Download as pdf or txt
You might also like
- Proposed Changes To Marijuana LawDocument165 pagesProposed Changes To Marijuana LawJessie BalmertNo ratings yet
- 22-02-13 Samsung Answer To Staton Techniya Complaint & CounterclaimsDocument72 pages22-02-13 Samsung Answer To Staton Techniya Complaint & CounterclaimsFlorian MuellerNo ratings yet
- Yashica Electro 8 LD 6Document2 pagesYashica Electro 8 LD 6Francisco Javier Madueño ValeroNo ratings yet
- 22-04-14 ITC-1299 Apple's Answer To Ericsson's ComplaintDocument114 pages22-04-14 ITC-1299 Apple's Answer To Ericsson's ComplaintFlorian MuellerNo ratings yet
- 21-12-23 Philips Motion To Reopen Record Re. French ProceedingsDocument272 pages21-12-23 Philips Motion To Reopen Record Re. French ProceedingsFlorian MuellerNo ratings yet
- Puts Column 28-90 MM Leica R LensesDocument10 pagesPuts Column 28-90 MM Leica R LensesDaniels PicturesNo ratings yet
- CLN35 Bokeh enDocument45 pagesCLN35 Bokeh enreplik1212No ratings yet
- Panavision LensesDocument48 pagesPanavision Lensesraviitherising100% (1)
- SekonicL 358 L 558RBrochureDocument16 pagesSekonicL 358 L 558RBrochureCorneliu ModilcaNo ratings yet
- Broncolor Studio Light Monolights Minicomrfs enDocument12 pagesBroncolor Studio Light Monolights Minicomrfs eneternal_harpyNo ratings yet
- Canon Eos 70dDocument2 pagesCanon Eos 70dSandro Campagnoli0% (1)
- SIGMA LENS CatalogueDocument15 pagesSIGMA LENS CatalogueDeeNo ratings yet
- HC Lens Book v2Document37 pagesHC Lens Book v2Juriy SmirnovNo ratings yet
- X Pro1tgDocument13 pagesX Pro1tgchristianNo ratings yet
- Camera Mounts Sorted by RegisterDocument4 pagesCamera Mounts Sorted by RegisterBill Chan ChandlerNo ratings yet
- Arri Digital Camera BasicsDocument13 pagesArri Digital Camera BasicsCosmina Badescu100% (1)
- Nikon F2 Photomic DP2 Metered PrismDocument2 pagesNikon F2 Photomic DP2 Metered Prismtja892292No ratings yet
- Koni-Omega Rapid PDFDocument25 pagesKoni-Omega Rapid PDFHabibiy StauffanbergNo ratings yet
- 20 Years of Canon EOSDocument11 pages20 Years of Canon EOSrobertcheNo ratings yet
- Instruction Manual Mount Change Instructions Zeiss Cinema Zoom LensesDocument24 pagesInstruction Manual Mount Change Instructions Zeiss Cinema Zoom LensesdimodimoNo ratings yet
- Camera Kiev 88Document16 pagesCamera Kiev 88Mariano RuffoNo ratings yet
- History: Camera Lenses Focal Length Viewfinder MirrorDocument8 pagesHistory: Camera Lenses Focal Length Viewfinder MirrorLemuel BacliNo ratings yet
- Purchasing A New LensDocument22 pagesPurchasing A New LensrocarlovichNo ratings yet
- Hasselblad Historical - Focal Length ComparisonsDocument3 pagesHasselblad Historical - Focal Length ComparisonsBrad BaoNo ratings yet
- Lenses Accessories Catalogue 01Document19 pagesLenses Accessories Catalogue 01szordinNo ratings yet
- ACP Lubitel 2Document6 pagesACP Lubitel 2farah hNo ratings yet
- Minolta Hi-Matic 7sDocument41 pagesMinolta Hi-Matic 7sAnonymous eBZoT7eNo ratings yet
- MasterTechnika Engl PDFDocument7 pagesMasterTechnika Engl PDFNikolaos TsiourisNo ratings yet
- EOS 50D and 5D Mark II White Paper 2Document77 pagesEOS 50D and 5D Mark II White Paper 2Michele Mik del VecchioNo ratings yet
- Nikon Nikkormat Ft2 ColorDocument0 pagesNikon Nikkormat Ft2 ColorpnimannNo ratings yet
- Bronica EtrsDocument49 pagesBronica EtrsMariusz StaniszewskiNo ratings yet
- D3000 BrochureDocument9 pagesD3000 BrochurereesecorazaNo ratings yet
