
32 Congress
32 Congress
You might also like
- Intro To Plastic Injection Molding EbookDocument43 pagesIntro To Plastic Injection Molding EbookJames Farrugia78% (9)
- 1976 McCormick. Computability of Global Solutions To Factorable Nonconvex Programs Part I - Convex Underestimating Problems PDFDocument29 pages1976 McCormick. Computability of Global Solutions To Factorable Nonconvex Programs Part I - Convex Underestimating Problems PDFDimitrisSotiropoulosNo ratings yet
- Mirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationDocument9 pagesMirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationfurbyhaterNo ratings yet
- Duke XC SL Race ServiceDocument10 pagesDuke XC SL Race ServicesilverapeNo ratings yet
- Fixed-Point Iteration Based Algorithm For A ClassDocument13 pagesFixed-Point Iteration Based Algorithm For A ClassNick MantzakourasNo ratings yet
- On Interior-Point Methods, Related Dynamical Systems Results and Cores of Targets For Linear ProgrammingDocument11 pagesOn Interior-Point Methods, Related Dynamical Systems Results and Cores of Targets For Linear ProgramminginventionjournalsNo ratings yet
- Global Convergence of Trust-Region Algorithms For Convex Constrained Minimization Without DerivativesDocument7 pagesGlobal Convergence of Trust-Region Algorithms For Convex Constrained Minimization Without DerivativesEmerson ButynNo ratings yet
- LipsolDocument26 pagesLipsolCmpt CmptNo ratings yet
- Conjugate Gradient MethodDocument8 pagesConjugate Gradient MethodDavid HumeNo ratings yet
- A new trust region method for unconstrained optimization: 夡 Zhen-Jun Shi, Jin-Hua GuoDocument12 pagesA new trust region method for unconstrained optimization: 夡 Zhen-Jun Shi, Jin-Hua GuoElham AtlassiNo ratings yet
- Global Convergence of A Trust-Region Sqp-Filter Algorithm For General Nonlinear ProgrammingDocument25 pagesGlobal Convergence of A Trust-Region Sqp-Filter Algorithm For General Nonlinear ProgrammingAndressa PereiraNo ratings yet
- Course Notes: Week 2.: Math 270C: Applied Numerical Linear AlgebraDocument8 pagesCourse Notes: Week 2.: Math 270C: Applied Numerical Linear AlgebraShwetabh SrivastavaNo ratings yet
- Goldfarb IdnaniDocument33 pagesGoldfarb Idnanifzhang756115100% (1)
- Gradient Methods For Minimizing Composite Objective FunctionDocument31 pagesGradient Methods For Minimizing Composite Objective Functionegv2000No ratings yet
- Mechanical Engineering Program COPPE / Federal University of Rio de Janeiro Caixa Postal 68503, 21945-970 Rio de Janeiro, BRAZILDocument46 pagesMechanical Engineering Program COPPE / Federal University of Rio de Janeiro Caixa Postal 68503, 21945-970 Rio de Janeiro, BRAZILEdward Quijada OrellanaNo ratings yet
- Steepest DescentDocument7 pagesSteepest DescentstankccNo ratings yet
- Quadratic ProgrammingDocument19 pagesQuadratic Programmingjabir sulaimanNo ratings yet
- Interactive Water SurfacesDocument10 pagesInteractive Water SurfacesWu XianchunNo ratings yet
- Improved Approximation Algorithms For The Vertex Cover Problem in Graphs and HypergraphsDocument16 pagesImproved Approximation Algorithms For The Vertex Cover Problem in Graphs and HypergraphsRitika JohriNo ratings yet
- Nonlinear Programming Based Sliding Mode Control of An Inverted PendulumDocument5 pagesNonlinear Programming Based Sliding Mode Control of An Inverted Pendulumvirus101No ratings yet
- Local Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXDocument9 pagesLocal Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXhellothapliyalNo ratings yet
- An Algorithm For Quadratic Optimization With One Quadratic Constraint and Bounds On The VariablesDocument9 pagesAn Algorithm For Quadratic Optimization With One Quadratic Constraint and Bounds On The Variablesgijs fehmersNo ratings yet
