Download as pdf or txt
You might also like
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Materials: Prediction of Tool Wear Using Artificial Neural Networks During Turning of Hardened SteelDocument15 pagesMaterials: Prediction of Tool Wear Using Artificial Neural Networks During Turning of Hardened Steelrub786No ratings yet
- Published: April 2020 Author:: Yuan Guo, Yu Sun and Kai WuDocument15 pagesPublished: April 2020 Author:: Yuan Guo, Yu Sun and Kai WuShankar KNo ratings yet
- Application of Backpropagation Neural Network For Spindle Vibration-Based Tool Wear Monitoring in Micro-MillingDocument9 pagesApplication of Backpropagation Neural Network For Spindle Vibration-Based Tool Wear Monitoring in Micro-MillingkhusseinNo ratings yet
- Development of An Intelligent System For Tool Wear Monitoring Applying Neural NetworksDocument6 pagesDevelopment of An Intelligent System For Tool Wear Monitoring Applying Neural Networkshari0118No ratings yet
- How To Evaluate BoatsDocument14 pagesHow To Evaluate BoatsJuniorJavier Olivo FarreraNo ratings yet
- Ijdmt: ©iaemeDocument13 pagesIjdmt: ©iaemeIAEME PublicationNo ratings yet
- An Expert System For Fault Diagnosis in Internal Combustion Engines Using Probability Neural NetworkDocument2 pagesAn Expert System For Fault Diagnosis in Internal Combustion Engines Using Probability Neural Networksriblue7No ratings yet
- Yuanzhi Huang@ucd IeDocument22 pagesYuanzhi Huang@ucd Iehideki hidekiNo ratings yet
- Analysis of Permanent Magnet Synchronous MotorDocument15 pagesAnalysis of Permanent Magnet Synchronous Motormalini72No ratings yet
- Design of A Real-Time Spindle Health Monitoring and Diagnosis SystemDocument4 pagesDesign of A Real-Time Spindle Health Monitoring and Diagnosis SystemVintilescu AlinaNo ratings yet
- Symbolic Time Series Analysis of UltrasoDocument19 pagesSymbolic Time Series Analysis of UltrasoCedeps facensNo ratings yet
- Automatic Fault Diagnosis of Internal Combustion eDocument8 pagesAutomatic Fault Diagnosis of Internal Combustion eznadeem2No ratings yet
- Continuous Vibration Monitoring System Using Gaussian Beams and Artificial Neural NetworkDocument8 pagesContinuous Vibration Monitoring System Using Gaussian Beams and Artificial Neural NetworkAbigor45No ratings yet
- Senzori U Cncu ENGDocument4 pagesSenzori U Cncu ENGToni MišićNo ratings yet
- On-Line Cutting Tool Condition Monitoring in Machining Processes Using Artificial IntelligenceDocument24 pagesOn-Line Cutting Tool Condition Monitoring in Machining Processes Using Artificial IntelligenceSelva GanapathyNo ratings yet
- Bearing DefectsDocument13 pagesBearing Defectsjoshibec100% (1)
- 1 s2.0 S0007850610001976 MainDocument23 pages1 s2.0 S0007850610001976 MainM Vamshi KrrishnaNo ratings yet
- Стаття ENG МельничукDocument3 pagesСтаття ENG МельничукБогдан МельничукNo ratings yet
- Bayesian Network Approach To Root Cause DiagnosisDocument17 pagesBayesian Network Approach To Root Cause DiagnosisDhinesh GanesanNo ratings yet
- A Neuro-Fuzzy Approach To Gear System Monitoring: Wilson Wang, Fathy Ismail, and Farid GolnaraghiDocument14 pagesA Neuro-Fuzzy Approach To Gear System Monitoring: Wilson Wang, Fathy Ismail, and Farid GolnaraghiPradeep KunduNo ratings yet
- 1 s2.0 S1350630722004897 MainDocument15 pages1 s2.0 S1350630722004897 MainCristian BastiasNo ratings yet
