
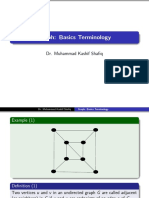
Chapter 05
Chapter 05
You might also like
- Minimal Harary Index of Unicyclic Graphs With Diameter at Most 4Document11 pagesMinimal Harary Index of Unicyclic Graphs With Diameter at Most 4dragance107No ratings yet
- The Distance Spectrum of Corona and Cluster of Two GraphsDocument7 pagesThe Distance Spectrum of Corona and Cluster of Two Graphsdragance107No ratings yet
- Exercise No. 12: DFS, BFS, Topological-SortDocument6 pagesExercise No. 12: DFS, BFS, Topological-SortMarcoNo ratings yet
- Graph Theory NotesDocument49 pagesGraph Theory NotesShyupomen UzNo ratings yet
- Lecture 3Document10 pagesLecture 3saleem9242ssNo ratings yet
- 1.1 Graph TheoryDocument8 pages1.1 Graph TheorySamah Sam BouimaNo ratings yet
- Graph Theory: Introduction. Distance in Graphs. TreesDocument40 pagesGraph Theory: Introduction. Distance in Graphs. TreesRaluca RomanovNo ratings yet
- Graph 1Document5 pagesGraph 1zainsaeed4871No ratings yet
- T-79 4202 Solutions 4Document4 pagesT-79 4202 Solutions 4bobopowerNo ratings yet
- The K-Distance Degree Index of Corona, Neighborhood Corona Products and Join of GraphsDocument12 pagesThe K-Distance Degree Index of Corona, Neighborhood Corona Products and Join of GraphsIoan DegauNo ratings yet
- Literatue ReviewDocument13 pagesLiteratue Reviewadnan mehmoodNo ratings yet
- Basic Graph Theory Definitions and NotationDocument2 pagesBasic Graph Theory Definitions and Notationvk100No ratings yet
- Graph Theory PDFDocument213 pagesGraph Theory PDFDaniel Lee Eisenberg JacobsNo ratings yet
- Graphs: Dr. Sun Pak KiuDocument52 pagesGraphs: Dr. Sun Pak KiujackaccyouNo ratings yet
- Stanford Graph Problems 1Document1 pageStanford Graph Problems 1A.ShahNo ratings yet
- Graph TheoryDocument460 pagesGraph TheoryShadowed100% (1)
- Journal of Computational and Applied Mathematics: H. Yousefi-Azari, M.H. Khalifeh, A.R. AshrafiDocument5 pagesJournal of Computational and Applied Mathematics: H. Yousefi-Azari, M.H. Khalifeh, A.R. AshrafiAmmarArshadNo ratings yet
- Notes GraphDocument9 pagesNotes GraphFurkan memonNo ratings yet
- Solved Question Paper Questions Graph Theory1Document67 pagesSolved Question Paper Questions Graph Theory1Jason AppahNo ratings yet
- GT 1 IntroductionDocument4 pagesGT 1 Introductionelgie liwagonNo ratings yet
- Math 7400 Graph Theory: Bogdan OporowskiDocument213 pagesMath 7400 Graph Theory: Bogdan OporowskiHalex CastroNo ratings yet
- Week 1-2: Graphs and SubgraphsDocument13 pagesWeek 1-2: Graphs and SubgraphsJohn ChanNo ratings yet
- Lecture 9: Breadth-First Search: New Unit: Graphs!Document5 pagesLecture 9: Breadth-First Search: New Unit: Graphs!Van Vy HongNo ratings yet
- Edge Hop Domination in GraphsDocument13 pagesEdge Hop Domination in Graphssalahaljbli1234No ratings yet
- Graph TheoryDocument302 pagesGraph TheorysanthoshNo ratings yet
- Graph TheoryDocument28 pagesGraph TheorygbikornoNo ratings yet
- Advanced Data Structures Lecture 2Document69 pagesAdvanced Data Structures Lecture 2Dan HeisenbergNo ratings yet
- An Introduction To Graph TheoryDocument32 pagesAn Introduction To Graph TheoryTitei PaulNo ratings yet
