Download as pdf or txt
You might also like
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Irwin, Engineering Circuit Analysis, 11e ISV Chapter 12Document90 pagesIrwin, Engineering Circuit Analysis, 11e ISV Chapter 12이잉No ratings yet
- Industrial Communication: Chapter 2: Modbus SerialDocument34 pagesIndustrial Communication: Chapter 2: Modbus Serialdragon184100% (1)
- Sequential Circuits: March 28, 2006 1Document12 pagesSequential Circuits: March 28, 2006 1Lakshmikanth MeduriNo ratings yet
- LECTURE #16: Moore & Mealy Machines: EEL 3701: Digital Logic and Computer SystemsDocument8 pagesLECTURE #16: Moore & Mealy Machines: EEL 3701: Digital Logic and Computer SystemsNandlalYadavNo ratings yet
- Chapter 5 Synchronous Sequential CircuitDocument32 pagesChapter 5 Synchronous Sequential CircuitSenthur PriyaNo ratings yet
- Sequential CircuitDocument51 pagesSequential CircuitDamodar Telu100% (1)
- Digital Design ExamplesDocument29 pagesDigital Design ExampleshumnaharoonNo ratings yet
- Sequential Circuit Design Sequence RecognizerDocument4 pagesSequential Circuit Design Sequence RecognizerKhurram SamiNo ratings yet
- Esc201A: Introduction To Electronics: Sequential Circuit Design 2 Sequential Circuit Design - 2Document17 pagesEsc201A: Introduction To Electronics: Sequential Circuit Design 2 Sequential Circuit Design - 2Abhinay KumarNo ratings yet
- 6.1 Introduction of Sequential Logic CircuitsDocument71 pages6.1 Introduction of Sequential Logic CircuitsZhichaoWangNo ratings yet
- Notes 326 Set11Document16 pagesNotes 326 Set11Dhanu ChettyNo ratings yet
- Question Bank M Tech 2ND Sem Batch 2018Document31 pagesQuestion Bank M Tech 2ND Sem Batch 2018king khanNo ratings yet
- Sequential Circuit DesignDocument28 pagesSequential Circuit DesignNiranda PereraNo ratings yet
- FSM 1Document145 pagesFSM 1Sriharsha EnjapuriNo ratings yet
- EE 110 Practice Problems For Final Exam: SolutionsDocument7 pagesEE 110 Practice Problems For Final Exam: Solutionsmurthy237No ratings yet
- ITBP205 Digital Design and Computer OrganizationDocument21 pagesITBP205 Digital Design and Computer OrganizationReem Ashraf0% (1)
- Digsys Chapter 3Document53 pagesDigsys Chapter 3David OmaguNo ratings yet
- Ec 1201digital ElectronicsDocument17 pagesEc 1201digital ElectronicsSubathra Devi MourouganeNo ratings yet
- Chapter 3: Sequential Logic Some Definitions: Dr. Tim Mcguire Sam Houston State UniversityDocument6 pagesChapter 3: Sequential Logic Some Definitions: Dr. Tim Mcguire Sam Houston State Universitydemos2011No ratings yet
- Sequential CircuitsDocument11 pagesSequential CircuitsUday DesirajNo ratings yet
- Design of Sequential Circuits: Example 1.3Document3 pagesDesign of Sequential Circuits: Example 1.3Dhanwanth JPNo ratings yet
- Chapter #8: Finite State Machine DesignDocument57 pagesChapter #8: Finite State Machine DesignAli AhmadNo ratings yet
- Lecture7 Chapter5 - Design of Clocked Sequential CircuitsDocument26 pagesLecture7 Chapter5 - Design of Clocked Sequential CircuitsHamza RiazNo ratings yet
- ECE2030A Fall 2008 Introduction To Computer Engineering Exam #3Document8 pagesECE2030A Fall 2008 Introduction To Computer Engineering Exam #3salNo ratings yet
- Sequential Logic: (Chapter 3: Finite State Machine)Document26 pagesSequential Logic: (Chapter 3: Finite State Machine)Paul Christian M. CristobalNo ratings yet
- ECS 154A Midterm KeyDocument4 pagesECS 154A Midterm KeyTiffany LeeNo ratings yet
- Assignment6 Solution 3rd EditionDocument10 pagesAssignment6 Solution 3rd EditionRaffi SkNo ratings yet
- Chapter 6 - Introduction To Sequential DevicesDocument62 pagesChapter 6 - Introduction To Sequential DevicesSarath Chandra SNo ratings yet
