Download as pdf or txt
You might also like
- A Roller Chain Drive Model Including Contact With Guide-BarsDocument18 pagesA Roller Chain Drive Model Including Contact With Guide-BarsTrúc LinhhNo ratings yet
- A Roller Chain Drive Model Including Contact With Guide-BarsDocument18 pagesA Roller Chain Drive Model Including Contact With Guide-BarsPietroNo ratings yet
- +++experimental Identification of The Contact Parameters Between A V-Ribbed Belt and A PulleyDocument10 pages+++experimental Identification of The Contact Parameters Between A V-Ribbed Belt and A PulleyrafsebeNo ratings yet
- Improved Bushing Models For General Multibody Systems and Vehicle DynamicsDocument25 pagesImproved Bushing Models For General Multibody Systems and Vehicle DynamicsAlfoilNo ratings yet
- 142 PDFDocument26 pages142 PDFLoneSamuraiNo ratings yet
- Jurnal V-Belt Rafa Pradipta 9122015Document8 pagesJurnal V-Belt Rafa Pradipta 9122015afdhdan winataNo ratings yet
- Analysis of Rigid Dynamic of A Spatial Slider-Crank Mechanism With Spherical Clearance Joints Using ANSYS Software Huynh Ngoc Thai, SHYH-CHOUR HUANGDocument5 pagesAnalysis of Rigid Dynamic of A Spatial Slider-Crank Mechanism With Spherical Clearance Joints Using ANSYS Software Huynh Ngoc Thai, SHYH-CHOUR HUANGThaiHuynhNgocNo ratings yet
- CVT Dynamics-Theory and ExperimentsDocument21 pagesCVT Dynamics-Theory and ExperimentsSanjay HansdahNo ratings yet
- International Journal of Engineering Science: Farooq M, Dao Bo WangDocument13 pagesInternational Journal of Engineering Science: Farooq M, Dao Bo Wangphyco1954No ratings yet
- Dynamic Analysis For Planar Multibody Mechanical SDocument29 pagesDynamic Analysis For Planar Multibody Mechanical Smohit natuNo ratings yet
- Icinco2020 For springerLNEE v2Document25 pagesIcinco2020 For springerLNEE v21032220018No ratings yet
- Chapter IIDocument11 pagesChapter IIShayn ShaynNo ratings yet
- Mechanism and Machine TheoryDocument20 pagesMechanism and Machine TheoryKailashNo ratings yet
- A Mechatronic Approach For Anti-Slip Control in Railway TractionDocument6 pagesA Mechatronic Approach For Anti-Slip Control in Railway TractionLoftie DeyzelNo ratings yet
- Research ArticleDocument10 pagesResearch Articleattiq ur RehmanNo ratings yet
- Dynamic Modelling and Properties Analysis of 3RSR Parallel Mechanism Considering Spherical Joint Clearance and WearDocument16 pagesDynamic Modelling and Properties Analysis of 3RSR Parallel Mechanism Considering Spherical Joint Clearance and WearThaiHuynhNgocNo ratings yet
- Valve's Dynamic Damping Characteristics - Measurement and IdentificationDocument6 pagesValve's Dynamic Damping Characteristics - Measurement and IdentificationJuan OlguinNo ratings yet
- Gear Analysis1Document17 pagesGear Analysis1Nikola ČegecNo ratings yet
- Lab Manual 09 MussDocument11 pagesLab Manual 09 Mussmehtab ul hassanNo ratings yet
- 2012 Proceedings CST PAntunes Et AlDocument25 pages2012 Proceedings CST PAntunes Et AlErnest NsabimanaNo ratings yet
- Mechanism and Machine Theory: К. Bissembayev, Zh. IskakovDocument18 pagesMechanism and Machine Theory: К. Bissembayev, Zh. IskakovDennis AlexanderNo ratings yet
- Symmetry: Dynamic Behavior Analysis of A High-Rise Traction System With Tensioned Pulley Acting On Compensating RopeDocument26 pagesSymmetry: Dynamic Behavior Analysis of A High-Rise Traction System With Tensioned Pulley Acting On Compensating RopejayakumarNo ratings yet
- Traction Versus Slip in A Wheel-Driven Belt Conveyor: Mechanism and Machine TheoryDocument10 pagesTraction Versus Slip in A Wheel-Driven Belt Conveyor: Mechanism and Machine TheoryWashington MoraisNo ratings yet
