Download as pdf or txt
You might also like
- 拖航計畫 (金柏麗) Merged MergedDocument12 pages拖航計畫 (金柏麗) Merged MergedJu-ching ShiuNo ratings yet
- ADINA流体与流固耦合功能的高级应用Document345 pagesADINA流体与流固耦合功能的高级应用beiduduNo ratings yet
- 船舶管理Document53 pages船舶管理STM Works100% (1)
- HUll VibrationDocument59 pagesHUll Vibrationxzxxzxxzxabc163.comNo ratings yet
- 海洋工程结构设计和评估环境条件应用指南(2021 04 01)Document210 pages海洋工程结构设计和评估环境条件应用指南(2021 04 01)cui jackyNo ratings yet
- Orcaflex 基础介绍Document38 pagesOrcaflex 基础介绍Zhiqiang GuNo ratings yet
- DNVGL-CG-0127 Finite Element Analysis中文Document93 pagesDNVGL-CG-0127 Finite Element Analysis中文cxwNo ratings yet
- 海巡應用科技 Applied Technology in Coast Guard MissionsDocument59 pages海巡應用科技 Applied Technology in Coast Guard MissionsSTM WorksNo ratings yet
- 船级社与船旗国的关系 孙晓健Document4 pages船级社与船旗国的关系 孙晓健Elijah ChanNo ratings yet
- 西南交大《有限元方法》课件 赵华主讲02Document115 pages西南交大《有限元方法》课件 赵华主讲02Zhiqiang GuNo ratings yet
- 土壤彈簧文獻彙整Document4 pages土壤彈簧文獻彙整北科大-何玗芸No ratings yet
- 专题05 函数的概念与性质(难点) 2021 2022学年高一数学期中考试好题汇编(苏教版2019必修第一册)(原卷版)Document6 pages专题05 函数的概念与性质(难点) 2021 2022学年高一数学期中考试好题汇编(苏教版2019必修第一册)(原卷版)Chris DingNo ratings yet
- 1T Electric Capstan NINGBO KAIRONG SHIP MACHINERYDocument12 pages1T Electric Capstan NINGBO KAIRONG SHIP MACHINERYjohn smithNo ratings yet
- 1 5螺栓設計Document41 pages1 5螺栓設計E74096027林立妤No ratings yet
- 2、压力容器应力分析Document130 pages2、压力容器应力分析King1971No ratings yet
- Engine Accessories D12.42 Euro IIDocument16 pagesEngine Accessories D12.42 Euro IIAlfie b. bagsaoNo ratings yet
- BRAKE TEST KIT-澳大利亚水域航行船舶安全提示-No.51Document7 pagesBRAKE TEST KIT-澳大利亚水域航行船舶安全提示-No.51Hui ChenNo ratings yet
- OCIMF Mooring Equipment StandardDocument16 pagesOCIMF Mooring Equipment StandardBlake Lee0% (3)
- 有限元分析基础教程Document343 pages有限元分析基础教程Zhiqiang GuNo ratings yet
- UntitledDocument337 pagesUntitledweihuanNo ratings yet
- Drawings ListfdgdgfdDocument17 pagesDrawings ListfdgdgfdGeorge ColceruNo ratings yet
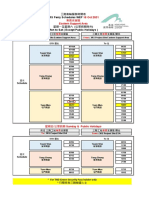
- Ferry Schedule (ESA)Document1 pageFerry Schedule (ESA)Ming WuNo ratings yet
- windcraft 涡轮风力发电机介绍PPTDocument50 pageswindcraft 涡轮风力发电机介绍PPTBalázsCsizikNo ratings yet
- Pvoc GuideDocument314 pagesPvoc GuidePerrytkNo ratings yet
- Port Work ManualDocument191 pagesPort Work ManualYan LucienNo ratings yet
- 安全使用和操作吊船工作守則Document61 pages安全使用和操作吊船工作守則030093No ratings yet
- 鋼板 噴砂標準Document31 pages鋼板 噴砂標準胡世國No ratings yet
- 1.5 EFDC Explorer8.1 Chinese User GuideDocument393 pages1.5 EFDC Explorer8.1 Chinese User GuidejulialzateNo ratings yet
- 第6章波Document97 pages第6章波elty TanNo ratings yet
- 選修物理 課本 第2章Document65 pages選修物理 課本 第2章elty TanNo ratings yet
