
10 Electromotoric Actuators For Double Clutch Transmissions
10 Electromotoric Actuators For Double Clutch Transmissions
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- Full Download Ebook Ebook PDF Microbiology With Diseases by Taxonomy 5th Edition PDFDocument40 pagesFull Download Ebook Ebook PDF Microbiology With Diseases by Taxonomy 5th Edition PDFmicheal.cooper97498% (42)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Service Manual: © MARCH 2016, Mercury Marine. All Rights Reserved. 90-8M0107213Document94 pagesService Manual: © MARCH 2016, Mercury Marine. All Rights Reserved. 90-8M0107213fabianoNo ratings yet
- Maptek I-Site Studio Geotechnical ModuleDocument4 pagesMaptek I-Site Studio Geotechnical ModulekennycasillaNo ratings yet
- BPT Targha Instalation ManualDocument12 pagesBPT Targha Instalation ManualFernando Manon100% (1)
- The Slow-Switching Slowdown Showdown: Pete MandikDocument21 pagesThe Slow-Switching Slowdown Showdown: Pete Mandikmandikp6033No ratings yet
- Governing System of 210mw KwuDocument21 pagesGoverning System of 210mw KwuNitesh Rasekar100% (5)
- III Eee I Sem Cs Lab Manual (Ee332) - 1Document51 pagesIII Eee I Sem Cs Lab Manual (Ee332) - 1Syed Salman AhmadNo ratings yet
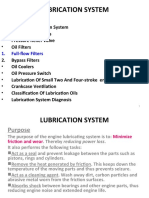
- Lubrication SystemDocument43 pagesLubrication Systemkebaman1986No ratings yet
- Industrial PaintingDocument312 pagesIndustrial Paintingyoners1691No ratings yet
- Ashghal - Silent Login: AcknowledgementsDocument4 pagesAshghal - Silent Login: AcknowledgementsSyed QasimNo ratings yet
- A8VO80Document27 pagesA8VO80Jose Salvador100% (1)
- Bajaj Electricals Limited: Head of R & D AB Square Navi Mumbai Executive DirectorDocument2 pagesBajaj Electricals Limited: Head of R & D AB Square Navi Mumbai Executive DirectorabhijitNo ratings yet
- Science 9 ReviewerDocument5 pagesScience 9 ReviewerJan Carlo Esmero100% (1)
- TECHNOLOGY1 Answer-1Document6 pagesTECHNOLOGY1 Answer-1JlkKumarNo ratings yet
- REC EQ ChartDocument2 pagesREC EQ ChartAntonio F.M. PalloneNo ratings yet
- 3A Demand EstimationlDocument109 pages3A Demand EstimationlAlok ShuklaNo ratings yet
- MIL-STD-1168B (Ammunition Lot Numbering and Amm. Data Card) PDFDocument50 pagesMIL-STD-1168B (Ammunition Lot Numbering and Amm. Data Card) PDFzorlon1No ratings yet
- QA SNT Amdt 1Document2 pagesQA SNT Amdt 1raj2404No ratings yet
- Motadata EMS DatasheetDocument11 pagesMotadata EMS DatasheetAnush BhardwajNo ratings yet
- Journal of Adhesion Science and TechnologyDocument20 pagesJournal of Adhesion Science and TechnologyfrvvNo ratings yet
- Part 4 Crop Protection Q ADocument54 pagesPart 4 Crop Protection Q AEleven HopperNo ratings yet
- Additional Charges of Daos in Agt 2019Document17 pagesAdditional Charges of Daos in Agt 2019heraldNo ratings yet
- 3D Geoscience Modeling, Computer Techniques For Geological Characterization (Simon W. Houlding, 1994) - (Geo Pedia) PDFDocument309 pages3D Geoscience Modeling, Computer Techniques For Geological Characterization (Simon W. Houlding, 1994) - (Geo Pedia) PDFbeku_ggs_beku100% (1)
- Palladio Door Collection Brochure Edition 4 Oct 2021Document68 pagesPalladio Door Collection Brochure Edition 4 Oct 2021Focus WindowsNo ratings yet
- 6003 Series 6403 and 6603 Tractors Mexico South Africa and Asian Edition Replacement Parts GuideDocument3 pages6003 Series 6403 and 6603 Tractors Mexico South Africa and Asian Edition Replacement Parts GuidePedro ValerioNo ratings yet
- 2 1 Fg8jglt Eep Final (PM)Document1 page2 1 Fg8jglt Eep Final (PM)hyde2520015754No ratings yet
- Advanced 250 V Three-Phase BLDC Controller With Embedded STM32 MCUDocument32 pagesAdvanced 250 V Three-Phase BLDC Controller With Embedded STM32 MCUOne SpringNo ratings yet
- Certified Energy Manager ® Training Program: Outline & Study Guide (SI Units)Document11 pagesCertified Energy Manager ® Training Program: Outline & Study Guide (SI Units)EngSafwanQadousNo ratings yet
- Polaris Ranger ManualDocument110 pagesPolaris Ranger ManualdarinNo ratings yet