- Discrete Applied Mathematics: Delia Garijo, Antonio González, Alberto MárquezDocument8 pagesDiscrete Applied Mathematics: Delia Garijo, Antonio González, Alberto MárquezBeatriceNo ratings yet
- An All-Pairs Shortest Path Algorithm For Bipartite Graphs: Central European Journal of Computer ScienceDocument9 pagesAn All-Pairs Shortest Path Algorithm For Bipartite Graphs: Central European Journal of Computer ScienceAhad Bin Islam ShoebNo ratings yet
- Theorems On List-Coloring: Dharmaiah Gurram, N.VedavathiDocument5 pagesTheorems On List-Coloring: Dharmaiah Gurram, N.VedavathiIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- On The Additively Weighted Harary Index of Some Composite GraphsDocument13 pagesOn The Additively Weighted Harary Index of Some Composite GraphsBalachandranNo ratings yet
- 1.1 Graphs and Digraphs 1.2 Common Families of Graphs 1.4 Walks and Distance 1.5 Paths, Cycles, and TreesDocument25 pages1.1 Graphs and Digraphs 1.2 Common Families of Graphs 1.4 Walks and Distance 1.5 Paths, Cycles, and TreesTushar GuptaNo ratings yet
- Monophonic Eccentric Domination Numbers of Graphs: Sergio R. Canoy, JR., Anabel E. GamorezDocument11 pagesMonophonic Eccentric Domination Numbers of Graphs: Sergio R. Canoy, JR., Anabel E. Gamorezecastillano12No ratings yet
- Certified Hop Independence: Properties and Connections With Other Variants of IndependenceDocument10 pagesCertified Hop Independence: Properties and Connections With Other Variants of IndependenceAngelo OliveiraNo ratings yet
- Notes Graph Theory 050319Document74 pagesNotes Graph Theory 050319NurFatihah Nadirah Noor AzlanNo ratings yet
- GraphsDocument25 pagesGraphsMR.M.MURALI KRISHNANNo ratings yet
- 2 Fundamentals: Ulrik Brandes and Thomas ErlebachDocument9 pages2 Fundamentals: Ulrik Brandes and Thomas Erlebachmorgoth12No ratings yet
- The Partition Dimension of Strong Product Graphs and Cartesian Product GraphsDocument16 pagesThe Partition Dimension of Strong Product Graphs and Cartesian Product Graphsvanaj123No ratings yet
- Graph Algorithms: CSE5311 - Lectures by Prof. Chris DingDocument12 pagesGraph Algorithms: CSE5311 - Lectures by Prof. Chris DingjawafuhajNo ratings yet
- AST20105 Data Structure and Algorithms: Chapter 8 - GraphDocument42 pagesAST20105 Data Structure and Algorithms: Chapter 8 - GraphHANG XUNo ratings yet
- Graph-Theory PDF EbookDocument7 pagesGraph-Theory PDF EbookSudipto RoyNo ratings yet
- Basics of Graph TheoryDocument31 pagesBasics of Graph Theorypurijatin100% (3)
- (Graph Theory) : Discrete Structure Tribhuvan University Kathmandu, NepalDocument44 pages(Graph Theory) : Discrete Structure Tribhuvan University Kathmandu, NepalSuman Thapa MagarNo ratings yet
- Unit - VDocument12 pagesUnit - VJasmine MaryNo ratings yet
- Edited MfcsDocument20 pagesEdited MfcsAnil KumarNo ratings yet
- Graph 2Document12 pagesGraph 2ZCS SPORTSNo ratings yet
- Graph AlgorithmsDocument20 pagesGraph Algorithmsapi-3844034100% (3)
- Journal of Combinatorial Theory, Series A: Article InfoDocument10 pagesJournal of Combinatorial Theory, Series A: Article InfoLyrad MagpantayNo ratings yet