- UFO重力操纵物理Document41 pagesUFO重力操纵物理怪圈麦田No ratings yet
- 梅耳得實驗 202209Document6 pages梅耳得實驗 2022090510204asdNo ratings yet
- 波流交互作用下底床反應Document6 pages波流交互作用下底床反應Mr SandalsNo ratings yet
- 东海大桥海上风电场基础波浪理论分析 戴国亮Document6 pages东海大桥海上风电场基础波浪理论分析 戴国亮Enbo SunNo ratings yet
- 大学物理的基本原理Document18 pages大学物理的基本原理kingviewNo ratings yet
- 楞次定律自由能提取Guidelines to Bucking Coils全部翻译版本49页Document49 pages楞次定律自由能提取Guidelines to Bucking Coils全部翻译版本49页woyaoxiaxiaNo ratings yet
- 第2节 重力坝 荷载及荷载组合Document43 pages第2节 重力坝 荷载及荷载组合limfoohoatNo ratings yet
- 波浪场中弹性薄板的动力响应 张鹏Document90 pages波浪场中弹性薄板的动力响应 张鹏帅华蒋No ratings yet
- 超声光栅Document13 pages超声光栅aojockerNo ratings yet
- 56798808Document208 pages56798808yungmingsungNo ratings yet
- 01 Me 2011 - 000Document8 pages01 Me 2011 - 000Ti AnnelNo ratings yet
- 高中物理總複習Document122 pages高中物理總複習TaneltyNo ratings yet
- UntitledDocument84 pagesUntitled孟君No ratings yet
- annurev.fluid.33.1.415 的翻譯版本 PDFDocument31 pagesannurev.fluid.33.1.415 的翻譯版本 PDF林忠緯No ratings yet
- 空气动力学基础复习 蹦蹦专用Document37 pages空气动力学基础复习 蹦蹦专用Maitri ParamithaNo ratings yet
- Chapter 6Document25 pagesChapter 6TaiYuan-YenNo ratings yet
- 1 绪论Document38 pages1 绪论yareqNo ratings yet
- CH10 PDFDocument36 pagesCH10 PDF王奕凱No ratings yet
- 10.1121@10.0001109 ZHDocument17 pages10.1121@10.0001109 ZHly731860879No ratings yet
- MnCu合金热弹性马氏体相变过程中的非线性内耗行为 刘军民Document10 pagesMnCu合金热弹性马氏体相变过程中的非线性内耗行为 刘军民Zhe steveNo ratings yet
- Exam Theory Q2 ChineseDocument5 pagesExam Theory Q2 Chineseyiqi wuNo ratings yet
- Rapid Method For Acoustic Wave Equation WTW Inversion of Crosshole Seismic DataDocument7 pagesRapid Method For Acoustic Wave Equation WTW Inversion of Crosshole Seismic DataRac RaKyeNo ratings yet
- 固体理论读书笔记Document23 pages固体理论读书笔记yinchenNo ratings yet
- 自由端狭缝吸气控制三维方柱绕流Document9 pages自由端狭缝吸气控制三维方柱绕流Nan GaoNo ratings yet
- 大振幅波浪下高速單體船之整體結構反應分析Document8 pages大振幅波浪下高速單體船之整體結構反應分析Chen Chu-yunNo ratings yet
- UntitledDocument22 pagesUntitledsusuNo ratings yet
- 第一章概論Document4 pages第一章概論SSsvNo ratings yet
- 冰区海上风机的动力响应及疲劳分析Document5 pages冰区海上风机的动力响应及疲劳分析yangyangaNo ratings yet
- UntitledDocument10 pagesUntitledLing XuNo ratings yet
- 上課簡報01 大氣邊界層Document34 pages上課簡報01 大氣邊界層Leung Kai NapNo ratings yet
- UPSR SC NotesDocument17 pagesUPSR SC NotesH'NG EE JOE MoeNo ratings yet
- 智能电网可再生能源系统设计.pdf by 智能电网可再生能源系统设计 PDFDocument458 pages智能电网可再生能源系统设计.pdf by 智能电网可再生能源系统设计 PDFYUCHENG GUONo ratings yet
- 菁泉科技股份有限公司 總經理 周錦志Document64 pages菁泉科技股份有限公司 總經理 周錦志billNo ratings yet
- 現代性與末世論 PDFDocument393 pages現代性與末世論 PDFAeewonge1211No ratings yet
- PHYF4Document20 pagesPHYF4Andy HungNo ratings yet