- EE2001 Tutorial 5Document9 pagesEE2001 Tutorial 5RetheshNo ratings yet
- Switching Circuits & Logic Design: 14 Derivation of State Graphs and TablesDocument17 pagesSwitching Circuits & Logic Design: 14 Derivation of State Graphs and TablesAshish AgarwalNo ratings yet
- HW3 Fall2020Document6 pagesHW3 Fall2020ARSALANNo ratings yet
- Finite State Machines: Moore MachineDocument4 pagesFinite State Machines: Moore Machineborakas_borakasNo ratings yet
- Finite State Machines: Salvador Ruiz Correa Centro de Investigaciones en MatemáticasDocument25 pagesFinite State Machines: Salvador Ruiz Correa Centro de Investigaciones en MatemáticasHafeth DawbaaNo ratings yet
- Designing Synchronous Counters (9.5 FLOYD) ++: Warning!! Important TopicDocument31 pagesDesigning Synchronous Counters (9.5 FLOYD) ++: Warning!! Important TopicAbdul RafayNo ratings yet
- Design of Sequential Circuits - Example 1.3Document3 pagesDesign of Sequential Circuits - Example 1.3MD Saifuzzaman SohanNo ratings yet
- Digital Electonics DONEDocument19 pagesDigital Electonics DONEkassaroxzNo ratings yet
- Finite State MachineDocument57 pagesFinite State MachinedoomachaleyNo ratings yet
- Mitu SikaDocument11 pagesMitu SikaNishat FarjanaNo ratings yet
- 15 Hw03 DigitalSystems IDocument3 pages15 Hw03 DigitalSystems IWilliam ZhuangNo ratings yet
- ELE2120 Digital Circuits and Systems: Tutorial Note 9Document25 pagesELE2120 Digital Circuits and Systems: Tutorial Note 9Nelson Ubaldo Quispe MNo ratings yet
- Combinational Circuits: ALU: AND OR ADD SUB SLT Zero (A B)Document16 pagesCombinational Circuits: ALU: AND OR ADD SUB SLT Zero (A B)anbaneNo ratings yet
- Sequential LogicDocument139 pagesSequential Logicmdhuq1100% (1)
- CH 5 DigitalDocument59 pagesCH 5 DigitalSenay MehariNo ratings yet
- VGGVDocument32 pagesVGGVpoiuret isthisgoodNo ratings yet
- Designing A Data Synchronizer Logic CircuitDocument6 pagesDesigning A Data Synchronizer Logic CircuitbabahussainNo ratings yet
- Digital 16 Marks.Document4 pagesDigital 16 Marks.Saranya PrabhuNo ratings yet
- Sequential Circuit Analysis Review: Flip-Flop VariationsDocument5 pagesSequential Circuit Analysis Review: Flip-Flop VariationsAlfi Muhammad Akbar BariaNo ratings yet
- Serial AdderDocument38 pagesSerial AdderSirr TywinNo ratings yet
- 99 BCD Up - Down CounterDocument25 pages99 BCD Up - Down CounterArjun Pratap Singh33% (3)
- You Yoga........Document29 pagesYou Yoga........Aswand BaskarNo ratings yet
- Lec Nnaik Sequential CircuitsDocument27 pagesLec Nnaik Sequential Circuits11kumarvishal4No ratings yet
- HW 06Document4 pagesHW 06Kevin KarthikNo ratings yet
- FPGA Based System Design: Engr. Rashid Farid Chishti Lecturer, Dee, Fet, Iiui Chishti@Iiu - Edu.Pk Week 8Document6 pagesFPGA Based System Design: Engr. Rashid Farid Chishti Lecturer, Dee, Fet, Iiui Chishti@Iiu - Edu.Pk Week 8Sohail AfridiNo ratings yet
- Sequential Circuits: March 28, 2006 1Document12 pagesSequential Circuits: March 28, 2006 1Sunil Kumar DasariNo ratings yet
- F9: Asynchronous State Machines (Asms)Document16 pagesF9: Asynchronous State Machines (Asms)Cenation MwlNo ratings yet
- D Flip-Flop JK Flip-Flop SR-latch T Flip-Flop D Q J K Q S R Q T Q 0 0 0 0 0 0 1 0 1 0 1 1 1 0 1 0 1 1 1 1Document4 pagesD Flip-Flop JK Flip-Flop SR-latch T Flip-Flop D Q J K Q S R Q T Q 0 0 0 0 0 0 1 0 1 0 1 1 1 0 1 0 1 1 1 1Mộc SầuNo ratings yet
- GATE+ISRO DIGITAL LOGIC AND COMPUTER ORGANIZATION 2015 - Sequential CircuitsDocument35 pagesGATE+ISRO DIGITAL LOGIC AND COMPUTER ORGANIZATION 2015 - Sequential CircuitsRejinRajanNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- BRKOPT-2204 - Building Carrier Ethernet Services Using Cisco Ethernet Virtual Circuit (EVC) FrameworkDocument109 pagesBRKOPT-2204 - Building Carrier Ethernet Services Using Cisco Ethernet Virtual Circuit (EVC) FrameworkQuoc Khanh PhamNo ratings yet