- Lecture 16: Linear Algebra III: cs412: Introduction To Numerical AnalysisDocument7 pagesLecture 16: Linear Algebra III: cs412: Introduction To Numerical AnalysisZachary MarionNo ratings yet
- Lattice Basis Reduction Improved Practical AlgoritDocument28 pagesLattice Basis Reduction Improved Practical AlgoritSidou SissahNo ratings yet
- W9a Autoencoders PcaDocument7 pagesW9a Autoencoders PcazeliawillscumbergNo ratings yet
- An Algorithm For The Computation of EigenvaluesDocument44 pagesAn Algorithm For The Computation of Eigenvalues孔翔鸿No ratings yet
- An Analytical Method For Linear Elliptic Pdes and Its Numerical ImplementationDocument19 pagesAn Analytical Method For Linear Elliptic Pdes and Its Numerical Implementationlilasaid2010No ratings yet
- Steven L. Mielke Et Al - Extrapolation and Perturbation Schemes For Accelerating The Convergence of Quantum Mechanical Free Energy Calculations Via The Fourier Path-Integral Monte Carlo MethodDocument25 pagesSteven L. Mielke Et Al - Extrapolation and Perturbation Schemes For Accelerating The Convergence of Quantum Mechanical Free Energy Calculations Via The Fourier Path-Integral Monte Carlo MethodWippetsxzNo ratings yet
- Nonlinear Estimation For Linear Inverse Problems With Error in The OperatorDocument27 pagesNonlinear Estimation For Linear Inverse Problems With Error in The OperatorSamina TabassumNo ratings yet
- BPMPD ManualDocument30 pagesBPMPD ManualMarcelo DávalosNo ratings yet
- COMSOL Conf CardiffDocument8 pagesCOMSOL Conf CardiffLexin LiNo ratings yet
- Multigrid Algorithms For Inverse Problems With Linear Parabolic Pde ConstraintsDocument29 pagesMultigrid Algorithms For Inverse Problems With Linear Parabolic Pde Constraintsapi-19973331No ratings yet
- Raptis2019 N QueensDocument16 pagesRaptis2019 N Queensraptis.theophanesNo ratings yet
- Quantum Algorithms For Matchings and Vertex-Colorings in GraphsDocument18 pagesQuantum Algorithms For Matchings and Vertex-Colorings in GraphsSivaRamaKrishnan R.No ratings yet
- Galerkin's Method G U L : Computation Methods For NanoengineeringDocument16 pagesGalerkin's Method G U L : Computation Methods For NanoengineeringmahmoudNo ratings yet
- State RegulatorDocument23 pagesState RegulatorRishi Kant SharmaNo ratings yet
- Gauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelDocument18 pagesGauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelcegarciaNo ratings yet
- Research PaperDocument10 pagesResearch PaperAaron StewartNo ratings yet
- A New Index Calculus Algorithm With Complexity L (1/4 + o (1) ) in Small CharacteristicDocument23 pagesA New Index Calculus Algorithm With Complexity L (1/4 + o (1) ) in Small Characteristicawais04No ratings yet
- NeurIPS 2020 Debiasing Distributed Second Order Optimization With Surrogate Sketching and Scaled Regularization PaperDocument12 pagesNeurIPS 2020 Debiasing Distributed Second Order Optimization With Surrogate Sketching and Scaled Regularization PaperRichard CorneliusNo ratings yet
- A Model-Trust Region Algorithm Utilizing A Quadratic InterpolantDocument11 pagesA Model-Trust Region Algorithm Utilizing A Quadratic InterpolantCândida MeloNo ratings yet
- Numerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodDocument17 pagesNumerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodMárcioBarbozaNo ratings yet
- NLPQLG: A Fortran Implementation of A Sequential Quadratic Programming Algorithm For Heuristic Global Optimization - User's GuideDocument24 pagesNLPQLG: A Fortran Implementation of A Sequential Quadratic Programming Algorithm For Heuristic Global Optimization - User's GuiderudsbrNo ratings yet
- An Adaptive Nonlinear Least-Squares AlgorithmDocument21 pagesAn Adaptive Nonlinear Least-Squares AlgorithmOleg ShirokobrodNo ratings yet
- Statistical Mechanics Lecture Notes (2006), L13Document7 pagesStatistical Mechanics Lecture Notes (2006), L13OmegaUserNo ratings yet