- Yoke MechanismDocument25 pagesYoke MechanismNethaji Tr100% (1)
- Cai - 2020 - Finite Element Analysis of Archwire Parameters and Activation Forces On The MF Ratio of Vertical, L - A ND T-Loops-AnnotatedDocument12 pagesCai - 2020 - Finite Element Analysis of Archwire Parameters and Activation Forces On The MF Ratio of Vertical, L - A ND T-Loops-AnnotatedJonathan GIraldo MartinezNo ratings yet
- Numerical Study On Elastic Deformation of Belt in Power Transmission of Belt Drive SystemDocument5 pagesNumerical Study On Elastic Deformation of Belt in Power Transmission of Belt Drive SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Energies 11 02687Document17 pagesEnergies 11 02687Lucas ErburuNo ratings yet
- Dynamics of Spatial Flexible Multibody Systems With Clearance and Lubricated Spherical JointsDocument17 pagesDynamics of Spatial Flexible Multibody Systems With Clearance and Lubricated Spherical JointsThaiHuynhNgocNo ratings yet
- Flexible Arm On ShaftDocument26 pagesFlexible Arm On ShaftCleves AxiomaNo ratings yet
- Commande San Modele Robot A 2dllDocument18 pagesCommande San Modele Robot A 2dllElleuch DorsafNo ratings yet
- Chapter7 Conclusion and Future ScopeDocument2 pagesChapter7 Conclusion and Future ScopeMohammad ShoebNo ratings yet
- An Acceleration-Based State Observer For Robot Manipulators With Elastic JointsDocument7 pagesAn Acceleration-Based State Observer For Robot Manipulators With Elastic JointsJyotirekha PatiNo ratings yet
- Index: History Chain Drive Design Chain Failures and Analysis Conclusion ReferenceDocument8 pagesIndex: History Chain Drive Design Chain Failures and Analysis Conclusion ReferenceGaganpreetSinghGindraNo ratings yet
- Multi-Body Dynamics and Vibration AnalysisDocument13 pagesMulti-Body Dynamics and Vibration AnalysisGogyNo ratings yet
- Mechanical Systems and Signal Processing: Robert Konowrocki, Tomasz Szolc, Andrzej Pochanke, Agnieszka PR ĘgowskaDocument17 pagesMechanical Systems and Signal Processing: Robert Konowrocki, Tomasz Szolc, Andrzej Pochanke, Agnieszka PR ĘgowskaAnita IonelaNo ratings yet
- Pimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismDocument43 pagesPimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismNarendra ChavdaNo ratings yet
- Tribological and Dynamical Analysis of A Brake Pad With Multiple Blocks For A High-Speed TrainDocument18 pagesTribological and Dynamical Analysis of A Brake Pad With Multiple Blocks For A High-Speed TrainMuhammad NuzanNo ratings yet
- A Unified Formulation For Mechanical Joints With and Without Clearances-Bushings And-Or Stops in The Framework of Multibody SystemsDocument29 pagesA Unified Formulation For Mechanical Joints With and Without Clearances-Bushings And-Or Stops in The Framework of Multibody SystemsAlfoilNo ratings yet
- Kinematics of MachineryDocument65 pagesKinematics of Machinerykumaravel07No ratings yet
- Friction JDSMCDocument8 pagesFriction JDSMCVijay KumarNo ratings yet
- Articulo Teoría de Mecanismos y MáquinasDocument16 pagesArticulo Teoría de Mecanismos y MáquinaspruebaNo ratings yet
- Kinematics of Machinery NotesDocument65 pagesKinematics of Machinery NotesVenkatesh Rajamani100% (1)
- Mero Ball Joint PDFDocument7 pagesMero Ball Joint PDFAnonymous hk1fhAkwyNo ratings yet
- Experiment4 Group3Document43 pagesExperiment4 Group3debojit.dasNo ratings yet