- EvcDocument44 pagesEvcGiang NguyenNo ratings yet
- The Jfet: Device EquationsDocument9 pagesThe Jfet: Device EquationsQuoc Khanh PhamNo ratings yet
- RF Electronic Circuits For The Hobbyist - CompleteDocument8 pagesRF Electronic Circuits For The Hobbyist - CompleteQuoc Khanh PhamNo ratings yet
- Cover Sheet, FETS & FET Circuits: Topology: General PurposeDocument1 pageCover Sheet, FETS & FET Circuits: Topology: General PurposeQuoc Khanh PhamNo ratings yet
- Industrial Communication: Chapter 4: Ethernet Modbus TCP/IPDocument66 pagesIndustrial Communication: Chapter 4: Ethernet Modbus TCP/IPdragon18467% (3)
- BJTcoverDocument1 pageBJTcoverQuoc Khanh PhamNo ratings yet
- Verilog HDL SyllabusDocument2 pagesVerilog HDL Syllabussuhas RNo ratings yet
- Assignment 2Document10 pagesAssignment 2Vishakh BharadwajNo ratings yet
- MramDocument15 pagesMramVeerendra VermaNo ratings yet
- Samatha.S: Design Engineer Volvo Kynasys Technologies Mobile: +91-8074043442Document4 pagesSamatha.S: Design Engineer Volvo Kynasys Technologies Mobile: +91-8074043442aravi173No ratings yet
- What Is Integrated Circuit (IC)Document19 pagesWhat Is Integrated Circuit (IC)jackNo ratings yet
- Experiment 1Document8 pagesExperiment 1Himanshu GuptaNo ratings yet
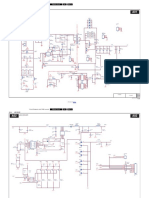
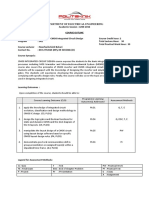
- Fuentes Phillisp Rca 715G6297Document4 pagesFuentes Phillisp Rca 715G6297Amin SantanaNo ratings yet
- Flynn ClassificationDocument4 pagesFlynn ClassificationMukesh KumarNo ratings yet
- Breadboard Regulated Power Suplly 5v-3.3vDocument10 pagesBreadboard Regulated Power Suplly 5v-3.3vStevanus ColonneNo ratings yet
- (WWW - Entrance-Exam - Net) - PTU MCA 3rd Semester Sample Paper 4Document2 pages(WWW - Entrance-Exam - Net) - PTU MCA 3rd Semester Sample Paper 4Mangesh MalvankarNo ratings yet
- Topic 2 - Subtopic 2.2Document49 pagesTopic 2 - Subtopic 2.2Navinaash Chanthra SegaranNo ratings yet
- 8051 PPTDocument51 pages8051 PPTKudumu Vara PrasadNo ratings yet
- FSM ASM DiagramasDocument56 pagesFSM ASM Diagramasvaz5z100% (1)
- JTAG TutorialDocument8 pagesJTAG TutorialVinay KrNo ratings yet
- STLD Lesson PlanDocument43 pagesSTLD Lesson PlanSony RamaNo ratings yet
- Hspice TutorialDocument134 pagesHspice Tutorialxx kkNo ratings yet
- Design Issues: SMT and CMP ArchitecturesDocument9 pagesDesign Issues: SMT and CMP ArchitecturesSenthil KumarNo ratings yet
- Timer and CounterDocument30 pagesTimer and Countercleopatra2121No ratings yet
- FPGA Interview QuestionsDocument12 pagesFPGA Interview QuestionsVirbhadra RathodNo ratings yet
- VLSI Design AssignmentDocument3 pagesVLSI Design Assignmentabhijit_jamdadeNo ratings yet
- Toshiba 32av700e LCD TV SCHDocument44 pagesToshiba 32av700e LCD TV SCHMuhammad Ihsan100% (1)
- 4017 Decade CounterDocument8 pages4017 Decade CounterSarah Q N HidayatNo ratings yet
- RC Optimization Best PracticesDocument12 pagesRC Optimization Best PracticespradeepmanthaniNo ratings yet
- (PDF) Project Report On IC 555 Timer CircuitDocument10 pages(PDF) Project Report On IC 555 Timer CircuitViren RajputNo ratings yet
- Computer Architecture Assignment 1Document4 pagesComputer Architecture Assignment 1Emilia KullutweNo ratings yet
- DEE6113 Course Outline Jun2016Document4 pagesDEE6113 Course Outline Jun2016FonzBahariNo ratings yet
- Computer Beep Codes PowerpointDocument13 pagesComputer Beep Codes PowerpointIcRaZy MiXNo ratings yet
- Counters and TimersDocument45 pagesCounters and TimersMtoi TvNo ratings yet
- Es19btech11024 HW1Document3 pagesEs19btech11024 HW1Salam RockybhaiNo ratings yet