Download as pdf or txt
You might also like
- Jelly2 User - Manual - V1.0 20201130 PDFDocument113 pagesJelly2 User - Manual - V1.0 20201130 PDFTamNo ratings yet
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 4 out of 5 stars4/5 (4)
- The Conversion of A Hybrid Electric Vehicle Into A Plug in Hybrid Electric VehicleDocument10 pagesThe Conversion of A Hybrid Electric Vehicle Into A Plug in Hybrid Electric VehicleEmanuel PopaNo ratings yet
- Kendall SCD Express Controller Operation Service GuideDocument55 pagesKendall SCD Express Controller Operation Service GuideSwami MeeraNo ratings yet
- Reporte de Inversor PIC16f87XDocument42 pagesReporte de Inversor PIC16f87XReynaldo MartinezNo ratings yet
- Design and Simulation of DC DC Boost ConverterDocument11 pagesDesign and Simulation of DC DC Boost ConverterHãrshã SmîlęýNo ratings yet
- Thesis On Boost ConverterDocument31 pagesThesis On Boost ConverterArpan SahaNo ratings yet
- Simulation and Experimental Analysis of Hybrid DC-DC Converter For Electric Vehicle ApplicationsDocument10 pagesSimulation and Experimental Analysis of Hybrid DC-DC Converter For Electric Vehicle ApplicationspremsonyNo ratings yet
- Regulated Output Voltage Double Switch Buck-Boost Converter For Photovoltaic Energy ApplicationDocument11 pagesRegulated Output Voltage Double Switch Buck-Boost Converter For Photovoltaic Energy ApplicationEduardo Cairolli de NovaesNo ratings yet
- DCto DCBoost Converterusing 555 Timer ICDocument7 pagesDCto DCBoost Converterusing 555 Timer ICengpower20m196No ratings yet
- An Advanced Two Level Double Dual Boost ConverterDocument5 pagesAn Advanced Two Level Double Dual Boost ConverterGRD JournalsNo ratings yet
- CHAPTER ThreeDocument20 pagesCHAPTER ThreeAung MyatNo ratings yet
- High Efficiency DC-DC Boost Converter Design For LED DrivesDocument10 pagesHigh Efficiency DC-DC Boost Converter Design For LED DriveskowsalyaNo ratings yet
- Design and Implementation of 12V/24V Closed Loop Boost Converter For Solar Powered LED Lighting SystemDocument11 pagesDesign and Implementation of 12V/24V Closed Loop Boost Converter For Solar Powered LED Lighting Systemسعيد ابوسريعNo ratings yet
- Design Cicuit Power Electronic by PSIMDocument14 pagesDesign Cicuit Power Electronic by PSIMTrương Văn TrọngNo ratings yet
- MPPT Based Optimal Charge Controller in PV SystemDocument27 pagesMPPT Based Optimal Charge Controller in PV SystemMalik SameeullahNo ratings yet
- Bi-Directional Battery Management SystemDocument28 pagesBi-Directional Battery Management SystemAjit NarwalNo ratings yet
- Battery Charger Using Bicycle: 1 Problem StatementDocument14 pagesBattery Charger Using Bicycle: 1 Problem Statementbenny bullNo ratings yet
- Design and Simulation of DC-DC Converter Used in Solar Charge ControllersDocument4 pagesDesign and Simulation of DC-DC Converter Used in Solar Charge ControllersInternational Journal of Engineering Inventions (IJEI)No ratings yet
- Design and Implementation of Hybrid Energy Storage System ......Document8 pagesDesign and Implementation of Hybrid Energy Storage System ......GALLEGO LUPIANEZNo ratings yet
- Hybrid InverterDocument34 pagesHybrid InverterPrem KumarNo ratings yet
- DC Chop - Final ReportDocument36 pagesDC Chop - Final ReportReeta DuttaNo ratings yet
- A Remote Electricity Billing SystemDocument9 pagesA Remote Electricity Billing SystemHemant PatelNo ratings yet
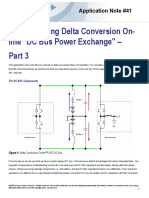
- APC - Understanding Delta Conversion Part3Document6 pagesAPC - Understanding Delta Conversion Part3bui van trinhNo ratings yet
- Analysis of Energy Management Using PI Logic Controller Technique For Supercapacitor ApplicationsDocument8 pagesAnalysis of Energy Management Using PI Logic Controller Technique For Supercapacitor ApplicationsLIEW HUI FANG UNIMAPNo ratings yet
- UTBCDocument65 pagesUTBCSylvester Delali DordziNo ratings yet
- Batch 10Document68 pagesBatch 10Pidikiti Surendra BabuNo ratings yet
- Changing From CH: - Traditional Charging TechniquesDocument2 pagesChanging From CH: - Traditional Charging Techniquesภูเก็ต เป็นเกาะNo ratings yet
- Power Electronics For Renewable Energy SystemsDocument33 pagesPower Electronics For Renewable Energy SystemssrilakshmisiriNo ratings yet
- Project (Rubric-1) : March, 2023Document11 pagesProject (Rubric-1) : March, 2023AakankshaNo ratings yet