- Dynamic Modeling of A Gear Transmission System Containing Damping Particles Using Coupled Multi-Body Dynamics and Discrete Element MethodDocument21 pagesDynamic Modeling of A Gear Transmission System Containing Damping Particles Using Coupled Multi-Body Dynamics and Discrete Element MethodluuthuanNo ratings yet
- Mechanics of Machines Part 1Document27 pagesMechanics of Machines Part 1kimosave99No ratings yet
- 10 1016@j Precisioneng 2020 10 010Document20 pages10 1016@j Precisioneng 2020 10 010Ho Nhat LinhNo ratings yet
- Lecturer Notes - Kinematics of MachineryDocument65 pagesLecturer Notes - Kinematics of Machineryehsan_shameli100% (1)
- Bme Lab Manual FeDocument37 pagesBme Lab Manual FeArpit PangariaNo ratings yet
- Lab Manual For Kinematics of MachinesDocument18 pagesLab Manual For Kinematics of Machinesshailendra_236No ratings yet
- Dynamic Response and Nonlinear Characteristics of Multi-Link Mechanism With Clearance JointsDocument33 pagesDynamic Response and Nonlinear Characteristics of Multi-Link Mechanism With Clearance JointsThaiHuynhNgocNo ratings yet
- Compliant Folded Beam Suspension MechanismDocument18 pagesCompliant Folded Beam Suspension Mechanismomer elaminNo ratings yet
- An Experimental Web Tension Control System: System Set-Up: Giannoccaro, N.I. Oishi, K. & Sakamoto, TDocument0 pagesAn Experimental Web Tension Control System: System Set-Up: Giannoccaro, N.I. Oishi, K. & Sakamoto, TSheik HassanNo ratings yet
- Problem DefinitionDocument3 pagesProblem DefinitionGaurav PawarNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisFrom EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNo ratings yet
- Mechanical Properties of Nanostructured Materials: Quantum Mechanics and Molecular Dynamics InsightsFrom EverandMechanical Properties of Nanostructured Materials: Quantum Mechanics and Molecular Dynamics InsightsNo ratings yet
- The Effect of Torque Direction On Hand-Object CouplingDocument2 pagesThe Effect of Torque Direction On Hand-Object Couplingmaran.suguNo ratings yet
- Laird Tech - TEC Torque CalculationDocument2 pagesLaird Tech - TEC Torque Calculationmaran.suguNo ratings yet
- Tolerance With PMIDocument6 pagesTolerance With PMImaran.suguNo ratings yet
- C6-Friction Part IIDocument13 pagesC6-Friction Part IImaran.suguNo ratings yet
- Boundary Vlaue Problem Module 4 With Solutions Page21-39Document19 pagesBoundary Vlaue Problem Module 4 With Solutions Page21-39maran.suguNo ratings yet
- C5-Equilibrium Part IIDocument11 pagesC5-Equilibrium Part IImaran.suguNo ratings yet
- General Beam Theory Module 8 Page11-20Document10 pagesGeneral Beam Theory Module 8 Page11-20maran.suguNo ratings yet
- Boundary Vlaue Problem Module 4 With Solutions Page 1-20Document20 pagesBoundary Vlaue Problem Module 4 With Solutions Page 1-20maran.suguNo ratings yet
- Stability & Buckling Module 9Document10 pagesStability & Buckling Module 9maran.suguNo ratings yet
- LW20Document2 pagesLW20maran.suguNo ratings yet
- C3Problem ExamplesDocument46 pagesC3Problem Examplesmaran.suguNo ratings yet
- Torsion Module 6 With SolutionsDocument26 pagesTorsion Module 6 With Solutionsmaran.suguNo ratings yet
- C2 - Problem ExamplesDocument25 pagesC2 - Problem Examplesmaran.suguNo ratings yet
- Engineering Drawings - ThayerDocument39 pagesEngineering Drawings - Thayermaran.suguNo ratings yet
- BasicTools Tolerance AnlaysisDocument13 pagesBasicTools Tolerance Anlaysismaran.suguNo ratings yet
- Medical Device Materials - Stainless SteelDocument5 pagesMedical Device Materials - Stainless Steelmaran.suguNo ratings yet
- Module07 Beam TheoryDocument15 pagesModule07 Beam Theorymaran.suguNo ratings yet