- EOS - 7D Brochure V 2Document16 pagesEOS - 7D Brochure V 2dkahunaNo ratings yet
- Fujinon LF LaterDocument12 pagesFujinon LF Lateric-racer100% (1)
- Mamiya RB67 - Pro-S - v7Document40 pagesMamiya RB67 - Pro-S - v7hermesperaNo ratings yet
- EXS500 RepairDocument32 pagesEXS500 RepairdogshitassholeNo ratings yet
- Flexaret VIIaDocument5 pagesFlexaret VIIakhaozdesignNo ratings yet
- F80 UserManualDocument59 pagesF80 UserManualflorinelvvNo ratings yet
- Yashica FX-3 FX-7: Back To Main On-Line Manual PageDocument16 pagesYashica FX-3 FX-7: Back To Main On-Line Manual Pageteguh santosoNo ratings yet
- Bronica ETR-Si Medium Format Film Camera Owners ManualDocument31 pagesBronica ETR-Si Medium Format Film Camera Owners ManualIgor ErženNo ratings yet
- Leicaflex sl2Document40 pagesLeicaflex sl2David GunnNo ratings yet
- The LEE System BrochureDocument33 pagesThe LEE System BrochureIvo Vitanov VelinovNo ratings yet
- Your Dream Camera:: A DIY Project GuideDocument24 pagesYour Dream Camera:: A DIY Project GuideMichal SlavNo ratings yet
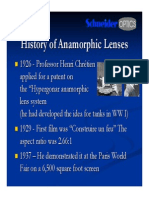
- History of Anamorphic SchneiderDocument13 pagesHistory of Anamorphic SchneiderAnonymous RRYuFXtKNo ratings yet
- 205TCCDocument16 pages205TCCKwanghoon Ken KimNo ratings yet
- S2A ManualDocument41 pagesS2A ManualvepsalainenNo ratings yet
- Nikon FM INSTRUCTION MANUALDocument35 pagesNikon FM INSTRUCTION MANUALlae_vacaroiu100% (1)
- Service Manual SONY DCR-HC23EHC24EHC26HC26EHC35EDocument60 pagesService Manual SONY DCR-HC23EHC24EHC26HC26EHC35Eelotillo100% (2)
- LPL7452 PDFDocument16 pagesLPL7452 PDFLucian Bran0% (1)
- Focal Plane ShuttersDocument17 pagesFocal Plane ShuttersseifadiazNo ratings yet
- Chinon cm-1Document20 pagesChinon cm-1John PapasNo ratings yet
- Digitare eDocument14 pagesDigitare eGuyIncognito314No ratings yet
- F Number PDFDocument6 pagesF Number PDFnandan akNo ratings yet
- Voigtlander Vito CL CLRDocument26 pagesVoigtlander Vito CL CLRMongkolayaNo ratings yet
- Lee FiltersDocument8 pagesLee FiltersRocio González NavarroNo ratings yet
- Catalogo Runafoto Storeee PDFDocument52 pagesCatalogo Runafoto Storeee PDFnamapaNo ratings yet
- Canon Canovision 8 Manual English Ma 2439Document17 pagesCanon Canovision 8 Manual English Ma 2439Ian88No ratings yet
- Pentax k2 User ManualDocument37 pagesPentax k2 User ManualJohnny PanamaNo ratings yet
- Olympus OM-D E-M1 Mark III: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsFrom EverandOlympus OM-D E-M1 Mark III: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsNo ratings yet
- H.264 / MPEG-4 Part 10: Inter PredictionDocument3 pagesH.264 / MPEG-4 Part 10: Inter PredictionvinithakvNo ratings yet
- CH: 7 Fundamentals of Video CodingDocument13 pagesCH: 7 Fundamentals of Video Codingkd17209No ratings yet
- A Probabilistic Model of Visual CryptographyDocument7 pagesA Probabilistic Model of Visual CryptographyJAYAPRAKASHNo ratings yet
- 22-04-20 Tesla Honda Toyota AcbDocument27 pages22-04-20 Tesla Honda Toyota AcbFlorian MuellerNo ratings yet
- 22-06-07 EDTX Mediation UnsuccessfulDocument2 pages22-06-07 EDTX Mediation UnsuccessfulFlorian MuellerNo ratings yet
- United States Court of Appeals For The Fifth Circuit: Plaintiff-AppellantDocument32 pagesUnited States Court of Appeals For The Fifth Circuit: Plaintiff-AppellantFlorian MuellerNo ratings yet
- 22-05-04 Ericsson Opposition To Apple's Motion To StayDocument7 pages22-05-04 Ericsson Opposition To Apple's Motion To StayFlorian MuellerNo ratings yet
