Download as pdf or txt
You might also like
- ELECTRIC VEHICLE MODELLING WITH MATLAB-SIMULINK - Skill-LyncDocument16 pagesELECTRIC VEHICLE MODELLING WITH MATLAB-SIMULINK - Skill-LyncAmogh GirishNo ratings yet
- Lightning Arrester Circuit Breaker: Description Symbol Description SymbolDocument25 pagesLightning Arrester Circuit Breaker: Description Symbol Description Symbolpeter vanderNo ratings yet
- 4.working With Maxwell Projects and DesignDocument75 pages4.working With Maxwell Projects and DesignPrasenjit Wakode100% (3)
- Water Cooled Axial Flux Motor High TorqueDocument7 pagesWater Cooled Axial Flux Motor High TorqueSteven SullivanNo ratings yet
- Designing Transformer Slup265Document30 pagesDesigning Transformer Slup265Sheran ShahidNo ratings yet
- Motoranalysis-Pm: Design and Analysis of Permanent Magnet MachinesDocument107 pagesMotoranalysis-Pm: Design and Analysis of Permanent Magnet Machineslupillorivera9981No ratings yet
- Design and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainDocument7 pagesDesign and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainMC ANo ratings yet
- Design of Brushless Permanent Magnet Motor For Electric Vehicle ApplicationDocument55 pagesDesign of Brushless Permanent Magnet Motor For Electric Vehicle ApplicationDeepak sawNo ratings yet
- Electrical Machine DesignDocument8 pagesElectrical Machine DesignArvin TorrenteNo ratings yet
- Design of Synchronous MachinesDocument17 pagesDesign of Synchronous MachinesNiteshNarukaNo ratings yet
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- Modeling of The Solid Rotor Induction MotorDocument5 pagesModeling of The Solid Rotor Induction MotorIraqi stormNo ratings yet
- Machine Training PM Synchronous Ansoft MaxwellDocument111 pagesMachine Training PM Synchronous Ansoft MaxwellLatisha CarterNo ratings yet
- Project 1 Synchronous MachineDocument34 pagesProject 1 Synchronous MachineDivya Kumar SharmaNo ratings yet
- Switched Reluctance Motor (SRM)Document8 pagesSwitched Reluctance Motor (SRM)Ömer Faruk AbdullahNo ratings yet
- Ansys Electric Machines and Power ElectronicsDocument58 pagesAnsys Electric Machines and Power ElectronicsLatisha CarterNo ratings yet
- Sychronous M.Tech PDFDocument19 pagesSychronous M.Tech PDFGajendraPatelNo ratings yet
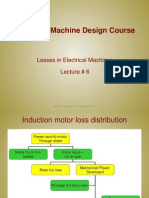
- Lecture6 - Losses in Electric MachinesDocument24 pagesLecture6 - Losses in Electric Machinesthulasi_krishnaNo ratings yet
- 2.review of Literature and Statement of ProblemDocument6 pages2.review of Literature and Statement of ProblemsheriabhiNo ratings yet
- Electrical SteelDocument193 pagesElectrical SteelpavanupadhyeNo ratings yet
- Lipo PDFDocument11 pagesLipo PDFjalilemadiNo ratings yet
- Transformer Design With Ferrite S 2013Document1 pageTransformer Design With Ferrite S 2013breakzNo ratings yet
- DC-DC ConverterDocument24 pagesDC-DC ConverterkandularanjithNo ratings yet
- Lecture13 - Stator Insulation System vs. Voltage & TemperatureDocument21 pagesLecture13 - Stator Insulation System vs. Voltage & Temperatureramaswamykama786No ratings yet
- Technical Reference: SubjectDocument18 pagesTechnical Reference: SubjectPeter DyckNo ratings yet
- Design of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerDocument3 pagesDesign of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerhooshyarNo ratings yet
- Electrical Machines 2Document328 pagesElectrical Machines 2Gyanesh GuptaNo ratings yet
- Geneva MechanismDocument12 pagesGeneva Mechanismsarodesarang4750No ratings yet
- EM Synchronous GeneratorDocument22 pagesEM Synchronous GeneratorDeepanshu SehgalNo ratings yet
- Ferrite Core Transformer Design Engineering and Technology 6Document10 pagesFerrite Core Transformer Design Engineering and Technology 6nedian_2006100% (2)