- Design of A 10 KW InverterDocument52 pagesDesign of A 10 KW Inverterguddu13481100% (1)
- A Better Uninterruptible Power Supply (UPS) by Jason Fontaine Jon Rasmussen ECE 345 Jon Benson (T.A.) December 7, 1999 Project #16Document19 pagesA Better Uninterruptible Power Supply (UPS) by Jason Fontaine Jon Rasmussen ECE 345 Jon Benson (T.A.) December 7, 1999 Project #16Papi AkoiNo ratings yet
- Solar Water Pump Using BLDC Motor Drive With High Gain DC DC Converter IJERTCONV9IS13040Document4 pagesSolar Water Pump Using BLDC Motor Drive With High Gain DC DC Converter IJERTCONV9IS13040Prakash Kumar RayNo ratings yet
- Fuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Document6 pagesFuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Dhammunodu MlaNo ratings yet
- 1 PB PDFDocument9 pages1 PB PDFIfan Seven SeasNo ratings yet
- Multiport DC-DC Converter For Power Management of Multiple Renewable Energy SourcesDocument4 pagesMultiport DC-DC Converter For Power Management of Multiple Renewable Energy SourcesRasika PujareNo ratings yet
- Design Bi-Directional Charger For Phev Application: Chaudhari Tejal A., Bariya Chetan K., Upadhyay Chetan DDocument6 pagesDesign Bi-Directional Charger For Phev Application: Chaudhari Tejal A., Bariya Chetan K., Upadhyay Chetan Dmohd786azharNo ratings yet
- High Efficient Asynchronous Buck Converter For Biomedical DevicesDocument7 pagesHigh Efficient Asynchronous Buck Converter For Biomedical DevicesresearchinventyNo ratings yet
- Control of Battery Charger For Electric VehiclesDocument6 pagesControl of Battery Charger For Electric VehiclesIjaems JournalNo ratings yet
- PV FED Interleaved Boost Converter For BLDC MotorDocument8 pagesPV FED Interleaved Boost Converter For BLDC MotorIJRASETPublicationsNo ratings yet
- Renewable Energy Powered Dual Battery Charging in Electric VehicleDocument6 pagesRenewable Energy Powered Dual Battery Charging in Electric VehicleSiva ForeviewNo ratings yet
- Aqw PDFDocument5 pagesAqw PDFnjmnjkNo ratings yet
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurDocument6 pagesOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraNo ratings yet
- Analysis of Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC ConverterDocument10 pagesAnalysis of Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC ConverterMagpie 2023No ratings yet
- Design OF BUCK BOOST CONVERTERDocument11 pagesDesign OF BUCK BOOST CONVERTERmithunprayagNo ratings yet
- Implementation of High Power DC-DC Converter and Speed Control of DC Motor Using DSPDocument9 pagesImplementation of High Power DC-DC Converter and Speed Control of DC Motor Using DSPJosé GonzálezNo ratings yet
- Report On Power SupplyDocument16 pagesReport On Power SupplyKshitij GuptaNo ratings yet
- Jennifer New Project (Correction)Document25 pagesJennifer New Project (Correction)HASTINGS EMURASHENo ratings yet
- Analysis and Design of DC-DC/AC Non Isolated Cuk Converter Using Sliding Mode ControllerDocument8 pagesAnalysis and Design of DC-DC/AC Non Isolated Cuk Converter Using Sliding Mode ControllerHitakshi GuptaNo ratings yet
- A New Controller Scheme For Photovoltaics PowerDocument10 pagesA New Controller Scheme For Photovoltaics PowerHakan PolatkanNo ratings yet
- Area-Saving and High-Efficiency RGB LED Driver WitDocument12 pagesArea-Saving and High-Efficiency RGB LED Driver WitHoracio DorantesNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument15 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsMioara RoscaNo ratings yet
- MPPT Controller Based Solar Power Generation UsingDocument9 pagesMPPT Controller Based Solar Power Generation UsingHarith HaikalNo ratings yet
- Project SynopsisDocument6 pagesProject SynopsisDeepakVyas0% (1)
- Buck Boost ConverterDocument5 pagesBuck Boost ConverterZhang EnjuneNo ratings yet
- Introduction To Portable Charger Circuits For Electronic Appliances and Uninterruptible Power Supply.Document3 pagesIntroduction To Portable Charger Circuits For Electronic Appliances and Uninterruptible Power Supply.Omor Hasan Al BoshirNo ratings yet
- Power Management - Battery Charger With Cell-Balancing and Fuel Gauge Function SupportDocument13 pagesPower Management - Battery Charger With Cell-Balancing and Fuel Gauge Function SupportToni BioscaNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Bootstrap Diode: ExplanationDocument6 pagesBootstrap Diode: ExplanationKidus DawitNo ratings yet