- Topology Control in Wireless Ad Hoc and Sensor Networks - 2005 - SantiDocument8 pagesTopology Control in Wireless Ad Hoc and Sensor Networks - 2005 - Santinehalghewade27No ratings yet
- Total Dominating Color Transversal Number of Graphs and Graph OperationsDocument4 pagesTotal Dominating Color Transversal Number of Graphs and Graph OperationsinventionjournalsNo ratings yet
- CPE133-Lecture Notes - L7-451-Graphs and SearchDocument36 pagesCPE133-Lecture Notes - L7-451-Graphs and SearchAhmed SaidNo ratings yet
- Introduction To Graphs: Multigraph, Other Just Call A GraphDocument17 pagesIntroduction To Graphs: Multigraph, Other Just Call A GraphMaitreyee Abhisek SaikiaNo ratings yet
- The Multiset Dimension of Graphs: Keywords: Metric Dimension, Multiset Dimension, Distance. 2000 MSC: 05C35, 05C12Document9 pagesThe Multiset Dimension of Graphs: Keywords: Metric Dimension, Multiset Dimension, Distance. 2000 MSC: 05C35, 05C12Enzha Conrad Der'panserNo ratings yet
- Introduction To Graph TheoryDocument51 pagesIntroduction To Graph TheoryDwi MaryonoNo ratings yet
- 1 s2.0 S0012365X99003817 MainDocument38 pages1 s2.0 S0012365X99003817 MainMano SalmanNo ratings yet
- Seminar ReportDocument5 pagesSeminar Reportnaru.mathNo ratings yet
- Fundamental Concepts and Basic Results: Theorem 1.1Document28 pagesFundamental Concepts and Basic Results: Theorem 1.1Chris HandalNo ratings yet
- Geometry and Locus (Geometry) Mathematics Question BankFrom EverandGeometry and Locus (Geometry) Mathematics Question BankNo ratings yet
- Travelling Salesman ProblemDocument2 pagesTravelling Salesman ProblemkashiqirphanNo ratings yet
- Chapter 7 Clustering OriginalDocument26 pagesChapter 7 Clustering OriginalNilesh ChandraNo ratings yet
- KD Kakuro 5x5 v4 s2 b097Document3 pagesKD Kakuro 5x5 v4 s2 b097RADU GABINo ratings yet
- Exercices - Chapter6Document3 pagesExercices - Chapter6Myummie eNo ratings yet
- Kaust Cs204 Fall2022 Lecture10 BfsanddfsDocument35 pagesKaust Cs204 Fall2022 Lecture10 Bfsanddfsreema alnafisiNo ratings yet
- Aoa LabDocument7 pagesAoa LabAmanNo ratings yet
- Depth-First Search: Lecture OverviewDocument6 pagesDepth-First Search: Lecture OverviewAditya SanjayBoobNo ratings yet
- 8x8 02Document2 pages8x8 02api-3843571No ratings yet
- Data Structures and AlgorithmsDocument14 pagesData Structures and AlgorithmsQais KhanNo ratings yet
- Traveling Salesman ProblemDocument24 pagesTraveling Salesman ProblemK.R.Raguram0% (1)
- KD Sudoku EZ 8 v77 PDFDocument10 pagesKD Sudoku EZ 8 v77 PDFCristina PacNo ratings yet
- hw4 1-SolutionsDocument1 pagehw4 1-SolutionspooNo ratings yet
- Graph-2 DfsDocument56 pagesGraph-2 DfsNuzhat AfrinNo ratings yet
- Introduction To Graph Coloring - GeeksforGeeksDocument6 pagesIntroduction To Graph Coloring - GeeksforGeeksmaniking9346No ratings yet
- Artificial Intelligence Project PresentationDocument34 pagesArtificial Intelligence Project Presentationilias ahmedNo ratings yet
- Champion Sudoku: Week 23.: Sumet Juariyamark (THA) - Prasanna Seshadri (IND)Document2 pagesChampion Sudoku: Week 23.: Sumet Juariyamark (THA) - Prasanna Seshadri (IND)Gafencu RubenNo ratings yet
