Download as pdf or txt
You might also like
- 2004 - Rakha - Development of VT-Micro Model For Estimating EmissionsDocument26 pages2004 - Rakha - Development of VT-Micro Model For Estimating EmissionssofiaNo ratings yet
- Riverside Museum Zaha HadidDocument13 pagesRiverside Museum Zaha HadidNitaNurhayati0% (1)
- 42 Firb (EWGT2006)Document15 pages42 Firb (EWGT2006)guido gentileNo ratings yet
- Two-Lane Traffic Simulations With A Blockage Induced by An Accident CarDocument8 pagesTwo-Lane Traffic Simulations With A Blockage Induced by An Accident CarAnatta OngNo ratings yet
- Cover Page - NothingDocument4 pagesCover Page - Nothingupasara_wulung_1980No ratings yet
- Automatas Celulares ObregonDocument103 pagesAutomatas Celulares ObregonYeferson VelascoNo ratings yet
- CTRG2015 Submission 464Document12 pagesCTRG2015 Submission 464Sri RamyaNo ratings yet
- Dynamic System-Optimal Traffic Assignment Using A State Space Model'Document22 pagesDynamic System-Optimal Traffic Assignment Using A State Space Model'wendersoncsdepNo ratings yet
- Fundamental Principles of Traffic Flow Traffic Flow TheoryDocument4 pagesFundamental Principles of Traffic Flow Traffic Flow TheoryGerly Joy MaquilingNo ratings yet
- Time and Space Discretization in Dynamic Traffic Assignment ModelsDocument10 pagesTime and Space Discretization in Dynamic Traffic Assignment Modelsguido gentileNo ratings yet
- ITS and Traffic Management: M. PapageorgiouDocument60 pagesITS and Traffic Management: M. PapageorgiouShubham ShekharNo ratings yet
- Transportation and Traffic TheoryDocument21 pagesTransportation and Traffic TheorysaobracajniNo ratings yet
- Chap6 Trafic BookDocument33 pagesChap6 Trafic BookAndres orozcoNo ratings yet
- Modelling, Simulation Methods For Intelligent Transportation SystemsDocument23 pagesModelling, Simulation Methods For Intelligent Transportation SystemsSam N SamNo ratings yet
- Analysis and Simulation of Traffic Flow: Temo BardzimashviliDocument11 pagesAnalysis and Simulation of Traffic Flow: Temo BardzimashvilijcrivasplataNo ratings yet
- Fuzzy Traffic Light Control Using Cellular Automata For Urban TrafficDocument8 pagesFuzzy Traffic Light Control Using Cellular Automata For Urban TrafficUsman TariqNo ratings yet
- Capacity Planning - MBA AssignmentDocument20 pagesCapacity Planning - MBA AssignmentLaura MohiuddinNo ratings yet
- Macroscopic Modeling of Traffic in Cities PDFDocument21 pagesMacroscopic Modeling of Traffic in Cities PDFasdas zuzuyanNo ratings yet
- Estimating Vehicle Speed From Tra C Count and Occupancy DataDocument14 pagesEstimating Vehicle Speed From Tra C Count and Occupancy DataEngr Muhammad SohailNo ratings yet
- Variations in Capacity and Delay Estimates From Microscopic Traffic Simulation ModelsDocument9 pagesVariations in Capacity and Delay Estimates From Microscopic Traffic Simulation ModelsjoehassNo ratings yet
- Applied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceDocument14 pagesApplied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceJuan VillacísNo ratings yet
- S2 201700035 Fierek Sawicki Ver2Document12 pagesS2 201700035 Fierek Sawicki Ver2Szymon FierekNo ratings yet
- 2009 Chaudry RanjitkarDocument15 pages2009 Chaudry RanjitkarAskhin Al ImranNo ratings yet
- Evaluation of Impacts of Adaptive Cruise Control On Mixed Traffic FlowDocument8 pagesEvaluation of Impacts of Adaptive Cruise Control On Mixed Traffic FlowGrandis AdiatmaNo ratings yet
- Paper 8-Spontaneous-Braking and Lane-Changing Effect On Traffic Congestion Using Cellular Automata Model Applied To The Two-Lane TrafficDocument9 pagesPaper 8-Spontaneous-Braking and Lane-Changing Effect On Traffic Congestion Using Cellular Automata Model Applied To The Two-Lane TrafficEditor IJACSANo ratings yet
- Roundabout Arm Capacity Determined by Microsimulation and Discrete Functions TechniqueDocument17 pagesRoundabout Arm Capacity Determined by Microsimulation and Discrete Functions TechniqueSadullah AvdiuNo ratings yet
- Traffic Simulation ModelingDocument3 pagesTraffic Simulation ModelingAyesha awanNo ratings yet