- Magneto Hydro Dynamic Systems PPT Presentation Way2project inDocument17 pagesMagneto Hydro Dynamic Systems PPT Presentation Way2project in123ramnar100% (1)
- Power Systems IIDocument66 pagesPower Systems IIsuresh2700% (1)
- Design of Inductors and High Frequency TransformersDocument6 pagesDesign of Inductors and High Frequency TransformersNiranjan kumarNo ratings yet
- ThesisDocument230 pagesThesisAbdelhalim Taieb BrahimNo ratings yet
- Basic SVPWMDocument6 pagesBasic SVPWMVAMSIKRISHNAEEENo ratings yet
- A Three-Phase Induction Motor ProblemDocument26 pagesA Three-Phase Induction Motor Problemowen674s100% (2)
- Concentrated Winding Axial Flux Permanent Magnet Motor With Plastic Bonded Magnets and Sintered Segmented MagnetsDocument5 pagesConcentrated Winding Axial Flux Permanent Magnet Motor With Plastic Bonded Magnets and Sintered Segmented MagnetsMostafa AhmadiNo ratings yet
- Synchronous Machine DesignDocument35 pagesSynchronous Machine DesignvietnhuNo ratings yet
- Power Distribution & UtilizationDocument104 pagesPower Distribution & UtilizationFurqan KhalidNo ratings yet
- BEE Assignment Unit 4Document13 pagesBEE Assignment Unit 4Abhishek RaoNo ratings yet
- EEE Suggestion: AC & DC CircuitDocument1 pageEEE Suggestion: AC & DC CircuitBIJOY CHOWDHURYNo ratings yet
- Dynamic Braking ResistorsDocument2 pagesDynamic Braking Resistorsjsrplc7952No ratings yet
- VHDL Synchronous CountersDocument28 pagesVHDL Synchronous CountersShanaka JayasekaraNo ratings yet
- Assignment 1Document2 pagesAssignment 1ramakrishnaprasad9080% (1)
- Ansoft Maxwell v12 2D User Guide-Machine Design Reference GuideDocument297 pagesAnsoft Maxwell v12 2D User Guide-Machine Design Reference GuideAndy Xiao100% (4)
- High Performance Cooling of Traction BrushlessDocument96 pagesHigh Performance Cooling of Traction BrushlessdftghsNo ratings yet
- 2012 Practical Strategies For Improved Cooling of Electrical Motors and Generators Dave Staton INDUCTICA TECHNICAL CONFERENCE PDFDocument8 pages2012 Practical Strategies For Improved Cooling of Electrical Motors and Generators Dave Staton INDUCTICA TECHNICAL CONFERENCE PDFuuur35No ratings yet
- Industrial Training Presentation On Regional Workshop of Upsrtc (Uttar Pradesh State Road Transport Corporation)Document18 pagesIndustrial Training Presentation On Regional Workshop of Upsrtc (Uttar Pradesh State Road Transport Corporation)Preet ChahalNo ratings yet
- Inverter PDFDocument84 pagesInverter PDFVenkedesh RNo ratings yet
- Voltage Source Inverter - 2Document99 pagesVoltage Source Inverter - 2dhamu66990% (1)
- Lecture Notes On SYNCHRONOUS GENERATORDocument72 pagesLecture Notes On SYNCHRONOUS GENERATORJeremiahNo ratings yet
- Synchronous Reluctance Motor Technology - Industrial Opprtunities, Challenges and Future DirectionDocument30 pagesSynchronous Reluctance Motor Technology - Industrial Opprtunities, Challenges and Future DirectionedumacerenNo ratings yet
- Voltage Shunt Feedback AmplifierDocument18 pagesVoltage Shunt Feedback AmplifierHimanshu Singh100% (1)
- ArticleDocument135 pagesArticlefarhan rajib100% (1)
- Course Plan-Power ElectronicsDocument5 pagesCourse Plan-Power ElectronicsNarasimman DonNo ratings yet
- 3 Point StarterDocument6 pages3 Point StartersuryavigneNo ratings yet
- Power Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersFrom EverandPower Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersNo ratings yet
- Research and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968From EverandResearch and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968No ratings yet
- Magneto-Resistive and Spin Valve Heads: Fundamentals and ApplicationsFrom EverandMagneto-Resistive and Spin Valve Heads: Fundamentals and ApplicationsNo ratings yet