- Difference Between BFS and DFSDocument3 pagesDifference Between BFS and DFSMuzamil YousafNo ratings yet
- CS70 Midterm Exam 1 Fall 2014 PDFDocument8 pagesCS70 Midterm Exam 1 Fall 2014 PDFfaraNo ratings yet
- DFS and BFS AlgorithmDocument11 pagesDFS and BFS AlgorithmRohan Chavan100% (1)
- Kakuro #1: 10X10 Kakuro Puzzles by Krazydad, Book 1Document9 pagesKakuro #1: 10X10 Kakuro Puzzles by Krazydad, Book 1Hye Min SeoNo ratings yet
- CS3401 ALG UNIT 2 NOTES EduEnggDocument25 pagesCS3401 ALG UNIT 2 NOTES EduEnggSabeshNo ratings yet
- Implementation of BFS and DFS in Python Without Using Any Library FunctionDocument4 pagesImplementation of BFS and DFS in Python Without Using Any Library FunctionMaisha MashiataNo ratings yet
- 4x4 Sudoku Puzzle by Printablecreative 2Document5 pages4x4 Sudoku Puzzle by Printablecreative 2Mara DindealNo ratings yet
- Solutions ClrsDocument2 pagesSolutions ClrsDrAmit Kumar ChandananNo ratings yet
- Sudoku Challenge: NameDocument10 pagesSudoku Challenge: NameJack MassalskiNo ratings yet
- DAA Question BankDocument9 pagesDAA Question BankTejasvi QueenyNo ratings yet
- CATBox Sample MaxFlowsDocument25 pagesCATBox Sample MaxFlowsMike MüllerNo ratings yet
- Travelling Salesman Problem (Greedy Approach)Document7 pagesTravelling Salesman Problem (Greedy Approach)Elangovan MNo ratings yet
- Chapter 3 Searching and PlanningDocument104 pagesChapter 3 Searching and PlanningTemesgenNo ratings yet
- DAA PPT - Unit - IVDocument9 pagesDAA PPT - Unit - IVAbhinavKundraNo ratings yet























































































Download as pdf or txt
You might also like
- Minimal Harary Index of Unicyclic Graphs With Diameter at Most 4Document11 pagesMinimal Harary Index of Unicyclic Graphs With Diameter at Most 4dragance107No ratings yet
- The Distance Spectrum of Corona and Cluster of Two GraphsDocument7 pagesThe Distance Spectrum of Corona and Cluster of Two Graphsdragance107No ratings yet
- Exercise No. 12: DFS, BFS, Topological-SortDocument6 pagesExercise No. 12: DFS, BFS, Topological-SortMarcoNo ratings yet
- Graph Theory NotesDocument49 pagesGraph Theory NotesShyupomen UzNo ratings yet
- Lecture 3Document10 pagesLecture 3saleem9242ssNo ratings yet
- 1.1 Graph TheoryDocument8 pages1.1 Graph TheorySamah Sam BouimaNo ratings yet
- Graph Theory: Introduction. Distance in Graphs. TreesDocument40 pagesGraph Theory: Introduction. Distance in Graphs. TreesRaluca RomanovNo ratings yet
- Graph 1Document5 pagesGraph 1zainsaeed4871No ratings yet
- T-79 4202 Solutions 4Document4 pagesT-79 4202 Solutions 4bobopowerNo ratings yet
- The K-Distance Degree Index of Corona, Neighborhood Corona Products and Join of GraphsDocument12 pagesThe K-Distance Degree Index of Corona, Neighborhood Corona Products and Join of GraphsIoan DegauNo ratings yet
- Literatue ReviewDocument13 pagesLiteratue Reviewadnan mehmoodNo ratings yet
- Basic Graph Theory Definitions and NotationDocument2 pagesBasic Graph Theory Definitions and Notationvk100No ratings yet
- Graph Theory PDFDocument213 pagesGraph Theory PDFDaniel Lee Eisenberg JacobsNo ratings yet