- New EN ISO Risk Management StandardDocument24 pagesNew EN ISO Risk Management Standardmaran.suguNo ratings yet
- The Role of Experiential Value in Online ShoppingDocument25 pagesThe Role of Experiential Value in Online ShoppingAntonia Burlacenco100% (1)
- A Thesis Submitted To: in Partial Fulfillment For Award of The Degree ofDocument16 pagesA Thesis Submitted To: in Partial Fulfillment For Award of The Degree ofPravat SatpathyNo ratings yet
- Present Perfect Extra Practice 3 Ano - Answer Key PDFDocument7 pagesPresent Perfect Extra Practice 3 Ano - Answer Key PDFGerson de OliveiraNo ratings yet
- ??classroom Management??Document6 pages??classroom Management??LEPARTO MARK AUGUSTINE R.No ratings yet
- Carpe Diem International School - Best School in RajpuraDocument10 pagesCarpe Diem International School - Best School in RajpuraCarpe DiemNo ratings yet
- Motivation Across CulturesDocument21 pagesMotivation Across CulturesSana SajidNo ratings yet
- Complete KEY For Schools - Unit10 PDFDocument3 pagesComplete KEY For Schools - Unit10 PDFMarta ECNo ratings yet
- Professional EducationDocument26 pagesProfessional EducationWinjhe CapuyanNo ratings yet
- The Relationship BetweenDocument9 pagesThe Relationship BetweenMr. FernandoNo ratings yet
- Symbol and Meaning of Kapata Oral Tradition Texts in Central MalukuDocument9 pagesSymbol and Meaning of Kapata Oral Tradition Texts in Central MalukubudiarmanNo ratings yet
- A. The Contrastive Analysis Hypothesis - Ronald WardhaughDocument15 pagesA. The Contrastive Analysis Hypothesis - Ronald WardhaughjulianNo ratings yet
- College Students' Trait Gratitude and Subjective Well-Being Mediated by Basic Psychological NeedsDocument11 pagesCollege Students' Trait Gratitude and Subjective Well-Being Mediated by Basic Psychological NeedsGeorges El NajjarNo ratings yet
- Applied Sanskrit Grammar CourseDocument5 pagesApplied Sanskrit Grammar CourseFrederickSharmaNo ratings yet
- 187307Document344 pages18730751abc51No ratings yet
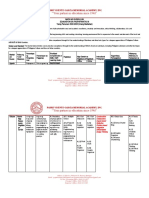
- TS25 - 2017 (23112017)Document31 pagesTS25 - 2017 (23112017)CASEY MG YUMAN100% (1)
- DNR GeneratorDocument68 pagesDNR GeneratorCatalin234No ratings yet
- Cherokee Grammar Can Cannot Forms PDFDocument4 pagesCherokee Grammar Can Cannot Forms PDFWyman Kirk100% (2)
- MSD PresentationDocument17 pagesMSD PresentationBHANUNo ratings yet
- Materi Prof Utami WDocument49 pagesMateri Prof Utami WCak Hendri SusiloNo ratings yet
- Behavioural Assessment Scales For Adult LivingDocument112 pagesBehavioural Assessment Scales For Adult LivingMeeta MathurNo ratings yet
- Literature Review On MultimodalityDocument8 pagesLiterature Review On MultimodalitybeaverscNo ratings yet
- Pragmatism Versus The Pragmatist (A.O. Lovejoy)Document51 pagesPragmatism Versus The Pragmatist (A.O. Lovejoy)KarlHeintzNo ratings yet
- LessonplanoryDocument4 pagesLessonplanoryapi-316836295No ratings yet
- Cover TesisDocument15 pagesCover TesisMuhammad bahrul UlaNo ratings yet
- III Kant and Categorical ImperativeDocument26 pagesIII Kant and Categorical ImperativehdkNo ratings yet
- Mapa NG Kurikulum 8 Unang MarkahanDocument14 pagesMapa NG Kurikulum 8 Unang MarkahanRennel HernandezNo ratings yet
- 23 AppendicesDocument24 pages23 AppendicesShashi Bhushan SonbhadraNo ratings yet
- Extende Defintion Lesson PlanDocument8 pagesExtende Defintion Lesson Planapi-313756719No ratings yet
- Bhate and KakDocument17 pagesBhate and KakratNo ratings yet
- Resume WeeblyDocument2 pagesResume Weeblyapi-281027473No ratings yet