- Neural Nets For OptimizationDocument34 pagesNeural Nets For OptimizationNikolaos MastorakisNo ratings yet
- Molecular Modelling: Lecture 2: Geometry Optimization and Brief Repetition of Statistical ThermodynamicsDocument9 pagesMolecular Modelling: Lecture 2: Geometry Optimization and Brief Repetition of Statistical ThermodynamicsDushyant PatelNo ratings yet
- Algorithms For Bound Constrained Quadratic Programming ProblemsDocument24 pagesAlgorithms For Bound Constrained Quadratic Programming ProblemsasdfNo ratings yet
- 1999 GuntmanDocument29 pages1999 GuntmanFelipeCarraroNo ratings yet
- Algebraic Methods To Compute Mathieu Functions - FrenkelDocument11 pagesAlgebraic Methods To Compute Mathieu Functions - FrenkelJ Jesús Villanueva GarcíaNo ratings yet
- Improved Conic Reformulations For K-Means Clustering: Madhushini Narayana Prasad and Grani A. HanasusantoDocument24 pagesImproved Conic Reformulations For K-Means Clustering: Madhushini Narayana Prasad and Grani A. HanasusantoNo12n533No ratings yet
- Survey of Trust-Region Derivative Free Optimization MethodsDocument12 pagesSurvey of Trust-Region Derivative Free Optimization MethodsMariangela PintoNo ratings yet
- Current Trends in Numerical Linear AlgebraDocument19 pagesCurrent Trends in Numerical Linear Algebramanasdutta3495No ratings yet
- Numerical Experiments With Variations of The Gauss-Newton Algorithm For Nonlinear Least SquaresDocument17 pagesNumerical Experiments With Variations of The Gauss-Newton Algorithm For Nonlinear Least SquaresMárcioBarbozaNo ratings yet
- (David Pisinger) Where Are The Hard Knapsack ProblemsDocument14 pages(David Pisinger) Where Are The Hard Knapsack Problemswalrod22No ratings yet
- EditorialDocument12 pagesEditorialSara ArracheraNo ratings yet
- Hierarchical Matrices and Adaptive CrossDocument10 pagesHierarchical Matrices and Adaptive CrossChee Zhen QiNo ratings yet
- Time Harmonic Maxwell EqDocument16 pagesTime Harmonic Maxwell Eqawais4125No ratings yet
- Math OptimizationDocument11 pagesMath OptimizationAlexander ValverdeNo ratings yet
- Algorithms For Constrained OptimizationDocument22 pagesAlgorithms For Constrained OptimizationnmooseNo ratings yet
- School of Computer Science and Applied MathematicsDocument8 pagesSchool of Computer Science and Applied MathematicsFanta CamaraNo ratings yet
- Siam J. S - C - 1998 Society For Industrial and Applied Mathematics Vol. 19, No. 2, Pp. 364-386, March 1998 003Document23 pagesSiam J. S - C - 1998 Society For Industrial and Applied Mathematics Vol. 19, No. 2, Pp. 364-386, March 1998 003Sidney LinsNo ratings yet
- 08 - Reliability Databases State of ArtDocument38 pages08 - Reliability Databases State of ArtSidney Lins100% (4)
- ASME Sección VIII D1 Non Mandatory Appendices EDocument1 pageASME Sección VIII D1 Non Mandatory Appendices ESidney LinsNo ratings yet
- Asme Sec I A2001Document4 pagesAsme Sec I A2001Sidney LinsNo ratings yet
- Minitab - Quality ControlDocument310 pagesMinitab - Quality ControlRajesh Sharma100% (4)
- Multiobjective Genetic Algorithms Applied To Solve Optimization ProblemsDocument4 pagesMultiobjective Genetic Algorithms Applied To Solve Optimization ProblemsSidney LinsNo ratings yet
- 06 Process ReliabilityDocument12 pages06 Process ReliabilitySidney LinsNo ratings yet
- 04 Reliability DefinitionsDocument3 pages04 Reliability DefinitionsSidney LinsNo ratings yet
- Duality Theory: Berc RustemDocument29 pagesDuality Theory: Berc RustemSidney LinsNo ratings yet
- Motor Torque and Power: J. Michael MccarthyDocument7 pagesMotor Torque and Power: J. Michael MccarthySidney LinsNo ratings yet
- Arnold V I - Mathematical Methods of Classical MechanicsDocument536 pagesArnold V I - Mathematical Methods of Classical MechanicsSidney LinsNo ratings yet
- A First Lab in Circuits and Electronics by YannisDocument139 pagesA First Lab in Circuits and Electronics by YannisSasukeNo ratings yet