- A Capacity-Restraint Transit Assignment Model When A Predetermination Method Indicates The Invalidity of Time IndependenceDocument22 pagesA Capacity-Restraint Transit Assignment Model When A Predetermination Method Indicates The Invalidity of Time IndependencePratik JhaNo ratings yet
- Modeling Connectivity of Inter-Vehicle Communication Systems With Road-Side StationsDocument6 pagesModeling Connectivity of Inter-Vehicle Communication Systems With Road-Side Stationsralucutza_neculaNo ratings yet
- link nodeDocument6 pageslink nodeSrishti SagarNo ratings yet
- Use of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysDocument19 pagesUse of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysIndra PanggaloNo ratings yet
- Calibration of Macroscopic Traffic Flow Model For Nepalese RoadsDocument8 pagesCalibration of Macroscopic Traffic Flow Model For Nepalese RoadsFelipe DSNo ratings yet
- TRAFFIC ENGINEERING MIDTERM SOLUTIONS - ÇAĞDAŞ ESMER-dönüştürüldüDocument3 pagesTRAFFIC ENGINEERING MIDTERM SOLUTIONS - ÇAĞDAŞ ESMER-dönüştürüldüÇağdaş EsmerNo ratings yet
- UpdatedDocument22 pagesUpdatedMAAZ KHANNo ratings yet
- 2012 Cathy CTMDocument14 pages2012 Cathy CTMAamaniVeeranamNo ratings yet
- Large-Scale Agent-Based Traffic Micro-Simulation ExperiencesDocument6 pagesLarge-Scale Agent-Based Traffic Micro-Simulation ExperiencesMubashir SheheryarNo ratings yet
- Route Assignment - WikipediaDocument8 pagesRoute Assignment - Wikipediaabacus deeNo ratings yet
- A Queueing Based Traffic Flow ModelDocument23 pagesA Queueing Based Traffic Flow ModelTanuj VermaNo ratings yet
- 52 GLTMandDUE (DTA2008)Document17 pages52 GLTMandDUE (DTA2008)guido gentileNo ratings yet
- Updated 1Document12 pagesUpdated 1MAAZ KHANNo ratings yet
- Comparison of Greenshields, Pipes, and Van Aerde ..... READ..... VIPDocument15 pagesComparison of Greenshields, Pipes, and Van Aerde ..... READ..... VIPZaid Mohammad AlRababah100% (1)
- Manto Carlo MethodDocument9 pagesManto Carlo MethodSri KanthNo ratings yet
- Traffic Flow and Analysis of RoadsDocument14 pagesTraffic Flow and Analysis of RoadsJayson J. Pagal100% (1)
- Simulation Building ModelDocument3 pagesSimulation Building ModelaminaNo ratings yet
- A Novel Meso-Dynamic Simulation Model of TrafficDocument4 pagesA Novel Meso-Dynamic Simulation Model of TrafficEmilio MallquiNo ratings yet
- 3 RouteAndLocationChoice SpecialDocument10 pages3 RouteAndLocationChoice SpecialjessicaNo ratings yet
- Calibration of Macroscopic Traffic Flow Model For Nepalese RoadsDocument8 pagesCalibration of Macroscopic Traffic Flow Model For Nepalese RoadsHemant TiwariNo ratings yet
- Simulation and Application of Urban Intersection Traffic Flow ModelDocument8 pagesSimulation and Application of Urban Intersection Traffic Flow ModelJaime MaximilianoNo ratings yet
- Mathematical Traffic Load Modelling andDocument38 pagesMathematical Traffic Load Modelling andKhalilNo ratings yet
- Optimal Vehicle Routing With Real-Time Traffic Information: Seongmoon KimDocument31 pagesOptimal Vehicle Routing With Real-Time Traffic Information: Seongmoon KimmillatinampNo ratings yet
- Research ArticleDocument14 pagesResearch Articleyoseph dejeneNo ratings yet
- Hiiden Markov ModelDocument11 pagesHiiden Markov ModelAbdul HalimNo ratings yet
- Polling-Systems-Based Autonomous Vehicle Coordination in Traffic Intersections With No Traffic SignalsDocument15 pagesPolling-Systems-Based Autonomous Vehicle Coordination in Traffic Intersections With No Traffic Signals2331600No ratings yet
- 2021 - EVACES - Tokyo - Fleet Monitoring - Using Sensors in A Fleet of Passing Vehicles To Monitory Health of BridgeDocument10 pages2021 - EVACES - Tokyo - Fleet Monitoring - Using Sensors in A Fleet of Passing Vehicles To Monitory Health of BridgeNqtmquin NtqmquinNo ratings yet
- Sensors: Traffic Estimation For Large Urban Road Network With High Missing Data RatioDocument16 pagesSensors: Traffic Estimation For Large Urban Road Network With High Missing Data RatioJokosystems NigeriaNo ratings yet
- TC KinematicDocument21 pagesTC KinematicMarius DiaconuNo ratings yet
- Greenshields Model and Its LegacyDocument8 pagesGreenshields Model and Its LegacyNabeelSaleemNo ratings yet