- Design of Multisensor Fusion-Based Tool Condition Monitoring System in End MillingDocument14 pagesDesign of Multisensor Fusion-Based Tool Condition Monitoring System in End Millinguamiranda3518No ratings yet
- Transmission Line Signature AnalysisDocument6 pagesTransmission Line Signature AnalysisLalit KumarNo ratings yet
- Intelligent Tool Condition Monitoring in Milling OperationDocument10 pagesIntelligent Tool Condition Monitoring in Milling OperationKavin PrakashNo ratings yet
- Condition Monitoring of Low Speed Bearings PDFDocument10 pagesCondition Monitoring of Low Speed Bearings PDFluciano GarciaNo ratings yet
- Vibration Analysis of Four Stroke Petrol EngineDocument15 pagesVibration Analysis of Four Stroke Petrol EnginePriyam Srivastav100% (1)
- Thesis Condition MonitoringDocument9 pagesThesis Condition Monitoringraquellivingstonakron100% (2)
- Research Projects - Dr. B.R. UpadhyayaDocument3 pagesResearch Projects - Dr. B.R. UpadhyayaprabuNo ratings yet
- Material RemovalDocument10 pagesMaterial RemovalIAEME PublicationNo ratings yet
- Integration of Artificial Intelligence Systems For Nuclear Power Plant Surveillance and DiagnosticsDocument9 pagesIntegration of Artificial Intelligence Systems For Nuclear Power Plant Surveillance and DiagnosticsskmrsanjeevNo ratings yet
- Application of Neuro-Fuzzy Techniques in Oil Pipeline Ultrasonic Nondestructive TestingDocument11 pagesApplication of Neuro-Fuzzy Techniques in Oil Pipeline Ultrasonic Nondestructive TestingNordin SuhadatNo ratings yet
- An Overview of Data Acquisition System For Cutting Force Measuring and Optimization in MillingDocument8 pagesAn Overview of Data Acquisition System For Cutting Force Measuring and Optimization in MillingM Vamshi KrrishnaNo ratings yet
- Data Driven Smart Manufacturing Tool Wear Monitoring With Audio Signals and Machine LearningDocument11 pagesData Driven Smart Manufacturing Tool Wear Monitoring With Audio Signals and Machine LearningSuzanaPetrovicNo ratings yet
- Classification of Ball Bearing Faults Using Vibro Acoustic Sensor Data FusionDocument9 pagesClassification of Ball Bearing Faults Using Vibro Acoustic Sensor Data FusionHanifNo ratings yet
- Machine Condition Monitoring Project Final ReportDocument11 pagesMachine Condition Monitoring Project Final ReportSivasidharth EzhilNo ratings yet
- J Matpr 2017 12 100Document9 pagesJ Matpr 2017 12 100captain americaNo ratings yet
- Sensorcomm 2011 12 40 10257 PDFDocument5 pagesSensorcomm 2011 12 40 10257 PDFBee MUNo ratings yet
- Fault Diagnosis in Analog Electronic Circuits - THDocument16 pagesFault Diagnosis in Analog Electronic Circuits - THBorut ViNo ratings yet
- Modal Based Damage Detection Using ANNDocument8 pagesModal Based Damage Detection Using ANNSri NNo ratings yet
- Development of A Measuring Sensory System Based OnDocument10 pagesDevelopment of A Measuring Sensory System Based OnNathanael Basana HisarNo ratings yet
- PolymerDocument10 pagesPolymerivorisekNo ratings yet
- J Ymssp 2013 01 015Document16 pagesJ Ymssp 2013 01 015FioriAmeliaHathawayNo ratings yet
- Semeq PDFDocument19 pagesSemeq PDFluccadecarvalhoNo ratings yet
- A Virtual Sensor For Online Fault Detection of Multitooth ToolsDocument24 pagesA Virtual Sensor For Online Fault Detection of Multitooth ToolsLibotNo ratings yet
- 1 03 16Document11 pages1 03 16Marciel AmorimNo ratings yet
