Download as pdf or txt
You might also like
- Fleet Maintenance-Tyre ManagementDocument17 pagesFleet Maintenance-Tyre ManagementNeulers0% (1)
- PPT-5 - Wind Energy - Unit-3Document25 pagesPPT-5 - Wind Energy - Unit-3avinashNo ratings yet
- Load Test On Three Phase Induction Motor: Experiment No: 1Document4 pagesLoad Test On Three Phase Induction Motor: Experiment No: 1Bodhayan PrasadNo ratings yet
- Sreekavithaengineerig College: Scott Connection of TransformersDocument4 pagesSreekavithaengineerig College: Scott Connection of Transformersmandadi_saileshNo ratings yet
- Direct - Indirect - Regenerative Method of TestingDocument29 pagesDirect - Indirect - Regenerative Method of TestingASHIM KUMAR SAHUNo ratings yet
- PROJCTDocument32 pagesPROJCTSwati Agarwal100% (1)
- Gujarat Technological University: Introduction To Electric VehicleDocument3 pagesGujarat Technological University: Introduction To Electric VehicleKRISHNANo ratings yet
- Transformers and AlternatorsDocument20 pagesTransformers and Alternatorsamrutha cNo ratings yet
- Sinusoidal PMAC Motor - 6th AprilDocument4 pagesSinusoidal PMAC Motor - 6th AprilSourav KumarNo ratings yet
- Solar Power Train With Automatic Crossing Gates: Project Report OnDocument56 pagesSolar Power Train With Automatic Crossing Gates: Project Report OnAvinash Chimkar100% (1)
- Essential Components of Indicating InstrumentsDocument6 pagesEssential Components of Indicating InstrumentsHina AsifNo ratings yet
- of PWM DC MotorDocument21 pagesof PWM DC Motorabhay_131250% (4)
- EDC Solar and Battery Powered DrivesDocument20 pagesEDC Solar and Battery Powered DrivesAnonymous xaeuoo4No ratings yet
- Index: Bandel Thermal Power Station Project Report 2009-2010Document46 pagesIndex: Bandel Thermal Power Station Project Report 2009-2010Debaditya Nath100% (1)
- Seminar Report FinalDocument28 pagesSeminar Report Finalgokul_iyer200150% (6)
- Lec 1 Unit 3 NasDocument21 pagesLec 1 Unit 3 NasRIYA SHARMANo ratings yet
- A Seminar Report: Flexible Ac Transmission SystemDocument13 pagesA Seminar Report: Flexible Ac Transmission SystemKali Charan Pradhan0% (1)
- Wind DieselDocument21 pagesWind Dieselchandrahas aryan0% (2)
- Ditribution SystemDocument17 pagesDitribution SystemPRITAM RAJNo ratings yet
- Optimal PlacementDocument21 pagesOptimal PlacementSunnyJoelNo ratings yet
- Construction and Working of Brushless DC PDFDocument12 pagesConstruction and Working of Brushless DC PDFaswardi8756No ratings yet
- A Report On The "3-Phase Line Fault Detector" Ee344 Minor Project - IDocument34 pagesA Report On The "3-Phase Line Fault Detector" Ee344 Minor Project - IDhruv PatelNo ratings yet
- PSOC Unit 2 - Reactive Power ControlDocument79 pagesPSOC Unit 2 - Reactive Power Controlvishal kambleNo ratings yet
- Unit Iii TransformersDocument55 pagesUnit Iii TransformersN Mohammed ZubairNo ratings yet
- Major Project 2 (Faults in Transmission Line)Document31 pagesMajor Project 2 (Faults in Transmission Line)Khaja SameeduddinNo ratings yet
- Electrical Engineering Project Ideas - Projects & SeminarsDocument13 pagesElectrical Engineering Project Ideas - Projects & SeminarsragvshahNo ratings yet
- Literature SurveyDocument7 pagesLiterature SurveyifyNo ratings yet
- EM - Solutions To Question Bank 2022-23Document53 pagesEM - Solutions To Question Bank 2022-23Kubera U100% (2)
- Week 1 Assignment 1 AnswersDocument3 pagesWeek 1 Assignment 1 AnswersSivaprasad GanjiNo ratings yet
- BLDC Motor Driven Solar PV Array Fed Water PumpingDocument26 pagesBLDC Motor Driven Solar PV Array Fed Water PumpingKarthik DmNo ratings yet
- Final v2g and g2v ReportDocument25 pagesFinal v2g and g2v Reportsuman shahNo ratings yet
- S124-Solar Based Mobile Charger For Rural AreasDocument4 pagesS124-Solar Based Mobile Charger For Rural AreasYellaturi Siva Kishore ReddyNo ratings yet
- Eeeviews: Unit Iv Synchronous Motor DrivesDocument26 pagesEeeviews: Unit Iv Synchronous Motor Driveskrithikgokul selvamNo ratings yet
- Transistor at Low FrequenciesDocument40 pagesTransistor at Low Frequenciesjoydeep12100% (1)