- Capacitors in Electric Drive ApplicationDocument38 pagesCapacitors in Electric Drive ApplicationKidus DawitNo ratings yet
- Different Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesDocument7 pagesDifferent Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesKidus DawitNo ratings yet
- Battery Charging Guide - 6 VoltDocument5 pagesBattery Charging Guide - 6 VoltKidus DawitNo ratings yet
- BootstrapDocument11 pagesBootstrapKidus DawitNo ratings yet
- PMBLDC-Simulink - Permanent Magnet Brushless DC Motor Simulink Model.Document5 pagesPMBLDC-Simulink - Permanent Magnet Brushless DC Motor Simulink Model.Kidus DawitNo ratings yet
- Tutorial - HEV Design SuiteDocument13 pagesTutorial - HEV Design SuiteKidus DawitNo ratings yet
- Combustion Data Acquisition and Analysis: Department of Aeronautical and Automotive EngineeringDocument75 pagesCombustion Data Acquisition and Analysis: Department of Aeronautical and Automotive EngineeringKidus DawitNo ratings yet
- Flywheel Energy and Power Storage Systems: Bjo RN Bolund, Hans Bernhoff, Mats LeijonDocument24 pagesFlywheel Energy and Power Storage Systems: Bjo RN Bolund, Hans Bernhoff, Mats LeijonKidus DawitNo ratings yet
- 12V100Ah 4S7P OC100A Cell32135Document10 pages12V100Ah 4S7P OC100A Cell32135Koffi LetsouNo ratings yet
- Op Manual TLU600 EngDocument20 pagesOp Manual TLU600 EngSoresicaNo ratings yet
- Ulefone Armor 22Document43 pagesUlefone Armor 22Zoltán TörökNo ratings yet
- Motorola W375Document81 pagesMotorola W375kor_m8No ratings yet
- Shital Chemical Industries:-Electrical Department: Checklist For UpsDocument2 pagesShital Chemical Industries:-Electrical Department: Checklist For UpsInstrument SCINo ratings yet
- Massage Gun Ebook PDFDocument7 pagesMassage Gun Ebook PDFhamza 4266No ratings yet
- 1.3-2.0t A Series 3-W Electric ForkliftDocument4 pages1.3-2.0t A Series 3-W Electric Forkliftkraiem naoufelNo ratings yet
- IEA G20 Hydrogen Report: AssumptionsDocument14 pagesIEA G20 Hydrogen Report: Assumptionspragya89No ratings yet
- Automotive Motorsport MSC Group Project 23 - 7Document2 pagesAutomotive Motorsport MSC Group Project 23 - 7Micheal AshwanthNo ratings yet
- Development of Solar Powered Mobile Power Bank System With LED LightDocument74 pagesDevelopment of Solar Powered Mobile Power Bank System With LED LightPatrick Lorenz R. ReyesNo ratings yet
- Radioshack Charger InstructionsDocument4 pagesRadioshack Charger Instructionsngt881No ratings yet
- Gasless Trimmer: Instruction ManualDocument42 pagesGasless Trimmer: Instruction ManualjNo ratings yet
- Grupos Electronicos Diesel Cat c15 410ekw Prime LowbsfcDocument6 pagesGrupos Electronicos Diesel Cat c15 410ekw Prime LowbsfcKeivinMCNo ratings yet
- How To Build Your Own Uninterruptible Power SupplyDocument17 pagesHow To Build Your Own Uninterruptible Power Supplymaster chibukingNo ratings yet
- Design and Implementation of A 12v Automatic Battery ChargerDocument3 pagesDesign and Implementation of A 12v Automatic Battery ChargerGideon samsonNo ratings yet
- 2 057 PDFDocument16 pages2 057 PDFManny AnacletoNo ratings yet
- ThesisDocument8 pagesThesisErica FaithNo ratings yet
- 48v 250w High Speed Hub Motor Kit Alter Lithium Phosphate Battery Lithium Charger Hub Full SetDocument22 pages48v 250w High Speed Hub Motor Kit Alter Lithium Phosphate Battery Lithium Charger Hub Full SetStudyNo ratings yet
- Battery 1 Checklist and ReportDocument10 pagesBattery 1 Checklist and ReportNaveedNo ratings yet
- Operating Instructions: KX-TG5621Document56 pagesOperating Instructions: KX-TG5621MazeTechieNo ratings yet
- Vibration Test Procedure 2.3Document10 pagesVibration Test Procedure 2.3Georgino SilvaNo ratings yet
- Mx1Cal: MX1 System Design Calculation ToolDocument9 pagesMx1Cal: MX1 System Design Calculation ToolHASEEB FAYYAZ ABBASINo ratings yet
- KH 967 Universal Battery Charger: Operating ManualDocument10 pagesKH 967 Universal Battery Charger: Operating ManualchaparipNo ratings yet
- Manual Book PS 16n-Bpt002enDocument81 pagesManual Book PS 16n-Bpt002enMuhammad KhalidNo ratings yet
- Physiogard TM / Cs 910: The Universal Monitoring SystemDocument6 pagesPhysiogard TM / Cs 910: The Universal Monitoring SystemRomuald Eric TefongNo ratings yet
- LTC4162 LDocument52 pagesLTC4162 Lmar_barudjNo ratings yet
- DSE5103datasheet PDFDocument2 pagesDSE5103datasheet PDFabduallah muhammadNo ratings yet