- Graphs: Dr. Sun Pak KiuDocument52 pagesGraphs: Dr. Sun Pak KiujackaccyouNo ratings yet
- Stanford Graph Problems 1Document1 pageStanford Graph Problems 1A.ShahNo ratings yet
- Graph TheoryDocument460 pagesGraph TheoryShadowed100% (1)
- Journal of Computational and Applied Mathematics: H. Yousefi-Azari, M.H. Khalifeh, A.R. AshrafiDocument5 pagesJournal of Computational and Applied Mathematics: H. Yousefi-Azari, M.H. Khalifeh, A.R. AshrafiAmmarArshadNo ratings yet
- Notes GraphDocument9 pagesNotes GraphFurkan memonNo ratings yet
- Solved Question Paper Questions Graph Theory1Document67 pagesSolved Question Paper Questions Graph Theory1Jason AppahNo ratings yet
- GT 1 IntroductionDocument4 pagesGT 1 Introductionelgie liwagonNo ratings yet
- Math 7400 Graph Theory: Bogdan OporowskiDocument213 pagesMath 7400 Graph Theory: Bogdan OporowskiHalex CastroNo ratings yet
- Week 1-2: Graphs and SubgraphsDocument13 pagesWeek 1-2: Graphs and SubgraphsJohn ChanNo ratings yet
- Lecture 9: Breadth-First Search: New Unit: Graphs!Document5 pagesLecture 9: Breadth-First Search: New Unit: Graphs!Van Vy HongNo ratings yet
- Edge Hop Domination in GraphsDocument13 pagesEdge Hop Domination in Graphssalahaljbli1234No ratings yet
- Graph TheoryDocument302 pagesGraph TheorysanthoshNo ratings yet
- Graph TheoryDocument28 pagesGraph TheorygbikornoNo ratings yet
- Advanced Data Structures Lecture 2Document69 pagesAdvanced Data Structures Lecture 2Dan HeisenbergNo ratings yet
- An Introduction To Graph TheoryDocument32 pagesAn Introduction To Graph TheoryTitei PaulNo ratings yet
- Discrete Applied Mathematics: Delia Garijo, Antonio González, Alberto MárquezDocument8 pagesDiscrete Applied Mathematics: Delia Garijo, Antonio González, Alberto MárquezBeatriceNo ratings yet
- An All-Pairs Shortest Path Algorithm For Bipartite Graphs: Central European Journal of Computer ScienceDocument9 pagesAn All-Pairs Shortest Path Algorithm For Bipartite Graphs: Central European Journal of Computer ScienceAhad Bin Islam ShoebNo ratings yet
- Theorems On List-Coloring: Dharmaiah Gurram, N.VedavathiDocument5 pagesTheorems On List-Coloring: Dharmaiah Gurram, N.VedavathiIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- On The Additively Weighted Harary Index of Some Composite GraphsDocument13 pagesOn The Additively Weighted Harary Index of Some Composite GraphsBalachandranNo ratings yet
- 1.1 Graphs and Digraphs 1.2 Common Families of Graphs 1.4 Walks and Distance 1.5 Paths, Cycles, and TreesDocument25 pages1.1 Graphs and Digraphs 1.2 Common Families of Graphs 1.4 Walks and Distance 1.5 Paths, Cycles, and TreesTushar GuptaNo ratings yet
- Monophonic Eccentric Domination Numbers of Graphs: Sergio R. Canoy, JR., Anabel E. GamorezDocument11 pagesMonophonic Eccentric Domination Numbers of Graphs: Sergio R. Canoy, JR., Anabel E. Gamorezecastillano12No ratings yet
- Certified Hop Independence: Properties and Connections With Other Variants of IndependenceDocument10 pagesCertified Hop Independence: Properties and Connections With Other Variants of IndependenceAngelo OliveiraNo ratings yet