- Bank Management System Source CodeDocument5 pagesBank Management System Source CodetheblueartboxNo ratings yet
- CHE 110A Problem Set No. 2: Smith, Van Ness, Abbott, 2.3, Page 56Document2 pagesCHE 110A Problem Set No. 2: Smith, Van Ness, Abbott, 2.3, Page 56Karthika SNo ratings yet
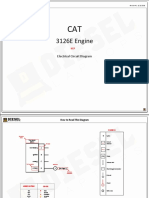
- 3126E Engine: Electrical Circuit DiagramDocument10 pages3126E Engine: Electrical Circuit DiagramPhil B.No ratings yet
- ISA RP3.2-1960 Flange Mounted Sharp Edged Orifice Plate For Flow Measurement PDFDocument8 pagesISA RP3.2-1960 Flange Mounted Sharp Edged Orifice Plate For Flow Measurement PDFamshahNo ratings yet
- Ultra Dense NetworkDocument27 pagesUltra Dense NetworkYounesNo ratings yet
- Client Name: Well, Max Birthdate: AGE: 7 Years, 8 Months School: Grade: 1 Dates of Assessment: July, 2011 Date of Report: Assessed By: FlamesDocument10 pagesClient Name: Well, Max Birthdate: AGE: 7 Years, 8 Months School: Grade: 1 Dates of Assessment: July, 2011 Date of Report: Assessed By: Flamesapi-160674927No ratings yet
- Model Course 1.07 PDFDocument75 pagesModel Course 1.07 PDFShiena CamineroNo ratings yet
- Elements Cmpds Mix Ws-AnswersDocument2 pagesElements Cmpds Mix Ws-Answerseric sivaneshNo ratings yet
- Manas Arora 3 Year - B Roll No. 3 Vastu Kala AcademyDocument12 pagesManas Arora 3 Year - B Roll No. 3 Vastu Kala AcademyManasAroraNo ratings yet
- 21st Century Skills PaperDocument8 pages21st Century Skills PaperemilyraleyNo ratings yet
- The Spirit of Jugaad / Bricolage For Enhanced Corporate EntrepreneurshipDocument20 pagesThe Spirit of Jugaad / Bricolage For Enhanced Corporate EntrepreneurshippanditpreachesNo ratings yet
- Module 5 in Eed 114: ReviewDocument6 pagesModule 5 in Eed 114: ReviewYvi BenrayNo ratings yet
- Free - Space W - Band Setup For The Electrical Characterization of Materials and MM - Wave ComponentsDocument44 pagesFree - Space W - Band Setup For The Electrical Characterization of Materials and MM - Wave ComponentsthomasNo ratings yet
- The Relationship Between Dimensions of Love, Personality, and Relationship LengthDocument11 pagesThe Relationship Between Dimensions of Love, Personality, and Relationship LengthjuaromerNo ratings yet
- Cloud FrameworkDocument6 pagesCloud FrameworkloversatriskNo ratings yet
- Allen Bradley 160 C SeriesDocument28 pagesAllen Bradley 160 C SeriesTihomir Matulić100% (1)
- Thermicam: The World'S First Integrated Thermal Traffic SensorDocument2 pagesThermicam: The World'S First Integrated Thermal Traffic SensorSudipta BhadraNo ratings yet
- Zen and The ArtDocument3 pagesZen and The ArtMaria GonzálezNo ratings yet
- Staff Data Format-AUCDocument1 pageStaff Data Format-AUCSenthil KumarNo ratings yet
- Delayed Hospital Discharges of Older Patients A Systematic Review On Prevalence and CostsDocument12 pagesDelayed Hospital Discharges of Older Patients A Systematic Review On Prevalence and CostsGabriela ObonNo ratings yet
- 03 Molar Volume of A Gas Long ReportDocument5 pages03 Molar Volume of A Gas Long ReportHoomehr TayariyanNo ratings yet
- 1st Quarter ToolkitDocument6 pages1st Quarter ToolkitDimple BolotaoloNo ratings yet
- WINPROPDocument296 pagesWINPROPEfrain Ramirez Chavez100% (2)
- Problem PipingDocument79 pagesProblem PipingSiddhi MhatreNo ratings yet
- 900FH&1000FH TurbinesDocument12 pages900FH&1000FH TurbinesRyanNo ratings yet
- SAP Kernel 720Document24 pagesSAP Kernel 720rajaraobhmNo ratings yet
- 4 Quarter Performance Task in Statistics and ProbabilityDocument5 pages4 Quarter Performance Task in Statistics and ProbabilitySHS Panaguiton Emma Marimel HUMSS12-ANo ratings yet
- Flood Precast - Super Wideslab Load Span TablesDocument1 pageFlood Precast - Super Wideslab Load Span TablesRaymond KinnairdNo ratings yet




































































