- 22-04-06 IPCom & Sprint Notice of SettlementDocument5 pages22-04-06 IPCom & Sprint Notice of SettlementFlorian MuellerNo ratings yet
- 22-04-19 Professors' Acb ISO Petition For RehearingDocument24 pages22-04-19 Professors' Acb ISO Petition For RehearingFlorian MuellerNo ratings yet
- Drinker Biddle: Faegre & Reath LLPDocument24 pagesDrinker Biddle: Faegre & Reath LLPFlorian MuellerNo ratings yet
- 22-04-22 Sol IP v. Ford Amended Patent Infringement ComplaintDocument153 pages22-04-22 Sol IP v. Ford Amended Patent Infringement ComplaintFlorian MuellerNo ratings yet
- 22-04-01 PTAB Apple IPR2022-00715 U.S. Patent 8792454Document69 pages22-04-01 PTAB Apple IPR2022-00715 U.S. Patent 8792454Florian MuellerNo ratings yet
- 22-04-20 VDA AllianceAutoInno AcbDocument32 pages22-04-20 VDA AllianceAutoInno AcbFlorian MuellerNo ratings yet
- 22-03-31 Two Profs ISO Apple On Sec 1 AcbDocument33 pages22-03-31 Two Profs ISO Apple On Sec 1 AcbFlorian MuellerNo ratings yet
- 22-04-20 Thales AcbDocument33 pages22-04-20 Thales AcbFlorian MuellerNo ratings yet
- Ericsson Inc. and Telefonaktiebolaget LM Ericsson, Plaintiffs V Apple Inc., Defendant. Civil Action No. 2:21-cv-376Document9 pagesEricsson Inc. and Telefonaktiebolaget LM Ericsson, Plaintiffs V Apple Inc., Defendant. Civil Action No. 2:21-cv-376Florian Mueller100% (1)
- Petition For Inter Partes Review OF U.S. PATENT NO. 9,705,400Document87 pagesPetition For Inter Partes Review OF U.S. PATENT NO. 9,705,400Florian MuellerNo ratings yet
- 22-04-04 ITC-1301 Apple Answer To ComplaintDocument49 pages22-04-04 ITC-1301 Apple Answer To ComplaintFlorian MuellerNo ratings yet
- 22-04-04 ITC-1302 Ericsson Response To Apple ComplaintDocument38 pages22-04-04 ITC-1302 Ericsson Response To Apple ComplaintFlorian MuellerNo ratings yet
- 22-03-31 Roblox AcbDocument12 pages22-03-31 Roblox AcbFlorian MuellerNo ratings yet
- 22-04-04 ITC-1300 Apple Answer To ComplaintDocument64 pages22-04-04 ITC-1300 Apple Answer To ComplaintFlorian MuellerNo ratings yet
- 22-04-06 EDTX376 Apple Answer & CC To Ericsson 1st Am Compl PDFDocument61 pages22-04-06 EDTX376 Apple Answer & CC To Ericsson 1st Am Compl PDFFlorian MuellerNo ratings yet
- 22-03-31 Sol IP v. Ford Motor Company Patent Infringement ComplaintDocument48 pages22-03-31 Sol IP v. Ford Motor Company Patent Infringement ComplaintFlorian MuellerNo ratings yet
- Epic Games, Inc.,: Curiae in Support of Neither PartyDocument36 pagesEpic Games, Inc.,: Curiae in Support of Neither PartyFlorian MuellerNo ratings yet
- 22-03-23 Order On Motions To DismissDocument13 pages22-03-23 Order On Motions To DismissFlorian MuellerNo ratings yet
- 22-03-29 Neo Wireless LLC v. Toyota E.D.tex. ComplaintDocument17 pages22-03-29 Neo Wireless LLC v. Toyota E.D.tex. ComplaintFlorian MuellerNo ratings yet
- 22-03-29 Neo Wireless LLC v. Ford Motor Company W.D. Mo.Document16 pages22-03-29 Neo Wireless LLC v. Ford Motor Company W.D. Mo.Florian MuellerNo ratings yet
- 22-02-15 Ericsson v. Apple Scheduling OrderDocument18 pages22-02-15 Ericsson v. Apple Scheduling OrderFlorian Mueller100% (1)
- United States Court of Appeals For The Fifth Circuit: FiledDocument14 pagesUnited States Court of Appeals For The Fifth Circuit: FiledFlorian MuellerNo ratings yet
- 22-02-17 Scheduling Order Apple v. Ericsson EDTX-460Document18 pages22-02-17 Scheduling Order Apple v. Ericsson EDTX-460Florian MuellerNo ratings yet