- Notes Graph Theory 050319Document74 pagesNotes Graph Theory 050319NurFatihah Nadirah Noor AzlanNo ratings yet
- GraphsDocument25 pagesGraphsMR.M.MURALI KRISHNANNo ratings yet
- 2 Fundamentals: Ulrik Brandes and Thomas ErlebachDocument9 pages2 Fundamentals: Ulrik Brandes and Thomas Erlebachmorgoth12No ratings yet
- The Partition Dimension of Strong Product Graphs and Cartesian Product GraphsDocument16 pagesThe Partition Dimension of Strong Product Graphs and Cartesian Product Graphsvanaj123No ratings yet
- Graph Algorithms: CSE5311 - Lectures by Prof. Chris DingDocument12 pagesGraph Algorithms: CSE5311 - Lectures by Prof. Chris DingjawafuhajNo ratings yet
- AST20105 Data Structure and Algorithms: Chapter 8 - GraphDocument42 pagesAST20105 Data Structure and Algorithms: Chapter 8 - GraphHANG XUNo ratings yet
- Graph-Theory PDF EbookDocument7 pagesGraph-Theory PDF EbookSudipto RoyNo ratings yet
- Basics of Graph TheoryDocument31 pagesBasics of Graph Theorypurijatin100% (3)
- (Graph Theory) : Discrete Structure Tribhuvan University Kathmandu, NepalDocument44 pages(Graph Theory) : Discrete Structure Tribhuvan University Kathmandu, NepalSuman Thapa MagarNo ratings yet
- Unit - VDocument12 pagesUnit - VJasmine MaryNo ratings yet
- Edited MfcsDocument20 pagesEdited MfcsAnil KumarNo ratings yet
- Graph 2Document12 pagesGraph 2ZCS SPORTSNo ratings yet
- Graph AlgorithmsDocument20 pagesGraph Algorithmsapi-3844034100% (3)
- Journal of Combinatorial Theory, Series A: Article InfoDocument10 pagesJournal of Combinatorial Theory, Series A: Article InfoLyrad MagpantayNo ratings yet
- Topology Control in Wireless Ad Hoc and Sensor Networks - 2005 - SantiDocument8 pagesTopology Control in Wireless Ad Hoc and Sensor Networks - 2005 - Santinehalghewade27No ratings yet
- Total Dominating Color Transversal Number of Graphs and Graph OperationsDocument4 pagesTotal Dominating Color Transversal Number of Graphs and Graph OperationsinventionjournalsNo ratings yet
- CPE133-Lecture Notes - L7-451-Graphs and SearchDocument36 pagesCPE133-Lecture Notes - L7-451-Graphs and SearchAhmed SaidNo ratings yet
- Introduction To Graphs: Multigraph, Other Just Call A GraphDocument17 pagesIntroduction To Graphs: Multigraph, Other Just Call A GraphMaitreyee Abhisek SaikiaNo ratings yet
- The Multiset Dimension of Graphs: Keywords: Metric Dimension, Multiset Dimension, Distance. 2000 MSC: 05C35, 05C12Document9 pagesThe Multiset Dimension of Graphs: Keywords: Metric Dimension, Multiset Dimension, Distance. 2000 MSC: 05C35, 05C12Enzha Conrad Der'panserNo ratings yet
- Introduction To Graph TheoryDocument51 pagesIntroduction To Graph TheoryDwi MaryonoNo ratings yet
- 1 s2.0 S0012365X99003817 MainDocument38 pages1 s2.0 S0012365X99003817 MainMano SalmanNo ratings yet
- Seminar ReportDocument5 pagesSeminar Reportnaru.mathNo ratings yet
- Fundamental Concepts and Basic Results: Theorem 1.1Document28 pagesFundamental Concepts and Basic Results: Theorem 1.1Chris HandalNo ratings yet
- Geometry and Locus (Geometry) Mathematics Question BankFrom EverandGeometry and Locus (Geometry) Mathematics Question BankNo ratings yet