Download as pdf or txt
You might also like
- Intro To Plastic Injection Molding EbookDocument43 pagesIntro To Plastic Injection Molding EbookJames Farrugia78% (9)
- 1976 McCormick. Computability of Global Solutions To Factorable Nonconvex Programs Part I - Convex Underestimating Problems PDFDocument29 pages1976 McCormick. Computability of Global Solutions To Factorable Nonconvex Programs Part I - Convex Underestimating Problems PDFDimitrisSotiropoulosNo ratings yet
- Mirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationDocument9 pagesMirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationfurbyhaterNo ratings yet
- Duke XC SL Race ServiceDocument10 pagesDuke XC SL Race ServicesilverapeNo ratings yet
- Fixed-Point Iteration Based Algorithm For A ClassDocument13 pagesFixed-Point Iteration Based Algorithm For A ClassNick MantzakourasNo ratings yet
- On Interior-Point Methods, Related Dynamical Systems Results and Cores of Targets For Linear ProgrammingDocument11 pagesOn Interior-Point Methods, Related Dynamical Systems Results and Cores of Targets For Linear ProgramminginventionjournalsNo ratings yet
- Global Convergence of Trust-Region Algorithms For Convex Constrained Minimization Without DerivativesDocument7 pagesGlobal Convergence of Trust-Region Algorithms For Convex Constrained Minimization Without DerivativesEmerson ButynNo ratings yet
- LipsolDocument26 pagesLipsolCmpt CmptNo ratings yet
- Conjugate Gradient MethodDocument8 pagesConjugate Gradient MethodDavid HumeNo ratings yet
- A new trust region method for unconstrained optimization: 夡 Zhen-Jun Shi, Jin-Hua GuoDocument12 pagesA new trust region method for unconstrained optimization: 夡 Zhen-Jun Shi, Jin-Hua GuoElham AtlassiNo ratings yet
- Global Convergence of A Trust-Region Sqp-Filter Algorithm For General Nonlinear ProgrammingDocument25 pagesGlobal Convergence of A Trust-Region Sqp-Filter Algorithm For General Nonlinear ProgrammingAndressa PereiraNo ratings yet
- Course Notes: Week 2.: Math 270C: Applied Numerical Linear AlgebraDocument8 pagesCourse Notes: Week 2.: Math 270C: Applied Numerical Linear AlgebraShwetabh SrivastavaNo ratings yet
- Goldfarb IdnaniDocument33 pagesGoldfarb Idnanifzhang756115100% (1)
- Gradient Methods For Minimizing Composite Objective FunctionDocument31 pagesGradient Methods For Minimizing Composite Objective Functionegv2000No ratings yet
- Mechanical Engineering Program COPPE / Federal University of Rio de Janeiro Caixa Postal 68503, 21945-970 Rio de Janeiro, BRAZILDocument46 pagesMechanical Engineering Program COPPE / Federal University of Rio de Janeiro Caixa Postal 68503, 21945-970 Rio de Janeiro, BRAZILEdward Quijada OrellanaNo ratings yet
- Steepest DescentDocument7 pagesSteepest DescentstankccNo ratings yet
- Quadratic ProgrammingDocument19 pagesQuadratic Programmingjabir sulaimanNo ratings yet
- Interactive Water SurfacesDocument10 pagesInteractive Water SurfacesWu XianchunNo ratings yet
- Improved Approximation Algorithms For The Vertex Cover Problem in Graphs and HypergraphsDocument16 pagesImproved Approximation Algorithms For The Vertex Cover Problem in Graphs and HypergraphsRitika JohriNo ratings yet
- Nonlinear Programming Based Sliding Mode Control of An Inverted PendulumDocument5 pagesNonlinear Programming Based Sliding Mode Control of An Inverted Pendulumvirus101No ratings yet
- Local Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXDocument9 pagesLocal Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXhellothapliyalNo ratings yet
- An Algorithm For Quadratic Optimization With One Quadratic Constraint and Bounds On The VariablesDocument9 pagesAn Algorithm For Quadratic Optimization With One Quadratic Constraint and Bounds On The Variablesgijs fehmersNo ratings yet
