Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- D 3029 - 94 Scan PDFDocument12 pagesD 3029 - 94 Scan PDFNabeel H. Al-SaighNo ratings yet
- By Dr. Gamal Helmy, PH.D., P.EDocument43 pagesBy Dr. Gamal Helmy, PH.D., P.EAhmed ArafaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Azimuth by ABCDocument38 pagesAzimuth by ABCNieL ReSpiCiONo ratings yet
- Basel Heave Goh2017Document5 pagesBasel Heave Goh2017Ahmed Arafa100% (1)
- Numerical Modeling of Single Pile in A Two-Layered Soil: Wattamwar Mayur Kishanrao, Arun PrasadDocument3 pagesNumerical Modeling of Single Pile in A Two-Layered Soil: Wattamwar Mayur Kishanrao, Arun PrasadAhmed ArafaNo ratings yet
- Case Studies in Geotechnical Engineering ConstructionsDocument29 pagesCase Studies in Geotechnical Engineering ConstructionsAhmed ArafaNo ratings yet
- 3-Sivalingam Koneshwaran ThesisDocument189 pages3-Sivalingam Koneshwaran ThesisAhmed ArafaNo ratings yet
- Computers and Geotechnics: Florian Tom Wörden, Martin AchmusDocument8 pagesComputers and Geotechnics: Florian Tom Wörden, Martin AchmusAhmed ArafaNo ratings yet
- Geotechnical ParametersDocument3 pagesGeotechnical ParametersAhmed ArafaNo ratings yet
- Bhat Okstate 0664M 10685 PDFDocument130 pagesBhat Okstate 0664M 10685 PDFAhmed ArafaNo ratings yet
- A Parametric Study of Wall Deflections in Deep Excavations With The Installation of Cross Walls PDFDocument11 pagesA Parametric Study of Wall Deflections in Deep Excavations With The Installation of Cross Walls PDFAhmed ArafaNo ratings yet
- Saturated Soil in ABAQUSDocument8 pagesSaturated Soil in ABAQUSAhmed ArafaNo ratings yet
- Diaphragm Wall Construction PDFDocument53 pagesDiaphragm Wall Construction PDFAhmed ArafaNo ratings yet
- Errata For: Revisions Are Shown in RedDocument3 pagesErrata For: Revisions Are Shown in RedAhmed ArafaNo ratings yet
- Loadcap enDocument35 pagesLoadcap enAhmed ArafaNo ratings yet
- Downdrag LectureDocument67 pagesDowndrag LectureAhmed ArafaNo ratings yet
- Centrifugal Fans With Backward-Curved and Forward-Curved BladesDocument8 pagesCentrifugal Fans With Backward-Curved and Forward-Curved BladesjcbobedaNo ratings yet
- Elemental Mind Map Project 6th GradeDocument2 pagesElemental Mind Map Project 6th GradeTalanNo ratings yet
- Experiment 7 Grade 11Document4 pagesExperiment 7 Grade 11Varnit MehraNo ratings yet
- CG8 Lesson 5 (Newtons 3rd Law) - MGStaAnaPNHSDocument20 pagesCG8 Lesson 5 (Newtons 3rd Law) - MGStaAnaPNHSGrace StaanaNo ratings yet
- Technical SubmittalDocument207 pagesTechnical SubmittalimranNo ratings yet
- Question Paper: Biology - 100 Chemistry - 50 Physics - 50Document24 pagesQuestion Paper: Biology - 100 Chemistry - 50 Physics - 50harita shindeNo ratings yet
- Piled Raft A New Foundation Design PhiloDocument10 pagesPiled Raft A New Foundation Design Philodhan singhNo ratings yet
- Roscoe 1953Document7 pagesRoscoe 1953Tiago SchuckNo ratings yet
- MK Series Geared Motor 20-8-2013Document104 pagesMK Series Geared Motor 20-8-2013Zahoor AhmedNo ratings yet
- Set 1 Marking Scheme Answer Key Math XI Term-2Document3 pagesSet 1 Marking Scheme Answer Key Math XI Term-2PRIYANSHU PRATIKNo ratings yet
- Footing Layout Plan LayoutDocument1 pageFooting Layout Plan LayoutCONFIANCE INFRATECH MANAGEMENT PVT LTDNo ratings yet
- TP-194 (Has-2) Mud ProgramDocument61 pagesTP-194 (Has-2) Mud ProgramhakoubNo ratings yet
- FOOTINGDocument12 pagesFOOTINGLorenz Carlo Robedillo GonzalesNo ratings yet
- Life in The Universe 3rd Edition Bennett Test BankDocument14 pagesLife in The Universe 3rd Edition Bennett Test Bankpaulnunezencsakobtq100% (11)
- KGRTC Course Schedule For 2019: (To Be Read in Conjunction With The KGRTC Course Handbook)Document1 pageKGRTC Course Schedule For 2019: (To Be Read in Conjunction With The KGRTC Course Handbook)R.SivachandranNo ratings yet
- Fanuc - Esp2003 NewDocument6 pagesFanuc - Esp2003 NewBiser TodorovNo ratings yet
- Thermal Engineering I Full Book FinalDocument175 pagesThermal Engineering I Full Book FinalKumar SubramanianNo ratings yet
- Ecw311 - Topic 4 InfiltrationDocument55 pagesEcw311 - Topic 4 InfiltrationBernardNo ratings yet
- Unit 3 Practice SheetDocument4 pagesUnit 3 Practice SheetAnamika GuptaNo ratings yet
- Bridge Column Design Based On AASHTO 17th & ACI 318-19: Input Data & Design SummaryDocument2 pagesBridge Column Design Based On AASHTO 17th & ACI 318-19: Input Data & Design SummaryMadhusudan ShewalkarNo ratings yet
- Defraction-Of-Light (1) - Investigatory ProjectDocument17 pagesDefraction-Of-Light (1) - Investigatory ProjectSankar AnanthyaNo ratings yet
- Work Power EnergyDocument72 pagesWork Power EnergyBuela, Lance GabrielNo ratings yet
- Summer Vacation Holiday Home Work 2024-25Document7 pagesSummer Vacation Holiday Home Work 2024-25syedsarowar4No ratings yet
- Previous Exams Questions Exercise-I: PhysicsDocument18 pagesPrevious Exams Questions Exercise-I: PhysicsSuryansh KhatiNo ratings yet
- Hydraulic Analysis Report of HVWS System.Document21 pagesHydraulic Analysis Report of HVWS System.SuhasNo ratings yet
- Analytical Study On Safety Level of Stay Cables of Cable Stayed BridgeDocument8 pagesAnalytical Study On Safety Level of Stay Cables of Cable Stayed Bridgesushil deshmukhNo ratings yet
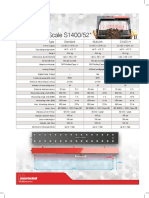
- Sensortechnik Optical Belt Scale Tech Sheet S1400 FinalDocument1 pageSensortechnik Optical Belt Scale Tech Sheet S1400 FinalyogaNo ratings yet
- Exploring The Limits of Buffering Process For Both Standard and Micro TubesDocument5 pagesExploring The Limits of Buffering Process For Both Standard and Micro TubesDenisTarasNo ratings yet