- Four Quadrant DC Motor Speed Control With MicrocontrollerDocument3 pagesFour Quadrant DC Motor Speed Control With MicrocontrollerLEAF servicesNo ratings yet
- A Report On Mosfet BasedDocument30 pagesA Report On Mosfet Baseddinesh23723100% (1)
- BEE CO PO Mapping 2018 ExternalQPDocument1 pageBEE CO PO Mapping 2018 ExternalQPLeela KrishnaNo ratings yet
- Induction Motor Interview Questions Answers: AnswerDocument2 pagesInduction Motor Interview Questions Answers: AnswerMuhammad Ali Khan AwanNo ratings yet
- DR BU Static Rotor Resistance ControlDocument4 pagesDR BU Static Rotor Resistance ControlSameer GulshanNo ratings yet
- Elrctic Traction: Requirements of An Ideal Traction SystemDocument17 pagesElrctic Traction: Requirements of An Ideal Traction SystemShrestha Sanju100% (1)
- Automatic Power Factor ControlDocument31 pagesAutomatic Power Factor ControlRAHUL100% (2)
- Question Bank (I-Scheme) : Bharati Vidyapeeth Institute of TechnologyDocument3 pagesQuestion Bank (I-Scheme) : Bharati Vidyapeeth Institute of Technology52. YASHRAJ RANSHURNo ratings yet
- Electric Traction - (9144)Document6 pagesElectric Traction - (9144)mahmodNo ratings yet
- Output Equation of DC Machines.Document5 pagesOutput Equation of DC Machines.srinimeha@gmail.com0% (1)
- Unit 3 APPARATUS PROTECTION (Switchgear and Protection)Document17 pagesUnit 3 APPARATUS PROTECTION (Switchgear and Protection)sujith100% (1)
- Power Electronics in Wind and Solar System-Sample-Question-Paper (Msbte-Study-Resources) PDFDocument4 pagesPower Electronics in Wind and Solar System-Sample-Question-Paper (Msbte-Study-Resources) PDFRevati KalalNo ratings yet
- Unit 2 Electromagnetic Relays (Switchgear and Protection)Document91 pagesUnit 2 Electromagnetic Relays (Switchgear and Protection)sujithNo ratings yet
- Seminar Report On Brushless DC MotorDocument13 pagesSeminar Report On Brushless DC MotorDev Kumar50% (2)
- Electrical Machines and Drives Year Question PaperDocument2 pagesElectrical Machines and Drives Year Question PapersivaeinfoNo ratings yet
- Part BDocument10 pagesPart BVenkat ManiNo ratings yet
- Sources and Sinks of Reactive PowerDocument2 pagesSources and Sinks of Reactive Powershukla dhavalNo ratings yet
- Bhel - CNC MachinesDocument60 pagesBhel - CNC MachinesAggyapal Singh JimmyNo ratings yet
- PERES - Unit-4Document27 pagesPERES - Unit-4sraj_4uNo ratings yet
- HVP - Notes Unit 1.3 Conventional Vehicle PerformanceDocument12 pagesHVP - Notes Unit 1.3 Conventional Vehicle PerformanceDevansh SrivastavaNo ratings yet
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelDocument7 pagesSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiNo ratings yet
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- Simulation of Indirect Field-Oriented Induction Motor Drive SystemDocument12 pagesSimulation of Indirect Field-Oriented Induction Motor Drive SystemThinseepNo ratings yet
- Paper Title: Ajay Kumar Gudla and Saikat ChakrabartiDocument5 pagesPaper Title: Ajay Kumar Gudla and Saikat ChakrabartiAshutosh KumarNo ratings yet
- Speed Control OF WIND TURBINEDocument4 pagesSpeed Control OF WIND TURBINESHADDOWWNo ratings yet
- Speed Control of Switched Reluctance Motor-LibreDocument9 pagesSpeed Control of Switched Reluctance Motor-LibreIndrajithSrNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- 2x600 MW CHP, Damodar Valley Corporation, Raghunathpur (W.B)Document1 page2x600 MW CHP, Damodar Valley Corporation, Raghunathpur (W.B)Alind DubeyNo ratings yet
- 1234Document1 page1234Alind DubeyNo ratings yet
- Hindustan Petroleum Corporation Limited: Thank You For Visiting HPCL Job Site.Document1 pageHindustan Petroleum Corporation Limited: Thank You For Visiting HPCL Job Site.Alind DubeyNo ratings yet
- ReceiptDocument1 pageReceiptAlind DubeyNo ratings yet
- Analog Circuits Design: Electronics Club, IIT KanpurDocument11 pagesAnalog Circuits Design: Electronics Club, IIT KanpurAlind DubeyNo ratings yet
- Testing of Power TransformersDocument30 pagesTesting of Power TransformersAlind Dubey100% (2)