- Lecture 16: Linear Algebra III: cs412: Introduction To Numerical AnalysisDocument7 pagesLecture 16: Linear Algebra III: cs412: Introduction To Numerical AnalysisZachary MarionNo ratings yet
- Lattice Basis Reduction Improved Practical AlgoritDocument28 pagesLattice Basis Reduction Improved Practical AlgoritSidou SissahNo ratings yet
- W9a Autoencoders PcaDocument7 pagesW9a Autoencoders PcazeliawillscumbergNo ratings yet
- An Algorithm For The Computation of EigenvaluesDocument44 pagesAn Algorithm For The Computation of Eigenvalues孔翔鸿No ratings yet
- An Analytical Method For Linear Elliptic Pdes and Its Numerical ImplementationDocument19 pagesAn Analytical Method For Linear Elliptic Pdes and Its Numerical Implementationlilasaid2010No ratings yet
- Steven L. Mielke Et Al - Extrapolation and Perturbation Schemes For Accelerating The Convergence of Quantum Mechanical Free Energy Calculations Via The Fourier Path-Integral Monte Carlo MethodDocument25 pagesSteven L. Mielke Et Al - Extrapolation and Perturbation Schemes For Accelerating The Convergence of Quantum Mechanical Free Energy Calculations Via The Fourier Path-Integral Monte Carlo MethodWippetsxzNo ratings yet
- Nonlinear Estimation For Linear Inverse Problems With Error in The OperatorDocument27 pagesNonlinear Estimation For Linear Inverse Problems With Error in The OperatorSamina TabassumNo ratings yet
- BPMPD ManualDocument30 pagesBPMPD ManualMarcelo DávalosNo ratings yet
- COMSOL Conf CardiffDocument8 pagesCOMSOL Conf CardiffLexin LiNo ratings yet
- Multigrid Algorithms For Inverse Problems With Linear Parabolic Pde ConstraintsDocument29 pagesMultigrid Algorithms For Inverse Problems With Linear Parabolic Pde Constraintsapi-19973331No ratings yet
- Raptis2019 N QueensDocument16 pagesRaptis2019 N Queensraptis.theophanesNo ratings yet
- Quantum Algorithms For Matchings and Vertex-Colorings in GraphsDocument18 pagesQuantum Algorithms For Matchings and Vertex-Colorings in GraphsSivaRamaKrishnan R.No ratings yet
- Galerkin's Method G U L : Computation Methods For NanoengineeringDocument16 pagesGalerkin's Method G U L : Computation Methods For NanoengineeringmahmoudNo ratings yet
- State RegulatorDocument23 pagesState RegulatorRishi Kant SharmaNo ratings yet
- Gauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelDocument18 pagesGauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelcegarciaNo ratings yet
- Research PaperDocument10 pagesResearch PaperAaron StewartNo ratings yet
- A New Index Calculus Algorithm With Complexity L (1/4 + o (1) ) in Small CharacteristicDocument23 pagesA New Index Calculus Algorithm With Complexity L (1/4 + o (1) ) in Small Characteristicawais04No ratings yet
- NeurIPS 2020 Debiasing Distributed Second Order Optimization With Surrogate Sketching and Scaled Regularization PaperDocument12 pagesNeurIPS 2020 Debiasing Distributed Second Order Optimization With Surrogate Sketching and Scaled Regularization PaperRichard CorneliusNo ratings yet
- A Model-Trust Region Algorithm Utilizing A Quadratic InterpolantDocument11 pagesA Model-Trust Region Algorithm Utilizing A Quadratic InterpolantCândida MeloNo ratings yet
- Numerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodDocument17 pagesNumerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodMárcioBarbozaNo ratings yet
- NLPQLG: A Fortran Implementation of A Sequential Quadratic Programming Algorithm For Heuristic Global Optimization - User's GuideDocument24 pagesNLPQLG: A Fortran Implementation of A Sequential Quadratic Programming Algorithm For Heuristic Global Optimization - User's GuiderudsbrNo ratings yet
- An Adaptive Nonlinear Least-Squares AlgorithmDocument21 pagesAn Adaptive Nonlinear Least-Squares AlgorithmOleg ShirokobrodNo ratings yet
- Statistical Mechanics Lecture Notes (2006), L13Document7 pagesStatistical Mechanics Lecture Notes (2006), L13OmegaUserNo ratings yet
