Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Principles of Vibration (2nd Edition) - Tongue, Benson H.-Oxford University Press (2002)Document388 pagesPrinciples of Vibration (2nd Edition) - Tongue, Benson H.-Oxford University Press (2002)arnauilla80% (5)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Non Circular Air Cooler Design CalculationsDocument50 pagesNon Circular Air Cooler Design CalculationsSyedZainAliNo ratings yet
- FinalAcetic Anhydride ProductionDocument15 pagesFinalAcetic Anhydride ProductionSwarnim Raj100% (2)
- University of Cambridge International Examinations General Certificate of Education Advanced Subsidiary Level and Advanced LevelDocument4 pagesUniversity of Cambridge International Examinations General Certificate of Education Advanced Subsidiary Level and Advanced LevelAMINA ATTANo ratings yet
- Extraction and Isolation of Caffeine From Ground Coffee BeansDocument5 pagesExtraction and Isolation of Caffeine From Ground Coffee BeansRemjohn Magtaas100% (1)
- Hydromhan1Cs: Coefficients For International Towing Tank Conference 1957 Model-Ship Correlation UneDocument21 pagesHydromhan1Cs: Coefficients For International Towing Tank Conference 1957 Model-Ship Correlation UneAldiansyah FahmiNo ratings yet
- WEG Mvw01 Medium Voltage Drive 50019088 Brochure EnglishDocument32 pagesWEG Mvw01 Medium Voltage Drive 50019088 Brochure Englishsykimk8921No ratings yet
- Spec (1) .11 KV Rocking Type Tpgo IsolatorDocument7 pagesSpec (1) .11 KV Rocking Type Tpgo Isolatorarindam90No ratings yet
- Chapter 7 (Acids & Bases)Document15 pagesChapter 7 (Acids & Bases)amin_zamanNo ratings yet
- Geometrical TolerancingDocument12 pagesGeometrical TolerancingItalo Venegas100% (1)
- Experiment No. 15: Zener DiodeDocument2 pagesExperiment No. 15: Zener DiodeSatyam TripãthìNo ratings yet
- Passive Solar Architecture PRDocument1 pagePassive Solar Architecture PRChelsea Green PublishingNo ratings yet
- Philips Industry Lighting BrochureDocument39 pagesPhilips Industry Lighting Brochureuriquil006No ratings yet
- Lyceum of The Philippines University: Enrollment Assessment FormDocument1 pageLyceum of The Philippines University: Enrollment Assessment FormVann channelNo ratings yet
- Lesson 5 T-BeamsDocument7 pagesLesson 5 T-BeamsJoshua John JulioNo ratings yet
- Discover Freefall System Manual ME 9889 PDFDocument10 pagesDiscover Freefall System Manual ME 9889 PDFJulenNo ratings yet
- 50 Solutions of Mercury's PerihelionDocument24 pages50 Solutions of Mercury's PerihelionYousef Nahhas100% (1)
- Soal SoalDocument8 pagesSoal SoalJakaAbuNo ratings yet
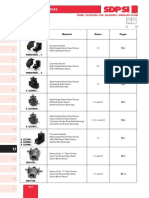
- 12 - Right Angle Drives: Catalog Series Material Pages RatiosDocument16 pages12 - Right Angle Drives: Catalog Series Material Pages RatiosODG_290473No ratings yet
- Application of Numerical MethodsDocument7 pagesApplication of Numerical MethodsMd Saidur Rahman Kohinoor100% (1)
- Synthetic Polymers NotesDocument3 pagesSynthetic Polymers NotesajspspNo ratings yet
- Meterial and Energy BalanceDocument12 pagesMeterial and Energy BalancesureshNo ratings yet
- 10 Science Notes 10 Light Reflection and Refraction 1Document18 pages10 Science Notes 10 Light Reflection and Refraction 1Anonymous loKgur100% (1)
- Che 561Document21 pagesChe 561Florence IrhibhogbeNo ratings yet
- D4.1 Simulation ModelsDocument10 pagesD4.1 Simulation ModelsAbd Muhaimin AmmsNo ratings yet
- Snubberless™ and Logic Level TRIAC Behavior at Turn-OffDocument16 pagesSnubberless™ and Logic Level TRIAC Behavior at Turn-OffCristiano BruschiniNo ratings yet
- VGB PowerTech 10 2001 Evaluating The Condition and Remaining Life of Older Power PlantsDocument4 pagesVGB PowerTech 10 2001 Evaluating The Condition and Remaining Life of Older Power PlantsmatthewpincottNo ratings yet
- 2018 MULTI V CatalogueDocument146 pages2018 MULTI V CatalogueSaviour UdoNo ratings yet
- 6.02 Fall 2012 Lecture #12: - Bounded-Input, Bounded-Output Stability - Frequency ResponseDocument16 pages6.02 Fall 2012 Lecture #12: - Bounded-Input, Bounded-Output Stability - Frequency ResponseKarthik KichuNo ratings yet