- Ies SyllabusBooks For IesDocument2 pagesIes SyllabusBooks For IesAlind DubeyNo ratings yet
- Engineer Trainee 2013-14 Gen: BHELDocument3 pagesEngineer Trainee 2013-14 Gen: BHELAlind DubeyNo ratings yet
- Rohtak1 Opt 2Document1 pageRohtak1 Opt 2Alind DubeyNo ratings yet
- Ida OdaDocument3 pagesIda OdaAlind DubeyNo ratings yet
- ResumeDocument3 pagesResumeAlind DubeyNo ratings yet
- Technical Data Book of NGRDocument54 pagesTechnical Data Book of NGRAlind Dubey0% (1)
- Bus Bar and LBB Protection PDFDocument33 pagesBus Bar and LBB Protection PDFAlind Dubey100% (5)
- ESE Online Test Series: 2015 Conventional Paper: Ee: Electrical EngineeringDocument4 pagesESE Online Test Series: 2015 Conventional Paper: Ee: Electrical EngineeringAlind DubeyNo ratings yet
- Inspection Test Procedure ModelDocument8 pagesInspection Test Procedure ModelMahesh SuthaNo ratings yet
- Non-Negative Matrix Factorization (NMF) : Benjamin WilsonDocument43 pagesNon-Negative Matrix Factorization (NMF) : Benjamin Wilsonprjet1 fsm1No ratings yet
- ACS712 DatasheetDocument15 pagesACS712 DatasheetwirawansatriaNo ratings yet
- Intake-Air System (ZM)Document13 pagesIntake-Air System (ZM)Sebastian SirventNo ratings yet
- PGG-EG Governor ActuatorDocument4 pagesPGG-EG Governor Actuatorrodruren010% (1)
- Salesforce Workflow CheatsheetDocument4 pagesSalesforce Workflow Cheatsheetgowtham 099091No ratings yet
- Topographic Map of GillettDocument1 pageTopographic Map of GillettHistoricalMapsNo ratings yet
- What Is Cloud ComputingDocument21 pagesWhat Is Cloud ComputinganilkarriiNo ratings yet
- 9.3 Standards and ReferencesDocument6 pages9.3 Standards and ReferencesAfshadNo ratings yet
- Canopy Install TipsDocument1 pageCanopy Install Tipsengine wangNo ratings yet
- The Sproutling Baby Monitor Keep Tabs On Your Newborn With This Smart Ankle BraceletDocument2 pagesThe Sproutling Baby Monitor Keep Tabs On Your Newborn With This Smart Ankle BraceletAllanStevenNo ratings yet
- Subtopic 6.5-6.7 FORM 4 KSSM 2020Document32 pagesSubtopic 6.5-6.7 FORM 4 KSSM 2020NurulNo ratings yet
- SOP-T-0005 - Standard Operating (Test) Procedure - CUBE TESTDocument18 pagesSOP-T-0005 - Standard Operating (Test) Procedure - CUBE TESTAvidip DeyNo ratings yet
- ENGDocument28 pagesENGTamil Selvan100% (1)
- Coal Conveyor Belt Fault DetectionDocument4 pagesCoal Conveyor Belt Fault Detectionc pawarNo ratings yet
- Pompa Sirkulasi AP 156,3 LPM @60mDocument3 pagesPompa Sirkulasi AP 156,3 LPM @60mAndreas B KresnawanNo ratings yet
- MID 185 - PSID 3 - FMI 8 Renault VolvoDocument3 pagesMID 185 - PSID 3 - FMI 8 Renault VolvolampardNo ratings yet
- Suspension SystemDocument11 pagesSuspension SystemARUNSFRHNo ratings yet
- Lathe DesignDocument11 pagesLathe DesignShiyas Basheer0% (1)
- Arson Invest 2Document100 pagesArson Invest 2Harrison sajorNo ratings yet
- BCS 051 Solved AssignmentsDocument11 pagesBCS 051 Solved AssignmentsAmit GuptaNo ratings yet
- Datasheet LG-ICR18650D1 PDFDocument9 pagesDatasheet LG-ICR18650D1 PDFPedro Militao CoboNo ratings yet
- Kone3000S Minispace™Scenic Car Technical Information For SalesDocument11 pagesKone3000S Minispace™Scenic Car Technical Information For SalesYaşar EKNo ratings yet
- Truck Unloading Station111Document4 pagesTruck Unloading Station111ekrem0867No ratings yet
- PBA Therm Clad BrochureDocument2 pagesPBA Therm Clad BrochureJames DickinsonNo ratings yet
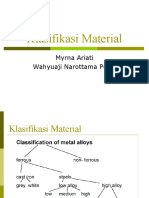
- Klasifikasi Material: Myrna Ariati Wahyuaji Narottama PutraDocument49 pagesKlasifikasi Material: Myrna Ariati Wahyuaji Narottama Putrachink07No ratings yet
- 6292A: Installing and Configuring Windows® 7 Client Microsoft® Hyper-V Classroom Setup GuideDocument14 pages6292A: Installing and Configuring Windows® 7 Client Microsoft® Hyper-V Classroom Setup GuideMichael DavisNo ratings yet
- Manual Conefor 26Document19 pagesManual Conefor 26J. Francisco Lavado ContadorNo ratings yet
- Ultra Power Acb User ManualDocument138 pagesUltra Power Acb User ManualRaj KumarNo ratings yet