- Neural Nets For OptimizationDocument34 pagesNeural Nets For OptimizationNikolaos MastorakisNo ratings yet
- Molecular Modelling: Lecture 2: Geometry Optimization and Brief Repetition of Statistical ThermodynamicsDocument9 pagesMolecular Modelling: Lecture 2: Geometry Optimization and Brief Repetition of Statistical ThermodynamicsDushyant PatelNo ratings yet
- Algorithms For Bound Constrained Quadratic Programming ProblemsDocument24 pagesAlgorithms For Bound Constrained Quadratic Programming ProblemsasdfNo ratings yet
- 1999 GuntmanDocument29 pages1999 GuntmanFelipeCarraroNo ratings yet
- Algebraic Methods To Compute Mathieu Functions - FrenkelDocument11 pagesAlgebraic Methods To Compute Mathieu Functions - FrenkelJ Jesús Villanueva GarcíaNo ratings yet
- Improved Conic Reformulations For K-Means Clustering: Madhushini Narayana Prasad and Grani A. HanasusantoDocument24 pagesImproved Conic Reformulations For K-Means Clustering: Madhushini Narayana Prasad and Grani A. HanasusantoNo12n533No ratings yet
- Survey of Trust-Region Derivative Free Optimization MethodsDocument12 pagesSurvey of Trust-Region Derivative Free Optimization MethodsMariangela PintoNo ratings yet
- Current Trends in Numerical Linear AlgebraDocument19 pagesCurrent Trends in Numerical Linear Algebramanasdutta3495No ratings yet
- Numerical Experiments With Variations of The Gauss-Newton Algorithm For Nonlinear Least SquaresDocument17 pagesNumerical Experiments With Variations of The Gauss-Newton Algorithm For Nonlinear Least SquaresMárcioBarbozaNo ratings yet
- (David Pisinger) Where Are The Hard Knapsack ProblemsDocument14 pages(David Pisinger) Where Are The Hard Knapsack Problemswalrod22No ratings yet
- EditorialDocument12 pagesEditorialSara ArracheraNo ratings yet
- Hierarchical Matrices and Adaptive CrossDocument10 pagesHierarchical Matrices and Adaptive CrossChee Zhen QiNo ratings yet
- Time Harmonic Maxwell EqDocument16 pagesTime Harmonic Maxwell Eqawais4125No ratings yet
- Math OptimizationDocument11 pagesMath OptimizationAlexander ValverdeNo ratings yet
- Algorithms For Constrained OptimizationDocument22 pagesAlgorithms For Constrained OptimizationnmooseNo ratings yet
- School of Computer Science and Applied MathematicsDocument8 pagesSchool of Computer Science and Applied MathematicsFanta CamaraNo ratings yet
- Siam J. S - C - 1998 Society For Industrial and Applied Mathematics Vol. 19, No. 2, Pp. 364-386, March 1998 003Document23 pagesSiam J. S - C - 1998 Society For Industrial and Applied Mathematics Vol. 19, No. 2, Pp. 364-386, March 1998 003Sidney LinsNo ratings yet
- 08 - Reliability Databases State of ArtDocument38 pages08 - Reliability Databases State of ArtSidney Lins100% (4)
- ASME Sección VIII D1 Non Mandatory Appendices EDocument1 pageASME Sección VIII D1 Non Mandatory Appendices ESidney LinsNo ratings yet
- Asme Sec I A2001Document4 pagesAsme Sec I A2001Sidney LinsNo ratings yet
- Minitab - Quality ControlDocument310 pagesMinitab - Quality ControlRajesh Sharma100% (4)
- Multiobjective Genetic Algorithms Applied To Solve Optimization ProblemsDocument4 pagesMultiobjective Genetic Algorithms Applied To Solve Optimization ProblemsSidney LinsNo ratings yet
- 06 Process ReliabilityDocument12 pages06 Process ReliabilitySidney LinsNo ratings yet
- 04 Reliability DefinitionsDocument3 pages04 Reliability DefinitionsSidney LinsNo ratings yet
- Duality Theory: Berc RustemDocument29 pagesDuality Theory: Berc RustemSidney LinsNo ratings yet
- Motor Torque and Power: J. Michael MccarthyDocument7 pagesMotor Torque and Power: J. Michael MccarthySidney LinsNo ratings yet
- Arnold V I - Mathematical Methods of Classical MechanicsDocument536 pagesArnold V I - Mathematical Methods of Classical MechanicsSidney LinsNo ratings yet