- Inductance Measurements For Synchronous MachinesDocument2 pagesInductance Measurements For Synchronous MachinesYusuf YaşaNo ratings yet
- Design Criteria of High Performance Synchronous Reluctance MotorsDocument8 pagesDesign Criteria of High Performance Synchronous Reluctance MotorsYusuf YaşaNo ratings yet
- PDF 2Document1 pagePDF 2Yusuf YaşaNo ratings yet
- Design Criteria of High Performance Synchronous Reluctance MotorsDocument8 pagesDesign Criteria of High Performance Synchronous Reluctance MotorsYusuf YaşaNo ratings yet
- Toyota Prius OrnlDocument43 pagesToyota Prius OrnlYusuf YaşaNo ratings yet
- Toyota Prius OrnlDocument43 pagesToyota Prius OrnlYusuf YaşaNo ratings yet
- MC - HSSQ0701 - X Ray Technician - 14 11 2017Document44 pagesMC - HSSQ0701 - X Ray Technician - 14 11 2017Arun KumarNo ratings yet
- Siemens MPCB 3RV20214DA10 DatasheetDocument9 pagesSiemens MPCB 3RV20214DA10 DatasheetSreegith ChelattNo ratings yet
- Raphex Answers 2010Document15 pagesRaphex Answers 2010Ant MenNo ratings yet
- Evaluation Exam No. 1 - ManilaDocument8 pagesEvaluation Exam No. 1 - ManilaTaehyung KimNo ratings yet
- Cambridge IGCSE: Combined Science 0653/63Document16 pagesCambridge IGCSE: Combined Science 0653/63septina restuNo ratings yet
- MetrologyDocument639 pagesMetrologyranveerm100% (1)
- Diaphragm Walls: Design Manager, Cementation Skanska LimitedDocument18 pagesDiaphragm Walls: Design Manager, Cementation Skanska LimitedRoyalista LANo ratings yet
- Semiconductor Device Technology by Malcolm E. Goodge PDFDocument505 pagesSemiconductor Device Technology by Malcolm E. Goodge PDFelpatotas22No ratings yet
- Report Carbon Brush MotorDocument4 pagesReport Carbon Brush MotorLim ChsNo ratings yet
- Sinano Ja enDocument53 pagesSinano Ja enTrung kien NguyenNo ratings yet
- Module 4 Rapid Tooling and Reverse Engineering PDFDocument152 pagesModule 4 Rapid Tooling and Reverse Engineering PDFDiscord YtNo ratings yet
- Chapter-2 Sample Preparation AND TechniquesDocument24 pagesChapter-2 Sample Preparation AND TechniquesusamaNo ratings yet
- NTM Module 1Document19 pagesNTM Module 1RishiJpNo ratings yet
- PAM, PPM, PWM Modulation and Demodulation Trainer ST2110 LearningDocument67 pagesPAM, PPM, PWM Modulation and Demodulation Trainer ST2110 Learningchemavalencia100% (2)
- Physics Paper 1 TZ1 HLDocument21 pagesPhysics Paper 1 TZ1 HLSparsh BothraNo ratings yet
- N2 Welders' Theory November 2020Document7 pagesN2 Welders' Theory November 2020Markus VlamNo ratings yet
- Point by Point CalculationDocument14 pagesPoint by Point CalculationJoshua OchabilloNo ratings yet
- James Maynard We Discuss Various Recent Advances On Weak Forms of The Twin Prime ConjectureDocument29 pagesJames Maynard We Discuss Various Recent Advances On Weak Forms of The Twin Prime ConjectureAn SơnNo ratings yet
- My Seminar ReportDocument24 pagesMy Seminar ReportAshish AgarwalNo ratings yet
- IPM STD 3 - Mega 2020Document2 pagesIPM STD 3 - Mega 2020a modi100% (1)
- Yu 2017Document10 pagesYu 2017Ehsan AbarghooeiNo ratings yet
- COMSOL Conference 2013Document1 pageCOMSOL Conference 2013Anthony Val CamposanoNo ratings yet
- Emco e 300Document1 pageEmco e 300robalitojgpNo ratings yet
- Conveyor Oven Gemini Model DZ55II With Menu SelectDocument2 pagesConveyor Oven Gemini Model DZ55II With Menu SelectZaighaum RanaNo ratings yet
- SFP CalculationDocument6 pagesSFP CalculationMohammad IsmailNo ratings yet
- IPC-4554-2005 浸没镀锡印刷电路板规范Document18 pagesIPC-4554-2005 浸没镀锡印刷电路板规范ttNo ratings yet
- Kinetic Molecular Theory PPTDocument29 pagesKinetic Molecular Theory PPTNanami MumuzunoNo ratings yet
- IGS-M-PL-027 (0) 1388 : ApprovedDocument9 pagesIGS-M-PL-027 (0) 1388 : ApprovedMamadNo ratings yet
- 4.12 ETH CableDocument4 pages4.12 ETH CableadinugrohoNo ratings yet