- PHD Thesis On Condition Monitoring of Induction MotorDocument5 pagesPHD Thesis On Condition Monitoring of Induction Motorjackiehintonwashington100% (2)
- Evaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyDocument6 pagesEvaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyLeo ArguijoNo ratings yet
- Recent Developments Induction Motor Drives Fault Diagnosis Using AI TechniquesDocument8 pagesRecent Developments Induction Motor Drives Fault Diagnosis Using AI Techniquesfahim47No ratings yet
- Improved Condition Monitoring System For InductionDocument7 pagesImproved Condition Monitoring System For InductionFidya Eka PrahestiNo ratings yet
- Structural Health Monitoring Using Neural Network Based Vibrational System IdentificationDocument4 pagesStructural Health Monitoring Using Neural Network Based Vibrational System IdentificationManmatha KrishnanNo ratings yet
- Applsci 08 01584Document14 pagesApplsci 08 01584Akash SavaliyaNo ratings yet
- Real-Time Seam Penetration Identification in Arc Welding Based On Fusion of Sound, Voltage and Spectrum SignalsDocument12 pagesReal-Time Seam Penetration Identification in Arc Welding Based On Fusion of Sound, Voltage and Spectrum Signalsgino andradeNo ratings yet
- HTTPWWW Jamris Org042009saveas Phpquestjamrisno042009p172-174Document3 pagesHTTPWWW Jamris Org042009saveas Phpquestjamrisno042009p172-174JavierVeraNo ratings yet
- Preprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningDocument13 pagesPreprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningCesar Vargas ArayaNo ratings yet
- Monitoring The Parameters of The Electronics Devices To Assure The Predictive Maintenance of Equipment.Document4 pagesMonitoring The Parameters of The Electronics Devices To Assure The Predictive Maintenance of Equipment.Andres SanchezNo ratings yet
- Signal Processing of Sensor Node Data For Vehicle DetectionDocument6 pagesSignal Processing of Sensor Node Data For Vehicle Detectionjamal ahmedNo ratings yet
- MEMS Accelerometers: Testing and Practical Approach For Smart Sensing and Machinery DiagnosticsDocument23 pagesMEMS Accelerometers: Testing and Practical Approach For Smart Sensing and Machinery DiagnosticsRafael Lemanski Dos SantosNo ratings yet
- Ee017 10Document7 pagesEe017 10Lucky DewanganNo ratings yet
- BasicsDocument20 pagesBasicsMradul YadavNo ratings yet
- Chapter 10 One Sample Tests of HypothesisDocument36 pagesChapter 10 One Sample Tests of HypothesisMradul YadavNo ratings yet
- Previous YearsDocument87 pagesPrevious YearsMradul YadavNo ratings yet
- Awards & Honours: in The CountryDocument13 pagesAwards & Honours: in The CountryMradul YadavNo ratings yet
- October'17 SnippetDocument8 pagesOctober'17 SnippetMradul YadavNo ratings yet
- Handout - How To Analyze A CaseDocument8 pagesHandout - How To Analyze A CaseMradul YadavNo ratings yet
- Countries, Capitals, Currencies, Prez/PM: Country Capital Currency Prez/Prime Minister AsiaDocument7 pagesCountries, Capitals, Currencies, Prez/PM: Country Capital Currency Prez/Prime Minister AsiaMradul YadavNo ratings yet
- Book 1 BDocument3 pagesBook 1 BMradul YadavNo ratings yet
- How Much Meat?: Food Safety DivisionDocument2 pagesHow Much Meat?: Food Safety DivisionMradul YadavNo ratings yet
- Verbal Ability - Online Practice Test 23Document3 pagesVerbal Ability - Online Practice Test 23Mradul YadavNo ratings yet