- A First Lab in Circuits and Electronics by YannisDocument139 pagesA First Lab in Circuits and Electronics by YannisSasukeNo ratings yet
- Bank Management System Source CodeDocument5 pagesBank Management System Source CodetheblueartboxNo ratings yet
- CHE 110A Problem Set No. 2: Smith, Van Ness, Abbott, 2.3, Page 56Document2 pagesCHE 110A Problem Set No. 2: Smith, Van Ness, Abbott, 2.3, Page 56Karthika SNo ratings yet
- 3126E Engine: Electrical Circuit DiagramDocument10 pages3126E Engine: Electrical Circuit DiagramPhil B.No ratings yet
- ISA RP3.2-1960 Flange Mounted Sharp Edged Orifice Plate For Flow Measurement PDFDocument8 pagesISA RP3.2-1960 Flange Mounted Sharp Edged Orifice Plate For Flow Measurement PDFamshahNo ratings yet
- Ultra Dense NetworkDocument27 pagesUltra Dense NetworkYounesNo ratings yet
- Client Name: Well, Max Birthdate: AGE: 7 Years, 8 Months School: Grade: 1 Dates of Assessment: July, 2011 Date of Report: Assessed By: FlamesDocument10 pagesClient Name: Well, Max Birthdate: AGE: 7 Years, 8 Months School: Grade: 1 Dates of Assessment: July, 2011 Date of Report: Assessed By: Flamesapi-160674927No ratings yet
- Model Course 1.07 PDFDocument75 pagesModel Course 1.07 PDFShiena CamineroNo ratings yet
- Elements Cmpds Mix Ws-AnswersDocument2 pagesElements Cmpds Mix Ws-Answerseric sivaneshNo ratings yet
- Manas Arora 3 Year - B Roll No. 3 Vastu Kala AcademyDocument12 pagesManas Arora 3 Year - B Roll No. 3 Vastu Kala AcademyManasAroraNo ratings yet
- 21st Century Skills PaperDocument8 pages21st Century Skills PaperemilyraleyNo ratings yet
- The Spirit of Jugaad / Bricolage For Enhanced Corporate EntrepreneurshipDocument20 pagesThe Spirit of Jugaad / Bricolage For Enhanced Corporate EntrepreneurshippanditpreachesNo ratings yet
- Module 5 in Eed 114: ReviewDocument6 pagesModule 5 in Eed 114: ReviewYvi BenrayNo ratings yet
- Free - Space W - Band Setup For The Electrical Characterization of Materials and MM - Wave ComponentsDocument44 pagesFree - Space W - Band Setup For The Electrical Characterization of Materials and MM - Wave ComponentsthomasNo ratings yet
- The Relationship Between Dimensions of Love, Personality, and Relationship LengthDocument11 pagesThe Relationship Between Dimensions of Love, Personality, and Relationship LengthjuaromerNo ratings yet
- Cloud FrameworkDocument6 pagesCloud FrameworkloversatriskNo ratings yet
- Allen Bradley 160 C SeriesDocument28 pagesAllen Bradley 160 C SeriesTihomir Matulić100% (1)
- Thermicam: The World'S First Integrated Thermal Traffic SensorDocument2 pagesThermicam: The World'S First Integrated Thermal Traffic SensorSudipta BhadraNo ratings yet
- Zen and The ArtDocument3 pagesZen and The ArtMaria GonzálezNo ratings yet
- Staff Data Format-AUCDocument1 pageStaff Data Format-AUCSenthil KumarNo ratings yet
- Delayed Hospital Discharges of Older Patients A Systematic Review On Prevalence and CostsDocument12 pagesDelayed Hospital Discharges of Older Patients A Systematic Review On Prevalence and CostsGabriela ObonNo ratings yet
- 03 Molar Volume of A Gas Long ReportDocument5 pages03 Molar Volume of A Gas Long ReportHoomehr TayariyanNo ratings yet
- 1st Quarter ToolkitDocument6 pages1st Quarter ToolkitDimple BolotaoloNo ratings yet
- WINPROPDocument296 pagesWINPROPEfrain Ramirez Chavez100% (2)
- Problem PipingDocument79 pagesProblem PipingSiddhi MhatreNo ratings yet
- 900FH&1000FH TurbinesDocument12 pages900FH&1000FH TurbinesRyanNo ratings yet
- SAP Kernel 720Document24 pagesSAP Kernel 720rajaraobhmNo ratings yet
- 4 Quarter Performance Task in Statistics and ProbabilityDocument5 pages4 Quarter Performance Task in Statistics and ProbabilitySHS Panaguiton Emma Marimel HUMSS12-ANo ratings yet
- Flood Precast - Super Wideslab Load Span TablesDocument1 pageFlood Precast - Super Wideslab Load Span TablesRaymond KinnairdNo ratings yet