Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Topic 1.2 FormativeDocument3 pagesTopic 1.2 FormativeHamza Farhan ShaikhNo ratings yet
- English For Academic and Professional Purposes: Quarter 1 - Module 3: Summarizing Academic TextsDocument25 pagesEnglish For Academic and Professional Purposes: Quarter 1 - Module 3: Summarizing Academic TextsCharles Lacuna100% (9)
- Deploying Enterprise SIP Trunks With CUBE, CUCM and MediaSense SBC PDFDocument96 pagesDeploying Enterprise SIP Trunks With CUBE, CUCM and MediaSense SBC PDFZeeshan DawoodaniNo ratings yet
- State of Old MataramDocument40 pagesState of Old MataramIwan SuryolaksonoNo ratings yet
- Tentang KometDocument1 pageTentang KometIwan SuryolaksonoNo ratings yet
- The Queen of ShebaDocument6 pagesThe Queen of ShebaIwan SuryolaksonoNo ratings yet
- Merek RefrigeratorDocument1 pageMerek RefrigeratorIwan SuryolaksonoNo ratings yet
- Seminar Abdul Qadir BedilDocument3 pagesSeminar Abdul Qadir BedilIwan Suryolaksono100% (1)
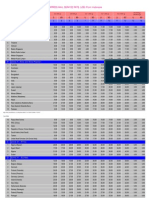
- Express Mail Service Rate (Us$) From Indonesia: No Country of DestinationDocument4 pagesExpress Mail Service Rate (Us$) From Indonesia: No Country of DestinationIwan SuryolaksonoNo ratings yet
- Harga Emas Di IndonesiaDocument1 pageHarga Emas Di IndonesiaIwan SuryolaksonoNo ratings yet
- Notes On Accounting of Insurance CompanyDocument6 pagesNotes On Accounting of Insurance Companysneha pathakNo ratings yet
- 05 - To Determine The Concentration of Hydrogen Peroxide in A Solution Using A Back TitrationDocument2 pages05 - To Determine The Concentration of Hydrogen Peroxide in A Solution Using A Back TitrationBeyonce NoelNo ratings yet
- Recipes From The Epicurious Cookbook by Tanya Steel and The Editors of EpicuriousDocument11 pagesRecipes From The Epicurious Cookbook by Tanya Steel and The Editors of EpicuriousThe Recipe ClubNo ratings yet
- Agenda - 4th National Dialogue For Food SecurityDocument6 pagesAgenda - 4th National Dialogue For Food SecurityMOHammed DakhanNo ratings yet
- Tajuk Eksperimen Ebb 325 0809Document1 pageTajuk Eksperimen Ebb 325 0809fred5181No ratings yet
- Bhutiani2016 Article AssessmentOfGangaRiverEcosyste PDFDocument7 pagesBhutiani2016 Article AssessmentOfGangaRiverEcosyste PDFDipakNo ratings yet
- Crash 2024 04 20 11 43 32 508Document13 pagesCrash 2024 04 20 11 43 32 508doodyman420No ratings yet
- PACSA 2012 Invitation Program RegFormDocument6 pagesPACSA 2012 Invitation Program RegFormCherie DyNo ratings yet
- Radiation Measurements: Zhipeng Wang, Shuming Xing, Kun Wang, Sunjun Jin, Jian Zhang, Fuyou FanDocument7 pagesRadiation Measurements: Zhipeng Wang, Shuming Xing, Kun Wang, Sunjun Jin, Jian Zhang, Fuyou FanÖzgür Kara (OncoHealth)No ratings yet
- EncyclopediaDocument590 pagesEncyclopediaSantiago RojasNo ratings yet
- RC - DS - Iscom S5600-Ei-20201112Document9 pagesRC - DS - Iscom S5600-Ei-20201112qwertyNo ratings yet
- Iaqvec2023 511Document17 pagesIaqvec2023 511M. Iqbal, S.T., M.Sc M. Iqbal, S.T., M.ScNo ratings yet
- The Use of Articles With Geographical NamesDocument1 pageThe Use of Articles With Geographical NamesOkjdscgvhNo ratings yet
- Wood Manufacturing (NO GIF)Document47 pagesWood Manufacturing (NO GIF)Sebastian OcampoNo ratings yet
- Managing Interdependence: Social Responsibility and EthicsDocument21 pagesManaging Interdependence: Social Responsibility and EthicsSalman MohiuddinNo ratings yet
- Applecare Fees Hagens BermanDocument164 pagesApplecare Fees Hagens BermanpcwhalenNo ratings yet
- Sasmo 2020 G8Document16 pagesSasmo 2020 G8Məhəmməd CəbrayıllıNo ratings yet
- The Efficient Strategies of Mcdonald'sDocument4 pagesThe Efficient Strategies of Mcdonald'sTabinda Shabbir KhanNo ratings yet
- West Africa Gas Pipeline - Benin EIADocument677 pagesWest Africa Gas Pipeline - Benin EIABdaejo RahmonNo ratings yet
- Arch Linux: A Simple, Lightweight Distribution For 32-Bit CpusDocument3 pagesArch Linux: A Simple, Lightweight Distribution For 32-Bit CpusManuel ReyNo ratings yet
- Socio CulturalDocument12 pagesSocio CulturalVikas SharmaNo ratings yet
- TRIP Moving South Carolina Forward Report September 2021Document21 pagesTRIP Moving South Carolina Forward Report September 2021WMBF NewsNo ratings yet
- REFLECTION in BioDocument1 pageREFLECTION in BiopauletteNo ratings yet
- Chapter 2 Form 3 Igcse-1Document31 pagesChapter 2 Form 3 Igcse-1Victor OkosunNo ratings yet
- Experimental Study On Strength and Durability Characteristics of Concrete With Partial Replacement of Nano-Silica, Nano-Vanadium MixtureDocument4 pagesExperimental Study On Strength and Durability Characteristics of Concrete With Partial Replacement of Nano-Silica, Nano-Vanadium MixtureInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Reclaim Feeders BrochureDocument8 pagesReclaim Feeders Brochureelsieazcuna024No ratings yet
- Alufo Shutter ApplicationsDocument6 pagesAlufo Shutter ApplicationssmijusNo ratings yet