- Development of Traffic Flow Model On Suburban RoadDocument21 pagesDevelopment of Traffic Flow Model On Suburban RoadRupayan MondalNo ratings yet
- Model-Based Traffic Control For Balanced Reduction of Fuel Consumption, Emissions, and Travel TimeDocument6 pagesModel-Based Traffic Control For Balanced Reduction of Fuel Consumption, Emissions, and Travel TimeFlavio Vilca pintoNo ratings yet
- Two-Stream Multi-Channel Convolutional Neural Network (TM-CNN) For Multi-Lane Traffic Speed Prediction Considering Traffic Volume ImpactDocument9 pagesTwo-Stream Multi-Channel Convolutional Neural Network (TM-CNN) For Multi-Lane Traffic Speed Prediction Considering Traffic Volume ImpactsparkshockNo ratings yet
- The Traffic Assignment Problem: Models and MethodsFrom EverandThe Traffic Assignment Problem: Models and MethodsRating: 5 out of 5 stars5/5 (1)
- Matlab Tutorial: Getting StartedDocument25 pagesMatlab Tutorial: Getting StartedGITAM UNIVERISTYNo ratings yet
- Carbon Dioxide Emissions of ConcreteDocument52 pagesCarbon Dioxide Emissions of ConcreteAndres Felipe Perez MarinNo ratings yet
- TLWG 2marksDocument10 pagesTLWG 2marksElakya PrabhuNo ratings yet
- Ferrous & Non Ferrous Material PropertiesDocument6 pagesFerrous & Non Ferrous Material PropertiesTusharNo ratings yet
- Operating Manual: Weighing Indicator CTBDocument9 pagesOperating Manual: Weighing Indicator CTBdgiovanniiNo ratings yet
- Manual de Instalación IP Mux-24Document224 pagesManual de Instalación IP Mux-24Alejandro Vera Solis100% (1)
- F3 2019 Hewland Gearbox Manual & Spare Parts Issue 28 08 2019Document51 pagesF3 2019 Hewland Gearbox Manual & Spare Parts Issue 28 08 2019dsk2xfjjc8No ratings yet
- Planetary DrivesDocument277 pagesPlanetary DrivesalopezvillavicencioNo ratings yet
- BMW Group Plant Debrecen Careers - 2Document2 pagesBMW Group Plant Debrecen Careers - 2Shivanshu PandeyNo ratings yet
- EE Courses Description 2015Document12 pagesEE Courses Description 2015Rajeev ValunjkarNo ratings yet
- Esc201: Introduction To Electronics: Amit Verma Dept. of Electrical Engineering Iit KanpurDocument33 pagesEsc201: Introduction To Electronics: Amit Verma Dept. of Electrical Engineering Iit KanpurPrakhar chhalotreNo ratings yet
- The Occupational Safety and Health (No.15 of 2007) PDFDocument244 pagesThe Occupational Safety and Health (No.15 of 2007) PDFWinstone AudiNo ratings yet
- EASA Automation Policy - Michel MassonDocument34 pagesEASA Automation Policy - Michel MassonAvtipsNo ratings yet
- Chemical Reaction and EquationsDocument2 pagesChemical Reaction and EquationsAmanda LopesNo ratings yet
- Carel Humisteam X-Plus Steam Humidifiers BrochureDocument4 pagesCarel Humisteam X-Plus Steam Humidifiers Brochuree-ComfortUSANo ratings yet
- When He Fell For MeDocument543 pagesWhen He Fell For MeDivina Luiza FantonialNo ratings yet
- Coen445 Lab4 Socket ProgrammingDocument10 pagesCoen445 Lab4 Socket ProgrammingBansIa ShobhitNo ratings yet
- SANFLO PE Manholes CatalogDocument12 pagesSANFLO PE Manholes CataloganandNo ratings yet
- Pedestrian Loads and Dynamic Performances of Lively Footbridges An OverviewDocument35 pagesPedestrian Loads and Dynamic Performances of Lively Footbridges An OverviewJhon Sanchez100% (1)
- AODDs and Viscosity FluidsDocument3 pagesAODDs and Viscosity FluidsDarshan PatelNo ratings yet
- Fire Piping Installation and FlushingDocument7 pagesFire Piping Installation and Flushingsunny_84tNo ratings yet
- FAG Housing For TMDocument2 pagesFAG Housing For TMSahil KumarNo ratings yet
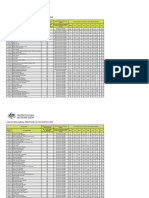
- Skills Priority List - September 2023Document39 pagesSkills Priority List - September 202311A8.01. Hoàng Phú AnNo ratings yet
- Method Statement Tap X R1 211022Document121 pagesMethod Statement Tap X R1 211022Swami NathanNo ratings yet
- Vademecum Eiffel 2019 en PDFDocument8 pagesVademecum Eiffel 2019 en PDFMais OmarNo ratings yet
- Archprogramming Exhibit ADocument2 pagesArchprogramming Exhibit AshipwreckwaveNo ratings yet
- Lokozo Led Grow Light Rev00Document8 pagesLokozo Led Grow Light Rev00manishraut248No ratings yet
- Ip Phone System: Coovox Series-U50Document14 pagesIp Phone System: Coovox Series-U50Jose ZambranoNo ratings yet