- Philippine Air Force CAS Aircraft Bidding DocumentsDocument151 pagesPhilippine Air Force CAS Aircraft Bidding DocumentsfuccioniNo ratings yet
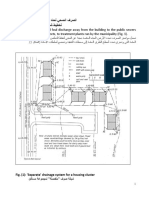
- Drainage Below GroundDocument5 pagesDrainage Below GroundmisharyNo ratings yet
- B94-6 R1995 E1984Document21 pagesB94-6 R1995 E1984zojoNo ratings yet
- Kisi-Kisi BHS Inggris-Soal Pas Kelas 8 K13Document6 pagesKisi-Kisi BHS Inggris-Soal Pas Kelas 8 K13Joko PrayitnoNo ratings yet
- PR m1Document15 pagesPR m1Jazmyn BulusanNo ratings yet
- Club Sport DatabaseDocument211 pagesClub Sport DatabaseIlankumaran kNo ratings yet
- Chemical Fume Hood HandbookDocument11 pagesChemical Fume Hood Handbookkumar123rajuNo ratings yet
- AKAR - Gearless Permanent Magnet Synchronous MotorDocument22 pagesAKAR - Gearless Permanent Magnet Synchronous MotordepolisdooNo ratings yet
- Setting GuideDocument12 pagesSetting GuideJamesNo ratings yet
- Chapter 1.2 Types of Organisation (Notes)Document5 pagesChapter 1.2 Types of Organisation (Notes)S RameshNo ratings yet
- The Body Productive Rethinking Capitalism Work and The Body Steffan Blayney Full ChapterDocument67 pagesThe Body Productive Rethinking Capitalism Work and The Body Steffan Blayney Full Chaptersharon.tuttle380100% (6)
- EC Physical Sciences Grade 11 November 2022 P1 and MemoDocument25 pagesEC Physical Sciences Grade 11 November 2022 P1 and MemokhulntandoNo ratings yet
- Power Electronics: Thyristor Controlled Power For Electric MotorsDocument10 pagesPower Electronics: Thyristor Controlled Power For Electric Motorsshahab moinNo ratings yet
- Remarks:: Republic of The Philippines City of General SantosDocument1 pageRemarks:: Republic of The Philippines City of General SantosThe MatrixNo ratings yet
- UpsDocument31 pagesUpsThuyaNo ratings yet
- REVISING EXERCISES 1baDocument3 pagesREVISING EXERCISES 1baAlvaro LorcaNo ratings yet
- MT2OL-Ia6 2 1Document136 pagesMT2OL-Ia6 2 1QUILIOPE, JUSTINE JAY S.No ratings yet
- MTCNA Lab Guide INTRA 1st Edition - Id.en PDFDocument87 pagesMTCNA Lab Guide INTRA 1st Edition - Id.en PDFreyandyNo ratings yet
- 9th Biology NotesDocument12 pages9th Biology Notesramaiz darNo ratings yet
- API BasicsDocument6 pagesAPI BasicsSrinivas BathulaNo ratings yet
- Moxa PT g7728 Series Manual v1.4Document128 pagesMoxa PT g7728 Series Manual v1.4Walter Oluoch OtienoNo ratings yet
- IEC Download LinkDocument11 pagesIEC Download LinkMultitech InternationalNo ratings yet
- Reading Test 1: Questions 1-5 Refer To The Following ArticleDocument14 pagesReading Test 1: Questions 1-5 Refer To The Following ArticletrucNo ratings yet
- 2011 C1 CoMe ORGMIDocument8 pages2011 C1 CoMe ORGMIADJ ADJNo ratings yet
- Chapter 6: The Legal and Political Environment of Global BusinessDocument25 pagesChapter 6: The Legal and Political Environment of Global BusinessMaxineNo ratings yet
- Protocols For Public-Key CryptosystemsDocument13 pagesProtocols For Public-Key CryptosystemsIvo LemosNo ratings yet
- BRR Course 5Document19 pagesBRR Course 5Wade SperryNo ratings yet
- Fallas VenezuelaDocument20 pagesFallas VenezuelaDaniel Quintana GaviriaNo ratings yet
- Shapes of NailsDocument14 pagesShapes of NailsIyannNo ratings yet
- EPRI Automated Analysis of Bobbin CoilProbe Eddy Current DataDocument97 pagesEPRI Automated Analysis of Bobbin CoilProbe Eddy Current DataaldeanucuNo ratings yet