- Symmetry: Multinode M2150 Intelligent ControllerDocument6 pagesSymmetry: Multinode M2150 Intelligent Controlleradela sampayoNo ratings yet



































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- Full Download Ebook Ebook PDF Microbiology With Diseases by Taxonomy 5th Edition PDFDocument40 pagesFull Download Ebook Ebook PDF Microbiology With Diseases by Taxonomy 5th Edition PDFmicheal.cooper97498% (42)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Service Manual: © MARCH 2016, Mercury Marine. All Rights Reserved. 90-8M0107213Document94 pagesService Manual: © MARCH 2016, Mercury Marine. All Rights Reserved. 90-8M0107213fabianoNo ratings yet
- Maptek I-Site Studio Geotechnical ModuleDocument4 pagesMaptek I-Site Studio Geotechnical ModulekennycasillaNo ratings yet
- BPT Targha Instalation ManualDocument12 pagesBPT Targha Instalation ManualFernando Manon100% (1)
- The Slow-Switching Slowdown Showdown: Pete MandikDocument21 pagesThe Slow-Switching Slowdown Showdown: Pete Mandikmandikp6033No ratings yet
- Governing System of 210mw KwuDocument21 pagesGoverning System of 210mw KwuNitesh Rasekar100% (5)
- III Eee I Sem Cs Lab Manual (Ee332) - 1Document51 pagesIII Eee I Sem Cs Lab Manual (Ee332) - 1Syed Salman AhmadNo ratings yet
- Lubrication SystemDocument43 pagesLubrication Systemkebaman1986No ratings yet
- Industrial PaintingDocument312 pagesIndustrial Paintingyoners1691No ratings yet
- Ashghal - Silent Login: AcknowledgementsDocument4 pagesAshghal - Silent Login: AcknowledgementsSyed QasimNo ratings yet
- A8VO80Document27 pagesA8VO80Jose Salvador100% (1)
- Bajaj Electricals Limited: Head of R & D AB Square Navi Mumbai Executive DirectorDocument2 pagesBajaj Electricals Limited: Head of R & D AB Square Navi Mumbai Executive DirectorabhijitNo ratings yet
- Science 9 ReviewerDocument5 pagesScience 9 ReviewerJan Carlo Esmero100% (1)
- TECHNOLOGY1 Answer-1Document6 pagesTECHNOLOGY1 Answer-1JlkKumarNo ratings yet
- REC EQ ChartDocument2 pagesREC EQ ChartAntonio F.M. PalloneNo ratings yet
- 3A Demand EstimationlDocument109 pages3A Demand EstimationlAlok ShuklaNo ratings yet
- MIL-STD-1168B (Ammunition Lot Numbering and Amm. Data Card) PDFDocument50 pagesMIL-STD-1168B (Ammunition Lot Numbering and Amm. Data Card) PDFzorlon1No ratings yet
- QA SNT Amdt 1Document2 pagesQA SNT Amdt 1raj2404No ratings yet
- Motadata EMS DatasheetDocument11 pagesMotadata EMS DatasheetAnush BhardwajNo ratings yet
- Journal of Adhesion Science and TechnologyDocument20 pagesJournal of Adhesion Science and TechnologyfrvvNo ratings yet
- Part 4 Crop Protection Q ADocument54 pagesPart 4 Crop Protection Q AEleven HopperNo ratings yet
- Additional Charges of Daos in Agt 2019Document17 pagesAdditional Charges of Daos in Agt 2019heraldNo ratings yet
- 3D Geoscience Modeling, Computer Techniques For Geological Characterization (Simon W. Houlding, 1994) - (Geo Pedia) PDFDocument309 pages3D Geoscience Modeling, Computer Techniques For Geological Characterization (Simon W. Houlding, 1994) - (Geo Pedia) PDFbeku_ggs_beku100% (1)
- Palladio Door Collection Brochure Edition 4 Oct 2021Document68 pagesPalladio Door Collection Brochure Edition 4 Oct 2021Focus WindowsNo ratings yet
- 6003 Series 6403 and 6603 Tractors Mexico South Africa and Asian Edition Replacement Parts GuideDocument3 pages6003 Series 6403 and 6603 Tractors Mexico South Africa and Asian Edition Replacement Parts GuidePedro ValerioNo ratings yet
- 2 1 Fg8jglt Eep Final (PM)Document1 page2 1 Fg8jglt Eep Final (PM)hyde2520015754No ratings yet
- Advanced 250 V Three-Phase BLDC Controller With Embedded STM32 MCUDocument32 pagesAdvanced 250 V Three-Phase BLDC Controller With Embedded STM32 MCUOne SpringNo ratings yet
- Certified Energy Manager ® Training Program: Outline & Study Guide (SI Units)Document11 pagesCertified Energy Manager ® Training Program: Outline & Study Guide (SI Units)EngSafwanQadousNo ratings yet
- Polaris Ranger ManualDocument110 pagesPolaris Ranger ManualdarinNo ratings yet
- Symmetry: Multinode M2150 Intelligent ControllerDocument6 pagesSymmetry: Multinode M2150 Intelligent Controlleradela sampayoNo ratings yet