- Travelling Salesman ProblemDocument2 pagesTravelling Salesman ProblemkashiqirphanNo ratings yet
- Chapter 7 Clustering OriginalDocument26 pagesChapter 7 Clustering OriginalNilesh ChandraNo ratings yet
- KD Kakuro 5x5 v4 s2 b097Document3 pagesKD Kakuro 5x5 v4 s2 b097RADU GABINo ratings yet
- Exercices - Chapter6Document3 pagesExercices - Chapter6Myummie eNo ratings yet
- Kaust Cs204 Fall2022 Lecture10 BfsanddfsDocument35 pagesKaust Cs204 Fall2022 Lecture10 Bfsanddfsreema alnafisiNo ratings yet
- Aoa LabDocument7 pagesAoa LabAmanNo ratings yet
- Depth-First Search: Lecture OverviewDocument6 pagesDepth-First Search: Lecture OverviewAditya SanjayBoobNo ratings yet
- 8x8 02Document2 pages8x8 02api-3843571No ratings yet
- Data Structures and AlgorithmsDocument14 pagesData Structures and AlgorithmsQais KhanNo ratings yet
- Traveling Salesman ProblemDocument24 pagesTraveling Salesman ProblemK.R.Raguram0% (1)
- KD Sudoku EZ 8 v77 PDFDocument10 pagesKD Sudoku EZ 8 v77 PDFCristina PacNo ratings yet
- hw4 1-SolutionsDocument1 pagehw4 1-SolutionspooNo ratings yet
- Graph-2 DfsDocument56 pagesGraph-2 DfsNuzhat AfrinNo ratings yet
- Introduction To Graph Coloring - GeeksforGeeksDocument6 pagesIntroduction To Graph Coloring - GeeksforGeeksmaniking9346No ratings yet
- Artificial Intelligence Project PresentationDocument34 pagesArtificial Intelligence Project Presentationilias ahmedNo ratings yet
- Champion Sudoku: Week 23.: Sumet Juariyamark (THA) - Prasanna Seshadri (IND)Document2 pagesChampion Sudoku: Week 23.: Sumet Juariyamark (THA) - Prasanna Seshadri (IND)Gafencu RubenNo ratings yet
- Difference Between BFS and DFSDocument3 pagesDifference Between BFS and DFSMuzamil YousafNo ratings yet
- CS70 Midterm Exam 1 Fall 2014 PDFDocument8 pagesCS70 Midterm Exam 1 Fall 2014 PDFfaraNo ratings yet
- DFS and BFS AlgorithmDocument11 pagesDFS and BFS AlgorithmRohan Chavan100% (1)
- Kakuro #1: 10X10 Kakuro Puzzles by Krazydad, Book 1Document9 pagesKakuro #1: 10X10 Kakuro Puzzles by Krazydad, Book 1Hye Min SeoNo ratings yet
- CS3401 ALG UNIT 2 NOTES EduEnggDocument25 pagesCS3401 ALG UNIT 2 NOTES EduEnggSabeshNo ratings yet
- Implementation of BFS and DFS in Python Without Using Any Library FunctionDocument4 pagesImplementation of BFS and DFS in Python Without Using Any Library FunctionMaisha MashiataNo ratings yet
- 4x4 Sudoku Puzzle by Printablecreative 2Document5 pages4x4 Sudoku Puzzle by Printablecreative 2Mara DindealNo ratings yet
- Solutions ClrsDocument2 pagesSolutions ClrsDrAmit Kumar ChandananNo ratings yet
- Sudoku Challenge: NameDocument10 pagesSudoku Challenge: NameJack MassalskiNo ratings yet
- DAA Question BankDocument9 pagesDAA Question BankTejasvi QueenyNo ratings yet
- CATBox Sample MaxFlowsDocument25 pagesCATBox Sample MaxFlowsMike MüllerNo ratings yet
- Travelling Salesman Problem (Greedy Approach)Document7 pagesTravelling Salesman Problem (Greedy Approach)Elangovan MNo ratings yet
- Chapter 3 Searching and PlanningDocument104 pagesChapter 3 Searching and PlanningTemesgenNo ratings yet
- DAA PPT - Unit - IVDocument9 pagesDAA PPT - Unit - IVAbhinavKundraNo ratings yet