- Sojib VaiDocument2 pagesSojib VaiPeash Mredha80% (5)
- Mock Test MSDocument4 pagesMock Test MSrita sehgalNo ratings yet
- CH 12 Consumer ProtectionDocument78 pagesCH 12 Consumer Protectionleena shijuNo ratings yet
- Corrective Action PlanDocument3 pagesCorrective Action Plansohail100% (2)
- HVDC FACTS Lab ManualDocument54 pagesHVDC FACTS Lab Manualhaseeb khan100% (3)
- $RSQWUJADocument1 page$RSQWUJAJob Bank CanadaNo ratings yet
- Comparative Analysis and Optimization of Active Power and Delay of 1-Bit Full Adder at 45 NM TechnologyDocument3 pagesComparative Analysis and Optimization of Active Power and Delay of 1-Bit Full Adder at 45 NM TechnologyNsrc Nano ScientifcNo ratings yet
- Sixty Years of Indian ParliamentDocument19 pagesSixty Years of Indian ParliamentPawan SharmaNo ratings yet
- EUROPART Inter Catalog MB Truck 2014 ENDocument400 pagesEUROPART Inter Catalog MB Truck 2014 ENBoumediene CHIKHAOUINo ratings yet
- Placement Brochure Base FormatDocument17 pagesPlacement Brochure Base FormatER Aditya DasNo ratings yet
- CRISP DM Business UnderstandingDocument18 pagesCRISP DM Business UnderstandingSonaNo ratings yet
- P1 - CHAPTER 10 - KNOWLEDGE CHECK - Relevant Costs and Decision Making - IMASDocument19 pagesP1 - CHAPTER 10 - KNOWLEDGE CHECK - Relevant Costs and Decision Making - IMASYeon Baek100% (1)
- Gender and LaborDocument9 pagesGender and LaborKristine San Luis PotencianoNo ratings yet
- Statement of Work (Sow) For "Recreational Park": ScopeDocument2 pagesStatement of Work (Sow) For "Recreational Park": ScopeIorga MihaiNo ratings yet
- 9 Chapter 6 ConclusionDocument3 pages9 Chapter 6 ConclusionTejas YeoleNo ratings yet
- OSHA Office of Training & Education 1Document78 pagesOSHA Office of Training & Education 1AmeerUlHaqNo ratings yet
- LIC Jeevan Anand Plan PPT Nitin 359Document11 pagesLIC Jeevan Anand Plan PPT Nitin 359Nitin ShindeNo ratings yet
- HCL Safety Data SheetDocument6 pagesHCL Safety Data SheetSuparman KoplakNo ratings yet
- Convolutional Neural Networks in Computer Vision: Jochen LangDocument46 pagesConvolutional Neural Networks in Computer Vision: Jochen LangZichao ZhangNo ratings yet
- Competency Question For UHP ProjectDocument6 pagesCompetency Question For UHP ProjectAshkar Ahamad100% (1)
- ELMORE Et Al-2006-Journal of Applied EcologyDocument10 pagesELMORE Et Al-2006-Journal of Applied EcologyRoy Rogger Yanac MaguiñaNo ratings yet
- Constitutional Basis: Labor Law 2 Integration Notes Basic PropositionsDocument7 pagesConstitutional Basis: Labor Law 2 Integration Notes Basic Propositionscmv mendozaNo ratings yet
- Atari VCS 2600 Supercharger Tape File FormatDocument2 pagesAtari VCS 2600 Supercharger Tape File FormatAlainleGuirecNo ratings yet
- Unit 5 International Monetary SystemDocument19 pagesUnit 5 International Monetary SystemerikericashNo ratings yet
- 2X100V 500W Audio Amplifier SMPS Power Supply - Electronics Projects CircuitsDocument2 pages2X100V 500W Audio Amplifier SMPS Power Supply - Electronics Projects CircuitsK. RAJA SEKARNo ratings yet
- Bradley Stewart ResumeDocument1 pageBradley Stewart ResumeBrad StewartNo ratings yet
- En Ian8k b1000 Msan r330 r340 Icm3ge User v1.4 PDFDocument227 pagesEn Ian8k b1000 Msan r330 r340 Icm3ge User v1.4 PDFمنصورالمغربيNo ratings yet
- Group No Description Remark Mutdate DrawingDocument1 pageGroup No Description Remark Mutdate DrawingCharaf DineNo ratings yet