40 pagesKuorma AutohydrauliikkaaSAMNo ratings yet
- Code-Check of Anchors (AISC) - IDEA StatiCaDocument7 pagesCode-Check of Anchors (AISC) - IDEA StatiCamehmetmehmetmehmet111111No ratings yet
- Conveyor Components - Douglas CatalogDocument133 pagesConveyor Components - Douglas CatalogCesar Muñoz OssesNo ratings yet
- CarboDur Shear StrengthDocument16 pagesCarboDur Shear StrengthrogirosNo ratings yet
- 3 Sec-III-Hardware Fittings & AccessoriesDocument49 pages3 Sec-III-Hardware Fittings & AccessoriesTravis WoodNo ratings yet
- Tool Catalogue 1Document63 pagesTool Catalogue 1IKNo ratings yet
- PCS125 Midterm W2011Document4 pagesPCS125 Midterm W2011wackokidNo ratings yet
- COR Handling+and+Storage+Recommendations EN Rev2 2018 GL 1003 PreviewDocument4 pagesCOR Handling+and+Storage+Recommendations EN Rev2 2018 GL 1003 PreviewAli AliNo ratings yet
- M32b Wheel AlignmentDocument6 pagesM32b Wheel Alignmentcarlos_garcia_491No ratings yet
- VibrationsDocument93 pagesVibrationsbislerinit86% (7)
- 25 Frame Plunger Pump: Standard Brass Model Stainless Steel Model Nickel Aluminum Bronze ModelDocument4 pages25 Frame Plunger Pump: Standard Brass Model Stainless Steel Model Nickel Aluminum Bronze ModelAnonymous IN80L4rRNo ratings yet
- FormulaSheet For EM and SHM v1.1.1Document1 pageFormulaSheet For EM and SHM v1.1.1陳輝王No ratings yet
- Thermodynamics Tutorial 6 Air Compressors: © D.J.Dunn 1Document26 pagesThermodynamics Tutorial 6 Air Compressors: © D.J.Dunn 1Eddie SantillánNo ratings yet
- Bernoulli Theorem DemonstrationDocument27 pagesBernoulli Theorem DemonstrationmanzahuhuNo ratings yet
- Landfill-Gas-Engine-Oil AnalysisDocument2 pagesLandfill-Gas-Engine-Oil AnalysisKeith ChengNo ratings yet
- Quiz # 1Document3 pagesQuiz # 1Hesham badawy100% (1)
- Evert Hoek Results CalcDocument6 pagesEvert Hoek Results CalcKanaiyalal N. ShethNo ratings yet
- BTVDocument12 pagesBTVJuan HernandezNo ratings yet
- BS 5 CentrifugationDocument69 pagesBS 5 CentrifugationAllyana Marie TiemsimNo ratings yet
- Momentum WorksheetDocument4 pagesMomentum WorksheetemilyNo ratings yet
- Dryer - Donaldson DV-AP SeriesDocument40 pagesDryer - Donaldson DV-AP Seriesehs.simtambun1No ratings yet
- 079 - Flexlube - CYL. LUB - SYSTEM v2Document29 pages079 - Flexlube - CYL. LUB - SYSTEM v2Антон Сорока100% (1)
- Lec Chapter 10 Particle Size Reduction PDFDocument4 pagesLec Chapter 10 Particle Size Reduction PDFGNCDWNo ratings yet
- Research For ME ShopDocument37 pagesResearch For ME ShopGrace LuceroNo ratings yet
- 2446 E Manual de Parted CEDocument244 pages2446 E Manual de Parted CECarlos Montalvo100% (1)